一种低功耗定位设备离散位置信息的收敛方法与流程
本发明属于定位设备,特别涉及一种低功耗定位设备离散位置信息的收敛方法。
背景技术:
1、随着低功耗定位设备的广泛应用,研究如何在极低功耗的情况下获取位置信息已成为行业关注的重要技术,但是定位设备中的定位模块在定位成功到定位收敛需要一定的时间,然而在这段时间开着二代模块则功耗较大,如图4所示,传统的低功耗定位设备进行位置上报,首先是打开北斗定位模块rn,等待其定位成功,定位成功后获取到位置信息,关闭北斗定位模块rn,然后直接进行位置信息上报或者,这样上报的位置信息由于没有进行收敛,会导致数据飘点严重,即开始取点时精度较差并造成位置偏差较大,因此,亟需研发一种防止数据飘点的低功耗定位设备离散位置信息的收敛方法。
技术实现思路
1、(一)要解决的技术问题
2、为了克服上述传统低功耗定位设备进行位置上报时存在着数据飘点的情况,本发明提供一种防止数据飘点的低功耗定位设备离散位置信息的收敛方法。
3、(二)技术方案
4、本发明通过如下技术方案实现:本发明提出了一种低功耗定位设备离散位置信息的收敛方法,包括如下步骤:
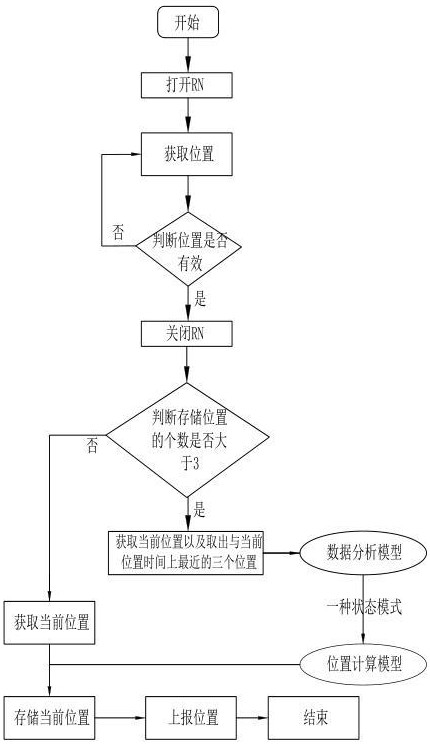
5、a)开始,进入下一个步骤;
6、b)打开北斗定位模块rn,进入下一个步骤;
7、c)通过北斗定位模块rn获取位置,进入下一个步骤;
8、d)判断位置是否有效,可以直接通过输出的字段获取到位置的有效值,是,进入下一个步骤,否,则跳转到步骤c);
9、e)关闭北斗定位模块rn,进入下一个步骤;
10、f)判断存储位置的个数是否大于3,是,则进入下一个步骤,否,则跳转到步骤h);
11、g)通过北斗定位模块rn获取当前位置以及取出与当前位置时间上最近的三个位置,跳转到步骤i);
12、h)通过北斗定位模块rn获取当前位置,跳到步骤k);
13、i)进入数据分析模型,获取到一种状态模式,状态模式为启动模式或者高速模式或者低速模式或者静态模式的一种,进入下一个步骤;
14、其中,数据分析模型获取到状态模式的实现流程步骤为:
15、(一)计算当前位置与三个位置中的时间差值,获取最小时间差值以及关于最小时间差值的一个位置,进入下一个步骤;
16、(二)判断最小时间差值是否大于20分钟,否,则进入下一个步骤,是则跳转到步骤(十);
17、(三)通过当前位置速度值和最小时间差值计算出预测距离值l1,其中,计算公式为 l1 = v×t,v为当前位置速度值,当前位置速度值由北斗定位模块rn获取,t是最小时间差值,进入下一个步骤;
18、(四)计算当前位置与关于最小时间差值的一个位置的实际距离值l2,进入下一个步骤;
19、(五)判断l1-l2的绝对值是否小于等于l2×0.2,是,则进入下一个步骤,否,则跳转到步骤(八);
20、(六)判断当前位置速度值是否小于20m/s,是,则进入下一个步骤,否则跳转到步骤(十一);
21、(七)判断当前位置速度值是否小于3m/s,是,则跳转到步骤(十三),否,则跳转到步骤(十二);
22、(八)计算当前位置与关于最小时间差值的一个位置的速度差值,关于最小时间差值的一个位置的速度由北斗定位模块rn获取,进入下一个步骤;
23、(九)判断当前速度差值是否大于10m/s,否,则进入下一个步骤,是,跳转到步骤(六);
24、(十)输出启动模式;
25、(十一)输出高速模式;
26、(十二)输出低速模式;
27、(十三)输出静态模式;
28、j)根据位置计算模型,更新当前位置,进入下一个步骤;
29、计算模型计算方法为:
30、1st):输入一种状态模式:
31、启动模式,跳转到步骤2nd);
32、高速模式,跳转到步骤3rd);
33、低速模式,跳转到步骤4th);
34、静态模式,跳转到步骤5th);
35、2nd):清除所有存储位置,跳到步骤3rd)
36、3rd):给下述参数赋值:
37、m=1,m1=0,m2=0,m3=0,跳转到步骤6th);
38、4th):给下述参数赋值:
39、m=0.8,m1=0.1,m2=0.05,m3=0.05,跳转到步骤6th);
40、5th):给下述参数赋值:
41、m=0.4,m1=0.3,m2=0.2,m3=0.1,跳转到步骤6th);
42、6th):进行公式计算,并且更新当前位置lat和lon,其中公式如下所示:
43、;
44、;
45、其中,lat 代表当前的纬度值,lon代表当前的经度值;
46、lati代表的之前第i个位置的纬度值,loni代表的之前第i个位置的经度值;
47、m以及mi代表不同状态模式的参数值;
48、k)存储当前位置,进入下一个步骤;
49、l)上报位置,进入下一个步骤;
50、m)结束。
51、(三)有益效果
52、本发明相对于现有技术,具有以下有益效果:
53、本发明中主要是针对低功耗场景下通过固定时间开启定位模块获取到位置信息进行的一种收敛方法,本发明通过数据分析模型,再进行位置计算模型重新计算,获取到较为收敛的位置信息进发送,比较传统的方法,直接将处理的位置信息进行发送的好处是位置信息较为收敛,在静止的时候不会因为开始取点时精度较差导致位置偏差较大。
技术特征:
1.一种低功耗定位设备离散位置信息的收敛方法,
技术总结
本发明属于定位设备技术领域,特别涉及一种低功耗定位设备离散位置信息的收敛方法,包括如下步骤:a)开始,进入下一个步骤;b)打开北斗定位模块RN,进入下一个步骤;c)通过北斗定位模块RN获取位置,进入下一个步骤;d)判断位置是否有效,可以直接通过输出的字段获取到位置的有效值等。本发明中主要是针对低功耗场景下通过固定时间开启定位模块获取到位置信息进行的一种收敛方法,本发明通过数据分析模型,再进行位置计算模型重新计算,获取到较为收敛的位置信息进发送,比较传统的方法,直接将处理的位置信息进行发送的好处是位置信息较为收敛,在静止的时候不会因为开始取点时精度较差导致位置偏差较大。
技术研发人员:朱孙鹏,杨江民,颜建来,杨华炜
受保护的技术使用者:福建福大北斗通信科技有限公司
技术研发日:
技术公布日:2024/2/21
- 还没有人留言评论。精彩留言会获得点赞!