一种分布式雷达光电系统方位俯仰误差联合标校方法与流程
本发明适用于反无人机领域。
背景技术:
1、雷达和光电各有各的特点,雷达空域警戒搜索、发现目标的能力强,光电的目标跟踪精度高、数据率高并可获取目标的图像信息,雷达发现目标后引导光电进行跟踪成像的场景非常多。对于分布式部署的雷达光电设备,雷达和光电设备之间往往存在一定的安装间距,雷达和光电之间安装误差会因安装间距的存在而在探测空间范围内放大,且偏差在空间范围内不是定值,若不进行恰当的处理,会出现雷达引导光电无法进入视场的情况;同时,由于光电设备的测量精度比较高,如果两个设备的安装底座的同方向水平一致度不够高,即使不考虑安装间距的影响,也会出现雷达引导光电探测目标无法顺利跟踪进入视场的情况;还会出现在某个特定方位雷达引导光电可以进入视场,而其他方向雷达无法引导目标进入光电视场的情况,这是安装基座水平程度不一致造成的雷达和光电设备的探测俯仰没有在方位360度范围内对齐造成的。综合以上两种因素,针对分布式部署的雷达光电系统,在基座水平一致性无法保证0.1°以下的情况,为保证雷达引导光电顺利进入视场,需要想办法对雷达和光电的探测数据进行修正。
2、目前的相关研究中,基本都是针对理想情况来研究雷达与光电的标定问题。《基于雷达光电联动系统的目标俯仰角获取方法和装置》专利致力于解决雷达与光电联动设备的俯仰角对齐问题,其主要聚焦了雷达与光电联动设备目标俯仰数据的通用的获取原理、方法和流程,这对于单个方位角的数据修正具有参考意义,但其没有涉及,在安装基座水平程度不一致的情况下,如何保证解决在360°方位范围内每个角度上都实现雷达与光电数据对齐的方法和流程。
技术实现思路
1、本发明提出了一种分布式雷达光电系统方位俯仰误差联合标校方法,以解决雷达、光电基座无法调整至完全水平的情况下,360°全方位范围内,实现雷达与光电数据对齐、雷达引导光电顺利进入视场的问题。
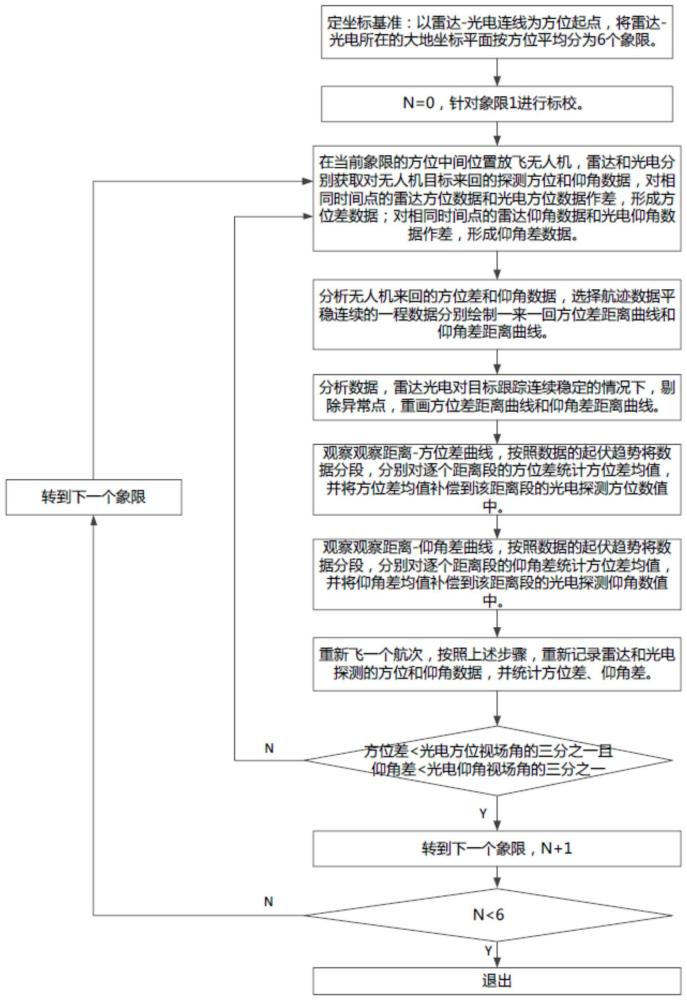
2、为实现上述目的,本发明的步骤如下:
3、第一步:将雷达和光电设备所在的方位空间分为6个象限;
4、第二步:逐个象限的标校数据,首先选择第一个象限进行标校,包括:
5、1)方位区间的中间位置30°方位方向放飞无人机,雷达和光电分别探测获取目标的探测方位和仰角值;目标飞行距离应从雷达盲区之后100米至光电最大探测威力的80%,分别记录远离设备所在位置和靠近设备所在位置两组数据;
6、2)在两组数据中选择平稳连续的的一组数据进行使用。首先去除异常点,再进行误差统计。统计方法为:
7、按照雷达的转速记录雷达航迹和光电航迹数据,假设雷达转速为ts,记录数据点数为n,雷达探测获取的方位为θrn,仰角为βrn,光电探测获取的方位为θpn,仰角为βpn,方位差记为△θn和仰角差记为△βn,n∈[1,n];
8、△θn=θrn-θpn
9、△βn=βrn-βpn
10、r∈[ts,ts*n]
11、3)分别画出距离-方位差(r,△θn)曲线和距离-仰角差(r,△βn)曲线;
12、4)将比周围数据相差超过0.5的数据记为异常点,将异常点的值改为和前一个数据点相同,并重新画出距离-方位差(r,△θn)曲线和距离-仰角差(r,△βn)曲线;
13、5)对方位数据进行分段、统计和修正,具体方法如下:
14、先观察距离-方位差(r,△θn)曲线,按照数据的起伏趋势将数据分段,一共将n个数据分为k段,段序记为k,k∈[1,k],每段的数据点数记为nk,段内的数据序号记为nk,每段的方位差值数据记为△θnk。计算每段内的雷达光电的方位差均值为k∈[1,k];
15、假设在本象限内各距离段光电的常态方位探测数据为逐个距离段对光电方位进行修正,修正后的数据记为:
16、6)对仰角差数据进行分段、统计和修正,具体方法如下:
17、在观察距离-仰角差(r,△βn)曲线,按照数据的起伏趋势将数据分段,一共将n个数据分为k段,段序记为k,k∈[1,k],每段的数据点数记为nk,段内的数据序号记为nk,每段的仰角差值数据记为△βnk。计算每段内的雷达光电的仰角差均值为k∈[1,k];
