一种基于声信号脉冲特征的船舶局部空化状态判别方法与流程
本发明涉及空化状态判断领域,尤其是一种基于声信号脉冲特征的船舶局部空化状态判别方法。
背景技术:
1、空化起始是衡量船舶安静航行性能的重要指标,目前空化起始的判断主要依靠视觉观察或者声信号频谱特征两种方式。但是视觉观察一般只在试验室条件下具备条件,实际船舶航行过程则需要较为复杂的设备和配套工艺,而传统的声信号频谱特征则只能反映信号的总体特征,需要不同工况频谱结果存在明显差别时方能确认空化的出现,而对于较为关心的临界状态往往无法给出确切结论,极大影响了空化起始判断的准确性和有效性,无法准确判断实船螺旋桨、附体等局部空化状态。
技术实现思路
1、本发明人针对上述问题及技术需求,提出了一种基于声信号脉冲特征的空化状态判别方法,本发明的技术方案如下:
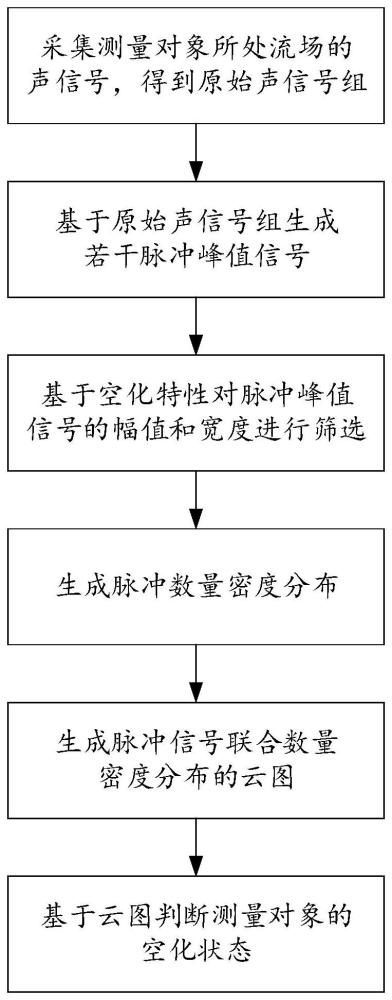
2、一种基于声信号脉冲特征的船舶局部空化状态判别方法,包括将船舶一预设的局部配置为测量对象,在预设时间内对测量对象所处流场的声信号进行采集,以在声信号采集后得到包含若干原始声信号poriginal(t)的原始声信号组;
3、基于原始声信号组生成若干脉冲峰值信号;
4、对于任一脉冲峰值信号,基于空化特性对脉冲峰值信号进行筛选,以筛选得到与筛选条件适配的筛选脉冲峰值信号,其中,脉冲峰值信号的筛选条件包括脉冲峰值信号的幅值和宽度;
5、基于上述的筛选脉冲峰值信号生成筛选脉冲峰值信号组,且基于筛选脉冲峰值信号组生成与筛选脉冲峰值信号组对应的脉冲数量密度分布;
6、基于筛选脉冲峰值信号组以及脉冲数量密度分布,生成脉冲信号联合数量密度分布的云图,并基于所述云图判断测量对象的空化状态。
7、其进一步技术方案为,测量对象的空化状态包括空化起始以及空化的发展状态;
8、所述测量对象发生空化时,所述云图中包括若干脉冲波纹,且脉冲波纹在云图中的形态与空化的发展状态相对应;
9、基于所述云图判断测量对象的空化状态时,基于脉冲波纹的首次出现进行空化起始的判断,基于脉冲波纹的形态判断空化的发展状态。
10、其进一步技术方案为,所述基于原始声信号组生成若干脉冲峰值信号的方法包括:
11、s1、对原始声信号组中的所有原始声信号poriginal(t)进行高通滤波,以得到若干高频特征信号phighpass(t);
12、s2、对所有高频特征信号phighpass(t)取绝对值,以生成若干正相位高频特征信号abs[phighpass(t)];
13、s3、对所有正相位高频特征信号abs[phighpass(t)]进行脉冲峰值信号提取,以生成若干脉冲峰值信号(pi,δti)。
14、其进一步技术方案为,步骤s1中高通滤波截止频率fhighcr的取值范围为1khz-5khz。
15、其进一步技术方案为,筛选脉冲峰值信号组中的任一筛选脉冲峰值信号满足:
16、
17、其中,pi为筛选脉冲峰值信号的幅值,δti为筛选脉冲峰值信号的宽度,pcrlow为筛选脉冲峰值信号的幅值阈值下限,tcrlow为筛选脉冲峰值信号的宽度阈值下限,tcrhigh为筛选脉冲峰值信号的宽度阈值上限;
18、所述筛选脉冲峰值信号的宽度阈值下限所述筛选脉冲峰值信号的宽度阈值上限其中,fs为原始声信号poriginal(t)的采样频率。
19、其进一步技术方案为,获取筛选脉冲峰值信号的幅值阈值下限pcrlow时,对所有原始声信号poriginal(t)进行低通滤波,以获得若干低频特征信号plowpass(t),其中,
20、低通滤波的截止频率flowcr与高通滤波的截止频率fhighcr相等;
21、将所有低频特征信号plowpass(t)幅值的平均值作为筛选脉冲峰值信号的幅值阈值下限pcrlow。
22、其进一步技术方案为,所述原始声信号组的采样频率fs≥200khz。
