基于光线追踪的双偏振光子计数测深激光雷达成像方法
本发明涉及激光成像的,尤其涉及一种基于光线追踪的双偏振光子计数测深激光雷达成像方法。
背景技术:
1、近岸水深测量对海洋工程、海岸安全和环境监测非常重要,其涉及的范围不仅仅在沿海地区,还包括近远海岛屿、礁盘等。激光雷测深技术作为一种新型海洋测深手段,通过记录激光脉冲从发射到接收的时间间隔与光在空气和水中传播的速度差异计算,它在海洋、湖泊、河流等水域的深度测量和地形建模中得到广泛应用。
2、在现有研究中,发现针对双偏振机载光子计数激光雷达的成像方法研究较少,缺少严密的三维成像模型建立方法。抑制水面返回的激光回波能量,提升探测水底回波信号的能力,目前的方法主要分为软件法和硬件法。软件方法通过算法提取水底信号,例如利用高斯分解技术对波形建模、重力法与一阶导数交叉法估计波形分量的数量等。硬件方法则通过调节激光雷达的偏振来增强回波强度,利用激光在不同介质中的偏振态有效识别水面和水底信号。
3、然而,目前提出的方法虽然能够提高现有激光雷达回波强度,但对于双偏振机载光子计数激光雷达的偏振方面研究较少,难以实现精确的水深探测和成像。
技术实现思路
1、本发明提供了一种基于光线追踪的双偏振光子计数测深激光雷达成像方法,用于岛礁、岸线和浅海等复杂海面状况的激光成像模型建立,实现水深测量,涵盖了双偏振机载光子计数激光雷达的特殊需求,提供精确的水深探测和成像模型,并通过精确的数据分析和实验验证了该方法的有效性,增强了在此方面研究的探索性。
2、本发明可通过以下技术方案实现:
3、一种基于光线追踪的双偏振光子计数测深激光雷达成像方法,依据激光雷达中反射镜和激光器的关系以及激光雷达在飞行器上的飞行方向,建立本体坐标系,再将本体坐标系旋转指定角度获取过渡坐标系,然后依据本体坐标系和过渡坐标系之间的转换关系,计算本体坐标系下陆地或者水面的各个位置点对应的坐标值p,获取激光成像对应的点云数据;
4、当水面平静时,以激光天底角替代水面入射角,再结合激光的水中折射角、激光在水中和空气中的斜距,修正坐标值p,以获得水中的各个位置点对应的坐标值q,获取激光成像对应的点云数据;
5、当水面不平静有风浪时,以入射光线的单位向量以及水面切面的单位法向量计算水面入射角,再结合激光的水中折射角、激光在水中和空气中的斜距,修正坐标值p,以获得水中的各个位置点对应的坐标值q,获取激光成像对应的点云数据。
6、进一步,利用如下公式计算坐标值p,
7、
8、其中,φ表示激光雷达中的码盘转角,激光雷达中电机转轴与入射光的夹角α=45°,激光雷达中反射镜与电机转轴法线夹角β=7.5°,r表示激光雷达中测距系统的测距值,a=sinβ,b=sinα,c=cosβ;
9、利用如下公式计算坐标值q,
10、
11、
12、其中,l、l分别为激光在空气中和水中的斜距,i表示激光的水面入射角,表示激光的水中折射角。
13、进一步,当水面不平静有风浪时,利用如下公式计算激光的水面入射角i,
14、
15、其中,表示入射光线的单位向量,(xpc,ypc,zpc)表示坐标值p对应的地理坐标值pc,
16、表示水面切面的单位法向量,
17、
18、式中,εj表示波浪的初相,ζj表示波浪的振幅,τj表示波浪的方向角,wj表示角频率,g=9.8m/s2,m表示余弦波叠加次数,ts表示周期。
19、进一步,利用如下公式计算地理坐标值pc,
20、
21、式中,rimu表示安置角旋转矩阵,(△x,△y,△z)t表示偏心分量,re表示姿态角的旋转矩阵,rw表示由局部地理坐标系转到wgs-84坐标系下的旋转矩阵,rc表示由wgs-84坐标系转到cgcs2000坐标系的旋转矩阵,表示gps天线相位中心在wgs-84系下的坐标,(t1,t2,t3)t表示由wgs-84坐标系转至cgcs2000坐标系的平移参量。
22、进一步,当水面平静时,利用如下公式计算激光的水面入射角i,
23、
