拓扑路径图生成方法、装置、机器人及存储介质与流程
本申请涉及机器人,特别是涉及一种拓扑路径图生成方法、装置、机器人及计算机可读存储介质。
背景技术:
1、随着机器人技术的发展,利用机器人活动区域的空间特征,生成能够用于指导机器人空间移动的导航地图的方法,对于移动机器人能够顺畅完成对应的业务操作具有十分重要的意义。
2、现有技术中,通常是基于广义维诺图等图像形态学的方法,生成对应的拓扑路径图,其所生成的路径图只能粗略规划机器人路径,准确性较差。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种拓扑路径图生成方法、装置、机器人及计算机可读存储介质,提高所生成路径图的准确性。
2、第一方面,本申请提供了一种拓扑路径图生成方法,包括:
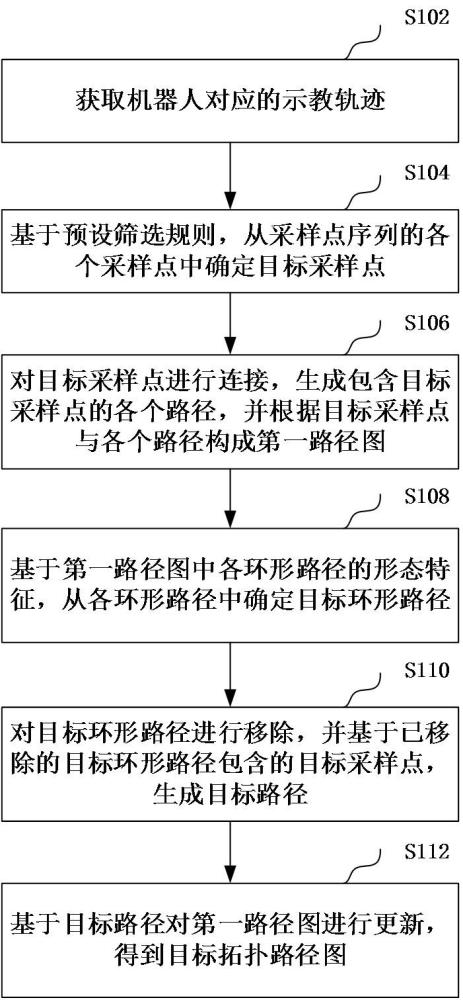
3、获取机器人对应的示教轨迹,示教轨迹包括采样点序列;
4、基于预设筛选规则,从采样点序列的各个采样点中确定目标采样点,预设筛选规则基于各个采样点的采样频次或各个采样点与相邻采样点所构成圆弧的曲率确定;
5、对目标采样点进行连接,生成包含目标采样点的各个路径,并根据目标采样点与各个路径构成第一路径图;
6、基于第一路径图中各环形路径的形态特征,从各环形路径中确定目标环形路径;
7、对目标环形路径进行移除,并基于已移除的目标环形路径包含的目标采样点,生成目标路径;
8、基于目标路径对第一路径图进行更新,得到目标拓扑路径图,目标拓扑路径图用于对机器人进行路径导航。
9、在一个实施例中,基于预设筛选规则,从采样点序列的各个采样点中确定目标采样点,包括:
10、分别将各个采样点的采样频次与第一阈值进行比较,将采样频次大于第一阈值的采样点及其预设范围内的采样点确定为第一采样点;
11、分别基于各个采样点及对应相邻采样点所构成的目标圆弧,确定目标圆弧对应的曲率,并将曲率大于第二阈值的采样点确定为第二采样点;
12、基于第一采样点与第二采样点,确定目标采样点。
13、在一个实施例中,对目标采样点进行连接,生成包含目标采样点的各个路径,并根据目标采样点与各个路径构成第一路径图之后,还包括:
14、分别确定第一路径图中各个目标采样点与最相邻路径的距离,并将距离小于距离阈值的目标采样点确定为参考采样点,最相邻路径为对应目标采样点所在路径之外距离最近的路径;
15、对参考采样点对应的最相邻路径进行拆分,得到拆分后的分段路径,以使分段路径经过参考采样点;
16、基于分段路径对第一路径图进行更新,得到更新后的第一路径图。
17、在一个实施例中,基于第一路径图中各环形路径的形态特征,从各环形路径中确定目标环形路径,包括:
18、分别计算第一路径图中各环形路径所围成图形的面积周长比;
19、将面积周长比小于第三阈值所对应的环形路径,确定为目标环形路径。
20、在一个实施例中,对目标环形路径进行移除,并基于已移除的目标环形路径包含的目标采样点,生成目标路径,包括:
21、确定目标环形路径中的出口采样点,出口采样点为目标采样点中包含至少三条相邻路径的采样点;
22、基于目标环形路径中的出口采样点,确定目标环形路径对应的目标连接点,并基于目标连接点,生成对应的目标路径。
23、在一个实施例中,基于目标环形路径中的出口采样点,确定目标环形路径对应的目标连接点,并基于目标连接点,生成对应的目标路径,包括:
24、若目标环形路径包含一个出口采样点,则将目标环形路径移除,并将出口采样点对应的其他相邻路径作为目标路径;
25、若目标环形路径包含两个出口采样点,则将目标环形路径移除,并保留两个出口采样点,并基于两个出口采样点生成对应的目标路径。
26、在一个实施例中,基于目标环形路径中的出口采样点,确定目标环形路径对应的目标连接点,并基于目标连接点,生成对应的目标路径,包括:
27、若目标环形路径包含三个及以上的出口采样点,则计算目标环形路径所围成图形的中心点;
28、基于中心点,生成对应的目标路径。
29、第二方面,本申请还提供了一种拓扑路径图生成装置,包括:
30、构图模块,用于获取机器人对应的示教轨迹,示教轨迹包括采样点序列;基于预设筛选规则,从采样点序列的各个采样点中确定目标采样点,预设筛选规则基于各个采样点的采样频次或各个采样点与相邻采样点所构成圆弧的曲率确定;对目标采样点进行连接,生成包含目标采样点的各个路径,并根据目标采样点与各个路径构成第一路径图;