23、其进一步技术方案为,判断测量对象的空化状态时,还包括确定空化起始时测量对象的空化起始工况参数,其中,
24、判断测量对象空化状态的同时,实时记录测量对象的对应工况参数,计算空化起始时刻的对应工况参数与空化起始前一时刻对应工况参数的均值,并将所述均值作为空化起始工况参数。
25、其进一步技术方案为,所述测量对象为螺旋桨或船舶附体,其中,
26、当所述测量对象为螺旋桨时,所述工况参数为螺旋桨的转速n;
27、当所述测量对象为船舶附体时,所述工况参数为船舶的航速v。
28、其进一步技术方案为,在预设时间内,利用传感器以时域信号形式采集声信号,所述传感器的响应频率≥100khz,且所述传感器包括水听器。本发明的有益技术效果是:
29、本发明以时域形式采集的原始声信号组为基础,基于原始声信号组生成若干脉冲峰值信号,并同时对脉冲峰值信号的幅值和宽度进行筛选,从而获得与空化特性相匹配的脉冲数量密度分布,并利用脉冲信号联合数量密度分布的云图判断空化状态。本发明适用于各种环境条件下空化起始的声信号判断,解决了临界状态空化是否存在难以有效判断的问题,提高了空化起始判断的准确性以及有效性,可为实船螺旋桨、附体等局部空化状态的判断提供技术支撑。
技术特征:
1.一种基于声信号脉冲特征的船舶局部空化状态判别方法,其特征在于,
2.根据权利要求1所述的基于声信号脉冲特征的船舶局部空化状态判别方法,其特征在于,测量对象的空化状态包括空化起始以及空化的发展状态;
3.根据权利要求1所述的基于声信号脉冲特征的船舶局部空化状态判别方法,其特征在于,所述基于原始声信号组生成若干脉冲峰值信号的方法包括:
4.根据权利要求3所述的基于声信号脉冲特征的空化状态判别方法,其特征在于,步骤s1中高通滤波截止频率fhighcr的取值范围为1khz-5khz。
5.根据权利要求4所述的基于声信号脉冲特征的船舶局部空化状态判别方法,其特征在于,筛选脉冲峰值信号组中的任一筛选脉冲峰值信号满足:
6.根据权利要求5所述的基于声信号脉冲特征的船舶局部空化状态判别方法,其特征在于,获取筛选脉冲峰值信号的幅值阈值下限pcrlow时,对所有原始声信号poriginal(t)进行低通滤波,以获得若干低频特征信号plowpass(t),其中,
7.根据权利要求5所述的基于声信号脉冲特征的船舶局部空化状态判别方法,其特征在于,所述原始声信号组的采样频率fs≥200khz。
8.根据权利要求1所述的基于声信号脉冲特征的船舶局部空化状态判别方法,其特征在于,判断测量对象的空化状态时,还包括确定空化起始时测量对象的空化起始工况参数,其中,
9.根据权利要求8所述的基于声信号脉冲特征的船舶局部空化状态判别方法,其特征在于,所述测量对象为螺旋桨或船舶附体,其中,
10.根据权利要求1-9任一项所述的基于声信号脉冲特征的船舶局部空化状态判别方法,其特征在于,在预设时间内,利用传感器以时域信号形式采集声信号,所述传感器的响应频率≥100khz,且所述传感器包括水听器。
技术总结
本发明公开了一种基于声信号脉冲特征的船舶局部空化状态判别方法,涉及空化状态判断领域,将船舶一预设的局部配置为测量对象,在预设时间内对测量对象所处流场的声信号进行采集,以在声信号采集后得到包含若干原始声信号的原始声信号组;基于原始声信号组生成若干脉冲峰值信号;对于任一脉冲峰值信号,基于空化特性对脉冲峰值信号进行筛选,以得到筛选脉冲峰值信号;基于上述的筛选脉冲峰值信号生成筛选脉冲峰值信号组,且基于筛选脉冲峰值信号组生成脉冲数量密度分布;基于筛选脉冲峰值信号组以及脉冲数量密度分布,生成脉冲信号联合数量密度分布的云图,并基于所述云图判断测量对象的空化状态,该方法提高了空化起始判断的准确性和有效性。
技术研发人员:曹彦涛,翟树成,周剑,许影博
受保护的技术使用者:中国船舶科学研究中心
技术研发日:
技术公布日:2024/5/6
- 还没有人留言评论。精彩留言会获得点赞!