24、进一步,结合折射改正模型中的snell定理,利用如下公式计算水中折射角
25、
26、式中,nw表示水的折射率,na表示空气的折射率,cw表示光子在水中的传播速度,ca表示光子在空气中的传播速度,t表示激光发射到接收所需的时间,l和l分别表述激光在空气中与水下的斜距。
27、进一步,所述激光雷达设置水平偏振通道和垂直偏振通道,通过水平偏振通道采集的数据用于水面或者陆地上各个位置点的激光成像计算,通过垂直偏振通道采集的数据用于水中各个位置点的激光成像计算。
28、本发明有益的技术效果在于:
29、针对双偏振机载光子计数激光雷达原始观测数据,将水平偏振通道采集的观测数据用于水面或者陆地上各个位置点的激光成像计算,垂直偏振通道采集的数据用于水中各个位置点的激光成像计算,实现物理筛选,为提高激光成像计算精度提供物理基础;
30、依据激光雷达以及其在飞行器上的飞行方向构建本体坐标系,再旋转构建过渡坐标系,然后利用两者之间的关系,计算本体坐标系下陆地或者水面的各个位置点对应的坐标值p,最后分水面平静和不平静两种情况通过折射校正坐标值p,以获取水中各个位置点对应的坐标值q,从而建立水上下一体三维点云成像模型,较现有常规成像方法,本发明的成像方法可以实现高精度的地形成像需求,实用性更强。
技术特征:
1.一种基于光线追踪的双偏振光子计数测深激光雷达成像方法,其特征在于:依据激光雷达中反射镜和激光器的关系以及激光雷达在飞行器上的飞行方向,建立本体坐标系,再将本体坐标系旋转指定角度获取过渡坐标系,然后依据本体坐标系和过渡坐标系之间的转换关系,计算本体坐标系下陆地或者水面的各个位置点对应的坐标值p,获取激光成像对应的点云数据;
2.根据权利要求1所述的基于光线追踪的双偏振光子计数测深激光雷达成像方法,其特征在于:利用如下公式计算坐标值p,
3.根据权利要求2所述的基于光线追踪的双偏振光子计数测深激光雷达成像方法,其特征在于:当水面不平静有风浪时,利用如下公式计算激光的水面入射角i,
4.根据权利要求3所述的基于光线追踪的双偏振光子计数测深激光雷达成像方法,其特征在于:利用如下公式计算地理坐标值pc,
5.根据权利要求2所述的基于光线追踪的双偏振光子计数测深激光雷达成像方法,其特征在于:当水面平静时,利用如下公式计算激光的水面入射角i,
6.根据权利要求2所述的基于光线追踪的双偏振光子计数测深激光雷达成像方法,其特征在于:结合折射改正模型中的snell定理,利用如下公式计算水中折射角
7.根据权利要求1所述的基于光线追踪的双偏振光子计数测深激光雷达成像方法,其特征在于:所述激光雷达设置水平偏振通道和垂直偏振通道,通过水平偏振通道采集的数据用于水面或者陆地上各个位置点的激光成像计算,通过垂直偏振通道采集的数据用于水中各个位置点的激光成像计算。
技术总结
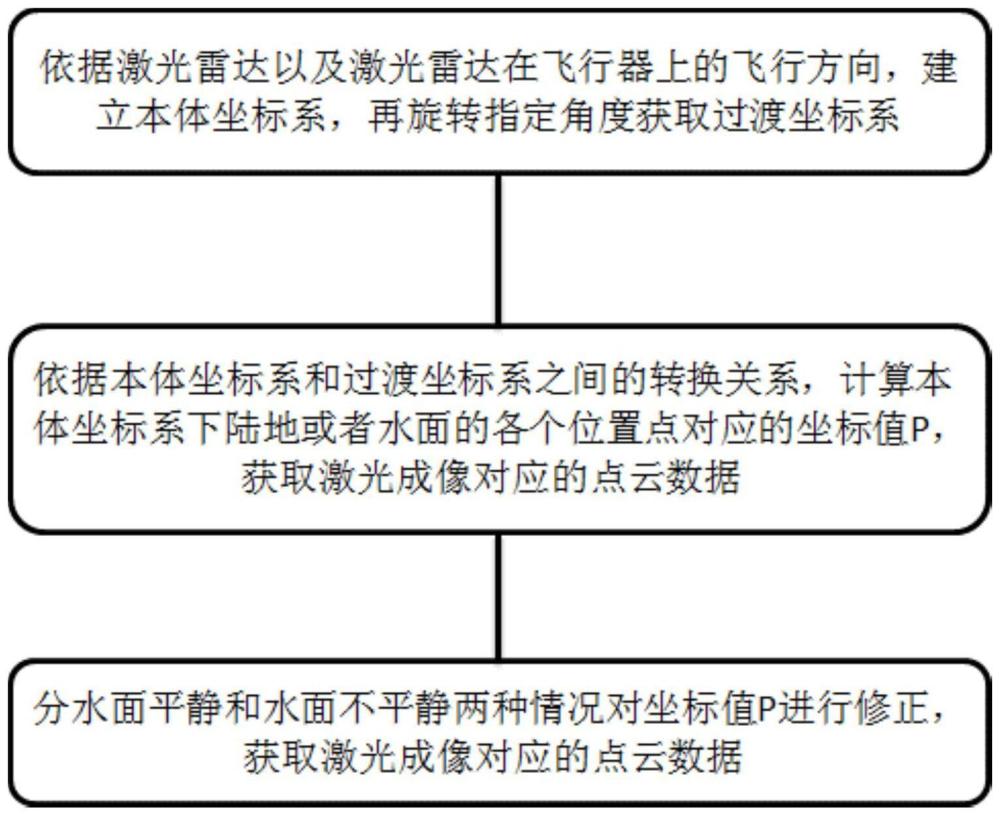
本发明公开了一种基于光线追踪的双偏振光子计数测深激光雷达成像方法,依据激光雷达以及其在飞行器上的飞行方向,建立本体坐标系,再旋转指定角度获取过渡坐标系,然后依据两个坐标系之间的转换关系,计算本体坐标系下陆地或者水面的各个位置点对应的坐标值P,获取激光成像对应的点云数据;当水面平静时,以激光天底角替代水面入射角,再结合激光的水中折射角、激光在水中和空气中的斜距,修正坐标值P,以获得水中的各个位置点对应的坐标值Q,获取激光成像对应的点云数据;当水面不平静有风浪时,以入射光线的单位向量以及水面切面的单位法向量计算水面入射角,再结合激光的水中折射角、激光在水中和空气中的斜距,修正坐标值P,以获得水中的各个位置点对应的坐标值Q,获取激光成像对应的点云数据。
技术研发人员:栾奎峰,赵雪燕,李莹春,邱振戈,郑金惠,张立哲,朱卫东,胡健聪
受保护的技术使用者:上海海洋大学
技术研发日:
技术公布日:2024/5/10
- 还没有人留言评论。精彩留言会获得点赞!