18、假设在本象限内各距离段光电的常态仰角探测数据为逐个距离段对光电仰角进行修正,修正后的数据记为:
19、第三步:重新飞一个航次,按照第二步1)~3)来统计雷达和光电之间的方位误差和仰角误差,并计算方位差均值和仰角差均值。如果二者之间的方位差均值低于光电方位视场角的三分之一,且仰角差均值低于光电方位视场角的三分之一,当前象限的标校结束转第四步;否则转第二步;
20、第四步:分别在象限2~6的方位中间位置放飞无人机,重复第二、第三步,完成当前象限的数据测量、计算和修正。
21、进一步的,所述第一步按照雷达和光电设备各自的安装位置的连线作为基准,全空域在方位上平均分为6个象限进行数据测量,每个象限按照同一组修正值进行修正;以光电、雷达射线所在一端作为标校点方位0位,以雷达、光电射线所在一端作为的标校点方位3位,以雷达所在的直线为起点,雷达起始顺时针方向60°标记为方位1位,雷达起始顺时针方向120°标记为方位2位,雷达起始顺时针方向240°标记为方位4位,雷达起始顺时针方向300°标记为方位5位;分别形成1~6共6个象限,象限1:0-60°,象限2:60°-120°,象限3:120°-180°,象限4:180°-240°,象限5:240°-300°,象限6:300°-360°。
22、进一步的,所述第二步中,在靠近设备和远离设备两组数据中选择更加平稳连续的的一组数据使用,挑选方法为选择雷达航迹丢失率小于10%且光电航迹丢失率小于10%的数据进行使用,若都达不到,需要重新放飞无人机获取数据;航迹丢失率的计算方法为:飞行距离段内应有的数据点数记为n_all,实际记录的航迹数据点数n_track,航迹丢失率track-loss-rate的求法为:track-loss-rate=(n_all-n_track)/n_all。
23、进一步的,所述第二步中,在距离上按照距离-方位差曲线和距离-仰角差的分布分段进行统计数据计算差值,方位差或仰角差起伏差值超过0.3度的数据分为一段。
24、本发明针对安装位置有一定间距的雷达、光电联动系统,在基座水平一致性无法保证0.1°以下的情况,提出了具体的工程化标校方法,保证了雷达引导光电顺利进入视场。本发明成功解决了工程中分开布置的雷达、光电平坦度条件受限情况下设备的标校问题,具有工程应用价值。
技术特征:
1.一种分布式雷达光电系统方位俯仰误差联合标校方法,其特征在于:
2.根据权利要求1所述一种分布式雷达光电系统方位俯仰误差联合标校方法,其特征在于:在方位上将空间范围平均分为6个象限,每个象限按照同一组修正值进行修正;以光电、雷达连线中心为原点,以光电、雷达射线所在一端作为标校点方位0位,按照逆时针方向按60°为一个象限将整个方位平面分为6个象限,分别形成1~6共6个象限,象限1:0-60°,象限2:60°-120°,象限3:120°-180°,象限4:180°-240°,象限5:240°-300°,象限6:300°-360°。
3.根据权利要求1所述一种分布式雷达光电系统方位俯仰误差联合标校方法,其特征在于:所述第二步中,两组数据中选择一组数据的选择方法包括:
4.根据权利要求1所述一种分布式雷达光电系统方位俯仰误差联合标校方法,其特征在于:所述第二步中,在距离上按照距离-方位差曲线和距离-仰角差的分布分段进行统计数据计算差值,方位差或仰角差起伏差值超过0.3度的数据分为一段。
技术总结
本发明提出了一种分布式雷达光电系统方位俯仰误差联合标校方法,适用于反无人机领域。本发明将雷达光电所在的平面方位空间分为6个象限,逐个象限进行标校,在每个方位象限的中间位置放飞无人机,统计雷达和光电的探测方位数据和仰角数据,计算二者之间的方位差和仰角差,分别根据方位差曲线和仰角差曲线的起伏情况将数据分为若干距离段,逐个距离段计算方位差均值和仰角差均值,再逐个距离段标定方位和仰角。标定后的全程数据的方位差和仰角差低于光电方位视角的三分之一,判为合格,否则需要重新标校。
技术研发人员:石春燕,宋虎,江晓竹,王雪琦,吴竞超
受保护的技术使用者:中国船舶集团有限公司第七二四研究所
技术研发日:
技术公布日:2024/3/31
- 还没有人留言评论。精彩留言会获得点赞!