一种越野环境中路径规划方法、系统及设备
本发明涉及路径规划,特别是涉及一种越野环境中路径规划方法、系统及设备。
背景技术:
1、近年来,针对城市环境的自动驾驶领域已经出现了大批可靠的路径规划方案,然而针对越野环境路径规划的研究还不够成熟。在越野环境中,无人车辆往往面临着复杂的地形和多样化的场景,然而目前的路径规划方法大多没有与越野环境的场景结合起来。在现有的prm(概率路线图,probabilistic roadmap)算法中,对环境进行采样时采取的策略是均匀采样,而这种做法会使得算法耗费大量时间在采样和碰撞检测上。
技术实现思路
1、本发明的目的是提供一种越野环境局部路径规划方法、系统及设备,提高越野环境下的路径规划效率,保证实时性。
2、为实现上述目的,本发明提供了如下方案。
3、第一方面,本发明提供一种越野环境中路径规划方法,包括。
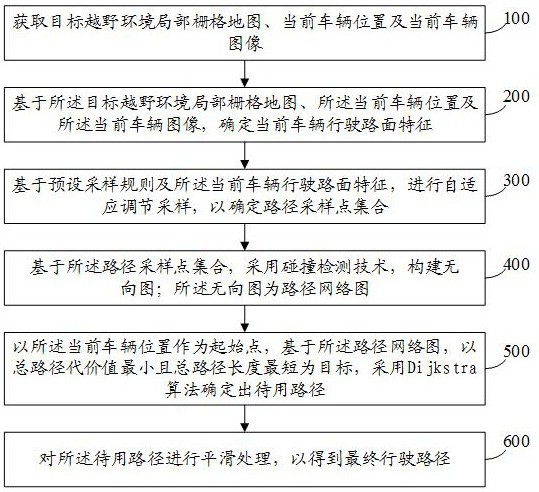
4、获取目标越野环境局部栅格地图、当前车辆位置及当前车辆图像;所述目标越野环境局部栅格地图中包括障碍物和道路。
5、基于所述目标越野环境局部栅格地图、所述当前车辆位置及所述当前车辆图像,确定当前车辆行驶路面特征;所述当前车辆行驶路面特征包括车辆行驶道路宽度特征、车辆周围障碍物特征。
6、基于预设采样规则及所述当前车辆行驶路面特征,进行自适应调节采样,以确定路径采样点集合。
7、基于所述路径采样点集合,采用碰撞检测技术,构建无向图;所述无向图为路径网络图。
8、以所述当前车辆位置作为起始点,基于所述路径网络图,以总路径代价值最小且总路径长度最短为目标,采用dijkstra算法确定出待用路径;所述总路径长度指所述起始点与预设车辆行驶终点之间的路径长度;所述总路径代价值为基于障碍物的代价值及基于距离的代价值之和。
9、对所述待用路径进行平滑处理,以得到最终行驶路径。
10、第二方面,本发明提供一种越野环境中路径规划系统,包括。
11、地图及车辆位置获取模块,用于获取目标越野环境局部栅格地图、当前车辆位置及当前车辆图像;所述目标越野环境局部栅格地图中包括障碍物和道路。
12、路面特征确定模块,用于基于所述目标越野环境局部栅格地图、所述当前车辆位置及所述当前车辆图像,确定当前车辆行驶路面特征;所述当前车辆行驶路面特征包括车辆行驶道路宽度特征、车辆周围障碍物特征。
13、路径采样点确定模块,用于基于预设采样规则及所述当前车辆行驶路面特征,进行自适应调节采样,以确定路径采样点集合。
14、路径网络图确定模块,用于基于所述路径采样点集合,采用碰撞检测技术,构建无向图;所述无向图为路径网络图。
15、待用路径确定模块,用于以所述当前车辆位置作为起始点,基于所述路径网络图,以总路径代价值最小且总路径长度最短为目标,采用dijkstra算法确定出待用路径;所述总路径长度指所述起始点与预设车辆行驶终点之间的路径长度;所述总路径代价值为基于障碍物的代价值及基于距离的代价值之和。
16、最终路径确定模块,用于对所述待用路径进行平滑处理,以得到最终行驶路径。
17、第三方面,本发明提供一种电子设备,包括存储器及处理器,存储器用于存储计算机程序,处理器运行计算机程序以使电子设备执行越野环境中路径规划方法。
18、根据本发明提供的具体实施例,本发明公开了以下技术效果:本发明公开一种越野环境中路径规划方法、系统及设备,基于目标越野环境局部栅格地图、当前车辆位置及当前车辆图像,确定当前车辆行驶路面特征,包括车辆行驶道路宽度特征、车辆周围障碍物特征,进而结合预设采样规则,进行自适应调节采样,以确定路径采样点集合。这样的处理能够实现能够根据越野环境自适应调节采样,避免了无意义的采样点的生成以及对应的碰撞检测,能够减少构建路径网络图所耗费的时间,提高路径规划算法的效率,增强了其实时性。然后,构建无向图,以总路径代价值最小且总路径长度最短为目标、采用dijkstra算法(迪杰斯特拉算法)确定出待用路径,最后进行平滑处理,从而得到更高效、更精确及更安全的最终行驶路径。本发明针对越野环境,可以提高prm算法构建路径网络图的效率,增强局部路径规划的实时性,以保证无人车辆在越野环境中的安全性。
技术特征:
1.一种越野环境中路径规划方法,其特征在于,方法包括:
2.根据权利要求1所述的越野环境中路径规划方法,其特征在于,所述预设采样规则包括第一预设规则、第二预设规则及第三预设规则;
3.根据权利要求2所述的越野环境中路径规划方法,其特征在于,所述路径采样点的确定过程,具体包括:
4.根据权利要求1所述的越野环境中路径规划方法,其特征在于,基于所述路径采样点集合,采用碰撞检测技术,构建无向图,具体包括:
5.根据权利要求1所述的越野环境中路径规划方法,其特征在于,所述总路径代价值的计算公式为:
6.根据权利要求1所述的越野环境中路径规划方法,其特征在于,对所述待用路径进行平滑处理,以得到最终行驶路径,具体包括:
7.根据权利要求1所述的越野环境中路径规划方法,其特征在于,所述目标越野环境局部栅格地图的构建过程,具体包括:
8.一种越野环境中路径规划系统,其特征在于,系统包括:
9.一种电子设备,其特征在于,包括存储器及处理器,存储器用于存储计算机程序,处理器运行计算机程序以使电子设备执行权利要求1-7任一项所述的越野环境中路径规划方法。
技术总结
本发明公开一种越野环境中路径规划方法、系统及设备,涉及路径规划技术领域,方法包括:基于目标越野环境局部栅格地图、当前车辆位置及当前车辆图像,确定当前车辆行驶路面特征,包括车辆行驶道路宽度特征、车辆周围障碍物特征;基于预设采样规则及当前车辆行驶路面特征,进行自适应调节采样,以确定路径采样点集合,进而采用碰撞检测技术,构建路径网络图;以当前车辆位置作为起始点,基于路径网络图,以总路径代价值最小且总路径长度最短为目标,采用Dijkstra算法确定出待用路径;对待用路径进行平滑处理,以得到最终行驶路径。本发明提高了越野环境下的路径规划效率,保证实时性。
技术研发人员:聂士达,谢雨佳,刘辉,廖志昊,韩立金
受保护的技术使用者:北京理工大学
技术研发日:
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!