识别喷浆机器人管道堵塞的柔性传感器及其制备方法与流程
本发明涉及传感器,尤其涉及一种识别喷浆机器人管道堵塞的柔性传感器及其制备方法。
背景技术:
1、随着经济的飞速发展,交通运输所起的作用也越来越突出,为了进一步改善交通状况,越来越多的隧道开始修建,但隧道的修建往往伴随着恶劣的环境,不仅影响施工人员的健康,而且有很大的安全隐患,像塌方、气体中毒等。喷浆支护是修建隧道非常重要的一个环节,最常用的方法便是人工喷涂,这也产生了很大的安全隐患,因此需要喷浆机器人这种远程操控的无人机器人。
2、目前,现有的喷浆机器人在工作时,现场是无人的状况,若配置的喷浆溶液不均匀容易造成喷浆管道堵塞,进而出现机器工作但不喷浆的情况。现有的喷浆机器人上没有识别喷浆机器人管道堵塞的柔性传感器,不能检测运行的喷浆机器人的喷浆管道是否正常运作。
技术实现思路
1、本发明提供一种识别喷浆机器人管道堵塞的柔性传感器及其制备方法,以解决现有喷浆机器人上没有识别喷浆机器人管道堵塞的柔性传感器,不能检测运行的喷浆机器人的喷浆管道是否正常运作的问题。
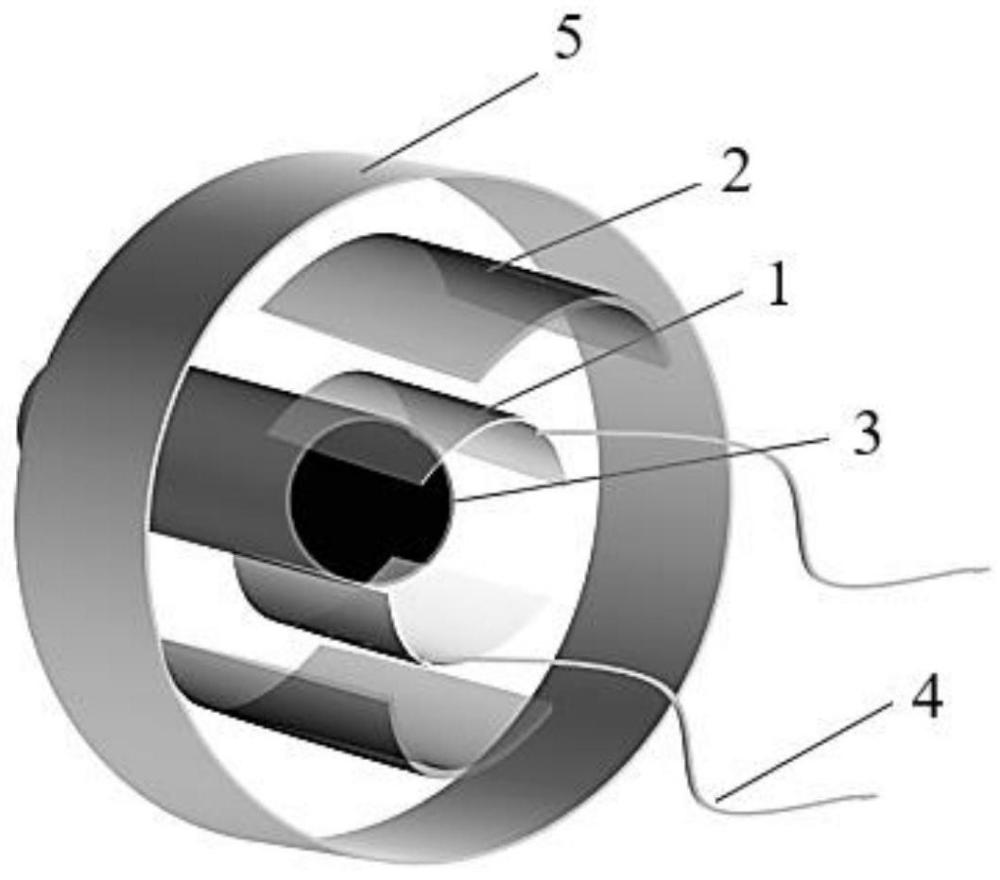
2、为了实现上述目的,第一方面,本发明提供一种识别喷浆机器人管道堵塞的柔性传感器,包括上层、中间层和下层,中间层为喷浆管道,上层和下层均为矩形柔性导电薄膜,导电薄膜上覆盖pdms薄膜,上层导电薄膜与下层导电薄膜对正贴合在喷浆管道的外壁上,导电薄膜通过pi胶带固定在喷浆管道上,导电薄膜与铜导线连接。
3、在上述的识别喷浆机器人管道堵塞的柔性传感器中,可选的是,导电薄膜的厚度为300~600um。
4、在上述的识别喷浆机器人管道堵塞的柔性传感器中,可选的是,导电薄膜的宽度不大于喷浆管道的直径。
5、第二方面,本发明提供一种识别喷浆机器人管道堵塞的柔性传感器的制备方法,包括:
6、步骤一:通过旋涂仪将配置好的导电聚合物溶液以500转每分的速度运转10s,然后用大于1000转每分的速度运转30s制备出液态导电薄膜;
7、步骤二:利用恒温箱对液态导电薄膜进行固化,然后用超声清洗剂对固化的导电薄膜进行剥离;
8、步骤三:将剥离后的导电薄膜裁剪出矩形后用pdms溶液涂覆,继续恒温箱固化得到上电极层导电薄膜;
9、步骤四:重复步骤一至步骤三进行下电极层导电薄膜制作;
10、步骤五:将上层和下层导电薄膜正对贴合在中间层喷浆管道上,利用pi胶带包裹导电薄膜与喷浆管道实现电极固定,完成单个电容式柔性传感器的制备。
11、在上述的识别喷浆机器人管道堵塞的柔性传感器的制备方法中,导电聚合物溶液包括炭黑、碳纳米管、热塑性聚氨酯和n,n-二甲基甲酰胺。
12、在上述的识别喷浆机器人管道堵塞的柔性传感器的制备方法中,热塑性聚氨酯和n,n-二甲基甲酰胺的质量比为1:5。
13、在上述的识别喷浆机器人管道堵塞的柔性传感器的制备方法中,导电聚合物溶液中炭黑的含量为总质量的5%-10%。
14、在上述的识别喷浆机器人管道堵塞的柔性传感器的制备方法中,碳纳米管的含量为总质量的1%-4%。
15、在上述的识别喷浆机器人管道堵塞的柔性传感器的制备方法中,步骤二中利用恒温箱对液态导电薄膜进行固化时的温度设置为45-65℃,加热时长为8-15min。
16、在上述的识别喷浆机器人管道堵塞的柔性传感器的制备方法中,步骤三中继续恒温箱固化的温度设置为70℃-90℃,加热时长为40min-60min。
