一种无人机导航方法、系统、设备和存储介质与流程
本发明涉及无人机导航,尤其是涉及一种无人机导航方法、系统、设备和存储介质。
背景技术:
1、随着科技的发展,无人机应用逐渐走入了各行各业,尤其在电力输电线路运维方面,应用无人机进行线路巡检,能够提供线路巡检的质量和效率,保证电网的安全稳定运行。
2、然而,输电线路分布区域地形复杂,手动操作无人机依旧难以实现全面巡视,存在许多巡视盲区。为了解决这些问题,无人机全自动线路巡检应运而生。全自动巡检模式下,对无人机定位精度提出了更严格的要求。
3、在现有技术中,无人机通常依赖gps信号进行大范围的定位导航,但在某些环境下,如山区峡谷或森林遮挡严重的地方,gps信号可能不稳定或不可用。此外,无人机上独立的视觉导航系统在复杂的光照条件或动态环境下也存在局限性。因此,亟需一种能够使无人机在各种环境下均能实时、精确进行飞行路径导航的方法。
技术实现思路
1、本发明的目的是提供一种无人机导航方法、系统、设备和存储介质,以解决现有技术中缺乏能够使无人机在各种环境下均能实时、精确进行飞行路径导航的技术问题。
2、本发明的目的,可以通过如下技术方案实现:
3、方案一,一种无人机导航方法,包括以下步骤:
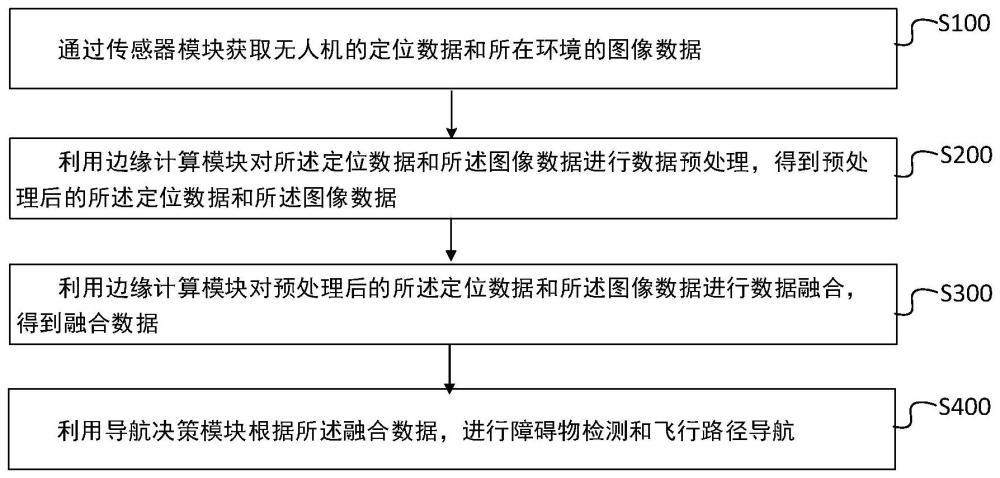
4、通过传感器模块获取无人机的定位数据和所在环境的图像数据;
5、利用边缘计算模块对所述定位数据和所述图像数据进行数据预处理,得到预处理后的所述定位数据和所述图像数据;
6、利用边缘计算模块对预处理后的所述定位数据和所述图像数据进行数据融合,得到融合数据;
7、利用导航决策模块根据所述融合数据,进行障碍物检测和飞行路径导航。
8、可选地,所述利用传感器模块获取无人机的定位数据和所在环境的图像数据,包括:
9、通过位置传感器获取无人机的定位数据;
10、通过视觉传感器获取所述无人机所在环境的图像数据。
11、可选地,所述利用边缘计算模块对所述定位数据和所述图像数据进行数据预处理,包括:
12、利用边缘计算模块对所述定位数据和所述图像数据进行时间戳对齐;
13、对对齐后的所述定位数据进行降噪处理;
14、对对齐后的所述图像数据进行特征增强,以提升特征识别的准确性;
15、对预设滑动时间窗口内的所述定位数据和所述图像数据进行加速处理,以降低数据的处理延迟。
16、可选地,所述对预设滑动时间窗口内的所述定位数据和所述图像数据进行加速处理,包括:
17、对预设的第一滑动时间窗口wtg={gt-k+1,...,gt}内的图像数据点进行求均值运算;
18、对预设的第二滑动时间窗口wtv={vt-k+1,...,vt}内的定位数据点进行求均值运算;
19、其中,所述第一滑动时间窗口为所述定位数据的滑动时间窗口,所述第二滑动时间窗口为所述图像数据的滑动时间窗口;wtg、wtv分别表示在时间点t的定位数据时间窗口、图像数据时间窗口;k是定位数据时间窗口、图像数据时间窗口的大小;gt、vt分别是时间点t的gps数据点、图像数据点;gt-k+1、vt-k+1分别是时间点t-k+1的gps数据点、图像数据点。
20、可选地,所述利用边缘计算模块对预处理后的所述定位数据和所述图像数据进行数据融合,包括:
21、利用边缘计算模块分别评估所述定位数据的信号强度和所述图像数据的清晰度;
22、根据所述信号强度和所述清晰度,计算所述定位数据的第一权重和所述图像数据的第二权重;
23、根据预处理后的所述定位数据、所述图像数据、所述第一权重和所述第二权重进行数据融合。
24、可选地,所述根据预处理后的所述定位数据、所述图像数据、所述第一权重和所述第二权重进行数据融合,包括:
25、利用下式进行数据融合:
26、d=g×wg+v×wv;
27、其中,d为融合数据,g为定位数据,wg为定位数据的第一权重,v为图像数据,wv为图像数据的第二权重,wg+wv=1。