31、生成模块,用于基于第一路径图中各环形路径的形态特征,从各环形路径中确定目标环形路径;对目标环形路径进行移除,并基于已移除的目标环形路径包含的目标采样点,生成目标路径;
32、更新模块,用于基于目标路径对第一路径图进行更新,得到目标拓扑路径图,目标拓扑路径图用于对机器人进行路径导航。
33、第三方面,本申请还提供了一种机器人,包括存储器和处理器,存储器存储有计算机程序,处理器执行该计算机程序时实现如下步骤:
34、获取机器人对应的示教轨迹,示教轨迹包括采样点序列;
35、基于预设筛选规则,从采样点序列的各个采样点中确定目标采样点,预设筛选规则基于各个采样点的采样频次或各个采样点与相邻采样点所构成圆弧的曲率确定;
36、对目标采样点进行连接,生成包含目标采样点的各个路径,并根据目标采样点与各个路径构成第一路径图;
37、基于第一路径图中各环形路径的形态特征,从各环形路径中确定目标环形路径;
38、对目标环形路径进行移除,并基于已移除的目标环形路径包含的目标采样点,生成目标路径;
39、基于目标路径对第一路径图进行更新,得到目标拓扑路径图,目标拓扑路径图用于对机器人进行路径导航。
40、第四方面,本申请提供了一种计算机可读存储介质,其上存储有计算机程序,计算机程序被处理器执行时,使得处理器执行上述拓扑路径图生成方法的步骤。
41、上述拓扑路径图生成方法、装置、机器人及计算机可读存储介质,通过机器人的示教轨迹所对应的采样点,基于采样点的采样频次与各个采样点及相邻采样点所构成圆弧的曲率进行采样点筛选,进而有效确定示教轨迹中交叉路口处的采样点以及转弯处的目标采样点,再根据目标采样点及相连所确定的各条路径构成第一路径图,再针对第一路径图中各环形路径的形态特征,确定出需要被移除的目标环形路径,接着对目标环形路径进行移除,以使移除目标环形路径后的第一路径图能够更加准确地表征机器人可达路径的位置,消除路径图中的错误、冗余路径,提高所生成路径图的准确性,从而使得利用该路径图的机器人路径导航更加准确与高效。
技术特征:
1.一种拓扑路径图生成方法,其特征在于,所述方法包括:
2.根据权利要求1的方法,其特征在于,所述基于预设筛选规则,从所述采样点序列的各个采样点中确定目标采样点,包括:
3.根据权利要求1所述的方法,其特征在于,所述对所述目标采样点进行连接,生成包含所述目标采样点的各个路径,并根据所述目标采样点与所述各个路径构成第一路径图之后,还包括:
4.根据权利要求1所述的方法,其特征在于,所述基于所述第一路径图中各环形路径的形态特征,从所述各环形路径中确定目标环形路径,包括:
5.根据权利要求1所述的方法,其特征在于,所述对所述目标环形路径进行移除,并基于已移除的目标环形路径包含的目标采样点,生成目标路径,包括:
6.根据权利要求5所述的方法,其特征在于,所述基于所述目标环形路径中的出口采样点,确定所述目标环形路径对应的目标连接点,并基于所述目标连接点,生成对应的目标路径,包括:
7.根据权利要求5所述的方法,其特征在于,所述基于所述目标环形路径中的出口采样点,确定所述目标环形路径对应的目标连接点,并基于所述目标连接点,生成对应的目标路径,包括:
8.一种拓扑路径图生成装置,其特征在于,所述装置包括:
9.一种机器人,包括存储器和处理器,所述存储器存储有计算机程序,其特征在于,所述处理器执行所述计算机程序时实现权利要求1至7中任一项所述方法的步骤。
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1至7中任一项所述方法的步骤。
技术总结
本申请涉及一种拓扑路径图生成方法、装置、机器人及存储介质。包括:获取机器人对应的示教轨迹,示教轨迹包括采样点序列;基于预设筛选规则,从采样点序列的各个采样点中确定目标采样点,预设筛选规则基于各个采样点的采样频次或各个采样点与相邻采样点所构成圆弧的曲率确定;对目标采样点进行连接,生成包含目标采样点的各个路径,并根据目标采样点与各个路径构成第一路径图;基于第一路径图中各环形路径的形态特征,从各环形路径中确定目标环形路径;对目标环形路径进行移除,并基于已移除的目标环形路径包含的目标采样点,生成目标路径;基于目标路径对第一路径图进行更新,得到目标拓扑路径图。采用本方法能够提高所生成路径图的准确性。
技术研发人员:陈经纬,商成思
受保护的技术使用者:深圳市普渡科技有限公司
技术研发日:
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!