17、本发明提供的识别喷浆机器人管道堵塞的柔性传感器及其制备方法,其中,柔性传感器包括上层、中间层和下层,中间层为喷浆管道,上层和下层均为矩形柔性导电薄膜,导电薄膜上覆盖pdms薄膜,上层导电薄膜与下层导电薄膜对正贴合在喷浆管道的外壁上,导电薄膜通过pi胶带固定在喷浆管道上,导电薄膜与铜导线连接,通过柔性传感器能够在无人环境下检测运行的喷浆机器人的喷浆管道是否正常运作,同时能够通过调节电极的尺寸来调节柔性传感器的灵敏度与工作范围,便于应用到不同直径的管道;通过旋涂工艺实现上下层导电薄膜的制作,能够通过控制转速来获得厚度均匀的涂层,相比用模具制作,机器操作可以尽量减小操作误差,避免对传感器性能造成较大影响。
18、本发明的构造以及它的其他发明目的及有益效果将会通过结合附图而对优选实施例的描述而更加明显易懂。
技术特征:
1.一种识别喷浆机器人管道堵塞的柔性传感器,其特征在于,包括上层、中间层和下层,所述中间层为喷浆管道,所述上层和所述下层均为矩形柔性导电薄膜,所述导电薄膜上覆盖pdms薄膜,上层所述导电薄膜与下层所述导电薄膜对正贴合在所述喷浆管道的外壁上,所述导电薄膜通过pi胶带固定在所述喷浆管道上,所述导电薄膜与铜导线连接。
2.根据权利要求1所述的识别喷浆机器人管道堵塞的柔性传感器,其特征在于,所述导电薄膜的厚度为300~600um。
3.根据权利要求1或2所述的识别喷浆机器人管道堵塞的柔性传感器,其特征在于,所述导电薄膜的宽度不大于所述喷浆管道的直径。
4.一种识别喷浆机器人管道堵塞的柔性传感器的制备方法,其特征在于,所述方法包括:
5.根据权利要求4所述的识别喷浆机器人管道堵塞的柔性传感器的制备方法,其特征在于,所述导电聚合物溶液包括炭黑、碳纳米管、热塑性聚氨酯和n,n-二甲基甲酰胺。
6.根据权利要求5所述的识别喷浆机器人管道堵塞的柔性传感器的制备方法,其特征在于,热塑性聚氨酯和n,n-二甲基甲酰胺的质量比为1:5。
7.根据权利要求6所述的识别喷浆机器人管道堵塞的柔性传感器的制备方法,其特征在于,所述导电聚合物溶液中炭黑的含量为总质量的5%-10%。
8.根据权利要求7所述的识别喷浆机器人管道堵塞的柔性传感器的制备方法,其特征在于,碳纳米管的含量为总质量的1%-4%。
9.根据权利要求8所述的识别喷浆机器人管道堵塞的柔性传感器的制备方法,其特征在于,所述步骤二中利用恒温箱对液态导电薄膜进行固化时的温度设置为45-65℃,加热时长为8-15min。
10.根据权利要求9所述的识别喷浆机器人管道堵塞的柔性传感器的制备方法,其特征在于,所述步骤三中继续恒温箱固化的温度设置为70℃-90℃,加热时长为40min-60min。
技术总结
本发明涉及传感器技术领域,尤其涉及一种识别喷浆机器人管道堵塞的柔性传感器及其制备方法,旨在解决现有喷浆机器人上没有识别喷浆机器人管道堵塞的柔性传感器,不能检测运行的喷浆机器人的喷浆管道是否正常运作的问题。该识别喷浆机器人管道堵塞的柔性传感器及其制备方法,其中,柔性传感器包括上层、中间层和下层,中间层为喷浆管道,上层和下层均为矩形柔性导电薄膜,导电薄膜上覆盖PDMS薄膜,上层导电薄膜与下层导电薄膜对正贴合在喷浆管道的外壁上,通过柔性传感器能够在无人环境下检测运行的喷浆机器人的喷浆管道是否正常运作;通过旋涂工艺实现上下层导电薄膜的制作,能够通过控制转速来获得厚度均匀的涂层。
技术研发人员:郭建泉,杨以明,郝生雷,杜明超,张振扬,张坤,申棣,薛怀浩,刘勇,徐鹏,马斌,赵文秀,韩海龙,王建鑫
受保护的技术使用者:兖矿能源集团股份有限公司
技术研发日:
技术公布日:2024/4/7
- 还没有人留言评论。精彩留言会获得点赞!