28、可选地,所述根据预处理后的所述定位数据、所述图像数据、所述第一权重和所述第二权重进行数据融合之后,还包括:
29、根据所述信号强度和所述清晰度,动态调整所述第一权重和所述第二权重。
30、方案二,一种无人机导航系统,包括:
31、传感器模块,用于获取无人机的定位数据和所在环境的图像数据;
32、边缘计算模块,用于对所述定位数据和所述图像数据进行数据预处理,得到预处理后的所述定位数据和所述图像数据;对预处理后的所述定位数据和所述图像数据进行数据融合,得到融合数据。
33、方案三,一种计算机设备,包括:处理器和存储器;
34、其中,所述存储器存储计算机程序,所述处理器执行所述计算机程序时实现方案一所述的无人机导航方法的步骤。
35、方案四,一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现方案一所述的无人机导航方法的步骤。
36、基于上述技术方案,本发明带来的有益效果是:
37、本发明实施例通过传感器模块同时获取无人机的定位数据和所在环境的图像数据,在边缘计算环境中对定位数据和图像数据进行预处理,使用边缘计算环境中适用的优化算法优化预处理过程,能减少数据处理的复杂度,提高数据计算的速度和效率,减小数据处理的延迟,以保证无人机飞行路径导航时的实时性;然后再对两种数据进行数据融合得到融合数据,并利用融合数据进行障碍物检测和无人机的飞行路径导航,能够提高无人机在多种环境下的导航路径精度和实时性,使得无人机在各种实际环境中均能实时、精确地进行飞行路径导航。
技术特征:
1.一种无人机导航方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的无人机导航方法,其特征在于,所述利用传感器模块获取无人机的定位数据和所在环境的图像数据,包括:
3.根据权利要求1所述的无人机导航方法,其特征在于,所述利用边缘计算模块对所述定位数据和所述图像数据进行数据预处理,包括:
4.根据权利要求3所述的无人机导航方法,其特征在于,所述对预设滑动时间窗口内的所述定位数据和所述图像数据进行加速处理,包括:
5.根据权利要求1所述的无人机导航方法,其特征在于,所述利用边缘计算模块对预处理后的所述定位数据和所述图像数据进行数据融合,包括:
6.根据权利要求5所述的无人机导航方法,其特征在于,所述根据预处理后的所述定位数据、所述图像数据、所述第一权重和所述第二权重进行数据融合,包括:
7.根据权利要求5所述的无人机导航方法,其特征在于,所述根据预处理后的所述定位数据、所述图像数据、所述第一权重和所述第二权重进行数据融合之后,还包括:
8.一种无人机导航系统,其特征在于,包括:
9.一种计算机设备,其特征在于,包括:处理器和存储器;
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1至7中任一项所述的无人机导航方法的步骤。
技术总结
本发明公开了一种无人机导航方法、系统、设备和存储介质,其中方法包括以下步骤:通过传感器模块获取无人机的定位数据和所在环境的图像数据;利用边缘计算模块对定位数据和图像数据进行数据预处理,得到预处理后的定位数据和图像数据;利用边缘计算模块对预处理后的所述定位数据和所述图像数据进行数据融合,得到融合数据;利用导航决策模块根据融合数据,进行障碍物检测和飞行路径导航。本发明能够提高无人机在多种环境下的导航路径精度和实时性,在各种实际环境中均能实时、精确地进行飞行路径导航。
技术研发人员:肖铭杰,李一贤,叶洪江,陆海应,王晓聪,何治安,陈创升,马永龙,游亚雄,骆杰平,钟振芳,杨智泉
受保护的技术使用者:广东电网有限责任公司广州供电局
技术研发日:
技术公布日:2024/4/24
- 还没有人留言评论。精彩留言会获得点赞!