协作机器人关节刚度测试方法与流程
本发明涉及刚度测试,特别是涉及一种协作机器人关节刚度测试方法。
背景技术:
1、随着机器人技术不断发展以及智能制造不断普及,传统工业机器人和新一代协作机器人也成为了制造业行业的焦点。其中,协作机器人凭借着安全、易用、灵活、低投入、快速生产的特点,被越来越多的制造商引入到了生产制造中。
2、其中,关节是协作机器人的重要组成部分,关节的刚度指标也很大程度的影响协作机器人的整机的动静态性能。因此,对协作机器人关节刚度指标的评估显的尤为重要。
3、目前对关节刚度测试时,通常需要搭建比较精密的工装,在关节组成完毕后,单独进行测量,此种方法操作比较复杂,且测试成本较高。
技术实现思路
1、本发明要解决的技术问题是提供一种测试方法简单、成本低的协作机器人关节刚度测试方法。
2、本发明协作机器人关节刚度测试方法,包括以下步骤:
3、s10,利用现有关节臂和关节搭建测试模型,测试模型包括大臂和与大臂连接的二轴关节;
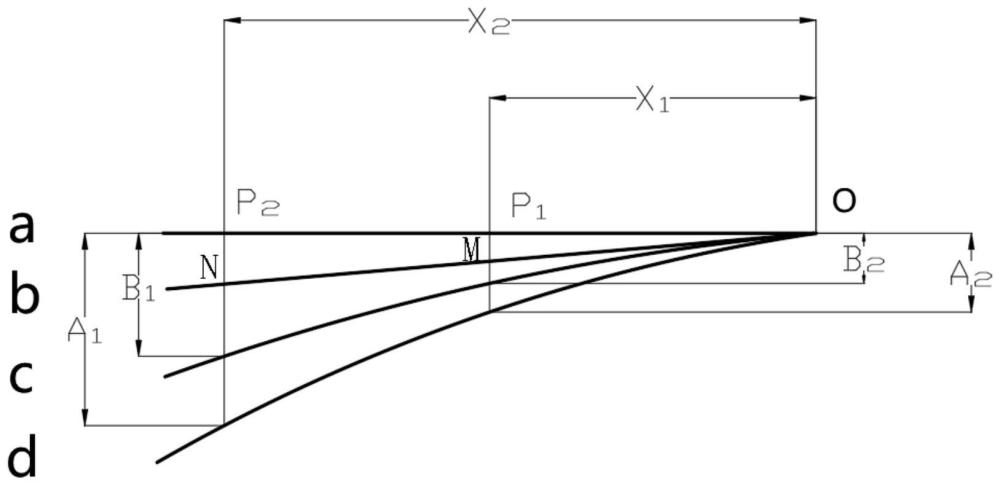
4、s20,在大臂上放置质量为m的负载,在大臂上选取p1、p2两点,记录两点位置距离二轴关节轴线的距离x1和x2以及下落距离a1和a2;
5、s30,利用有限元软件,建立大臂的有限元仿真模型,将大臂与二轴关节的连接位置固定,模拟大臂在负载的作用下,p1点和p2点位移的位置,分别记为b1和b2;
6、s40,判断((a1-b1)/(a2-b2)-x1/x2)/(x1/x2)是否小于等于10%,若是则进行步骤s50,若不是,则返修优化步骤s20中测试的方法,提高测试的准确性,同时优化步骤s30的仿真模型,使仿真结果更加准确,然后继续进行步骤s40的判断;
7、s50,根据前面的所测的数据,求解二轴关节的刚度,二轴关节的刚度k=mg*x2/arctan((a2-b2)/x2)。
8、本发明协作机器人关节刚度测试方法,其中在所述p1点和p2点下方,分别布置第一位移传感器和第二位移传感器,并将传感器数值归零,用于记录两点的下落距离。
9、本发明协作机器人关节刚度测试方法,其中所述测试模型包括底座和腰部,底座和腰部通过一轴关节连接,腰部与大臂通过二轴关节连接。
10、本发明协作机器人关节刚度测试方法与现有技术不同之处在于,本发明协作机器人关节刚度测试方法的结构简单,可以利用现有机器人关节及关节臂,对关节刚度进行测试,不需要额外增加工装。本发明的方法基于有限元技术与实际测试相结合的方法,一方面能够有效的控制误差,是测试结果比较准确,另一方面无需额外设备,更加节约成本。本发明的方法操作简单,能够有效快速的测试关节的刚度。
11、下面结合附图对本发明的协作机器人关节刚度测试方法作进一步说明。
技术特征:
1.一种协作机器人关节刚度测试方法,其特征在于:包括以下步骤:
2.根据权利要求1所述的协作机器人关节刚度测试方法,其特征在于:在所述p1点和p2点下方,分别布置第一位移传感器和第二位移传感器,并将传感器数值归零,用于记录两点的下落距离。
3.根据权利要求1所述的协作机器人关节刚度测试方法,其特征在于:所述测试模型包括底座和腰部,底座和腰部通过一轴关节连接,腰部与大臂通过二轴关节连接。
技术总结
本发明协作机器人关节刚度测试方法涉及一种用于对关节刚度进行测试的方法。其目的是为了提供一种测试方法简单、成本低的协作机器人关节刚度测试方法。本发明协作机器人关节刚度测试方法包括以下步骤:S10,搭建测试模型;S20,在大臂上放置负载,在大臂上选取P<subgt;1</subgt;、P<subgt;2</subgt;两点,记录距离二轴关节轴线的距离X<subgt;1</subgt;和X<subgt;2</subgt;以及下落距离A<subgt;1</subgt;和A<subgt;2</subgt;;S30,建立大臂的有限元仿真模型,模拟大臂在负载的作用下,P<subgt;1</subgt;点和P<subgt;2</subgt;点位移的位置B<subgt;1</subgt;和B<subgt;2</subgt;;S40,判断((A<subgt;1</subgt;‑B<subgt;1</subgt;)/(A<subgt;2</subgt;‑B<subgt;2</subgt;)‑X<subgt;1</subgt;/X<subgt;2</subgt;)/(X<subgt;1</subgt;/X<subgt;2</subgt;)是否小于等于10%,若不是,则返修优化步骤S20中测试的方法,提高测试的准确性,同时优化步骤S30的仿真模型,使仿真结果更加准确,然后继续进行步骤S40的判断;S50,根据前面的所测的数据,求解二轴关节的刚度。
技术研发人员:赵伟良,李振国,周旭东,胡永丽,杨智恺,应高阳,齐高奇
受保护的技术使用者:珞石(北京)机器人有限公司
技术研发日:
技术公布日:2024/5/10
- 还没有人留言评论。精彩留言会获得点赞!