车辆的定位方法、装置、电子设备和存储介质与流程
本公开涉及定位技术,尤其是一种车辆的定位方法、装置、电子设备和存储介质。
背景技术:
1、在自动驾驶、辅助驾驶等领域,车辆通常基于高精地图(high definition map,简称:hdmap)和视觉(或激光)进行定位。但是,在城区场景下,道路结构复杂,路口众多,基于高精地图的定位方法对环境元素(或称对象,比如车道线、路沿、箭头、停止线等)精度、元素种类的要求较高,而高精地图的鲜度较低,更新速度远远赶不上城区的变化,容易导致实时感知结果与高精地图发生冲突,从而影响车辆的自动驾驶、辅助驾驶等智能驾驶系统的稳定性。
技术实现思路
1、本公开的实施例提供了一种车辆的定位方法、装置、电子设备和存储介质,可以提高如城区等复杂场景的定位有效性,从而提高车辆的智能驾驶系统的稳定性。
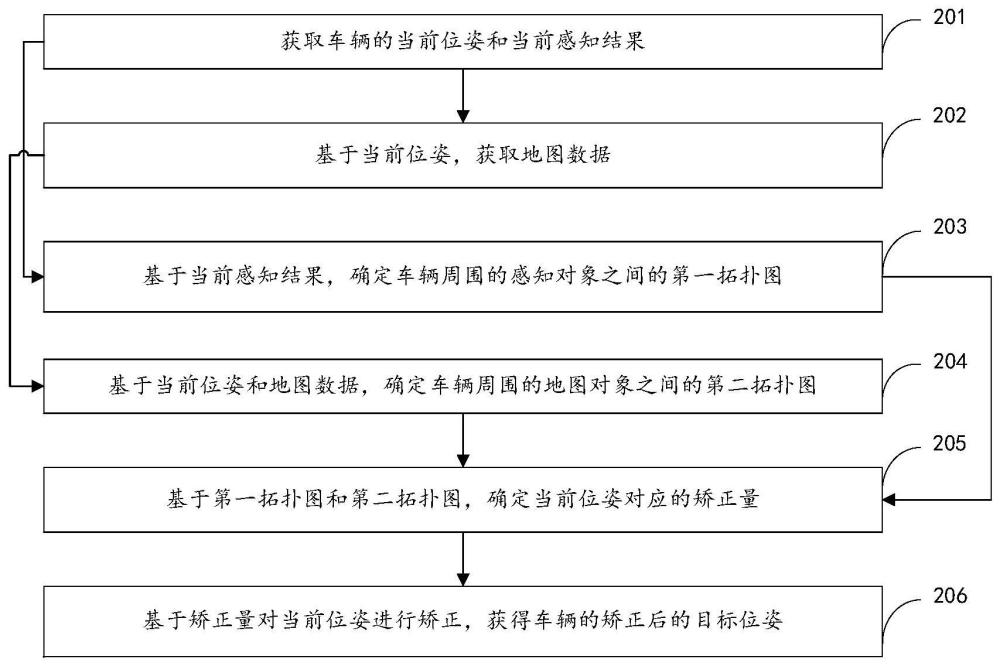
2、本公开的第一个方面,提供了一种车辆的定位方法,包括:获取车辆的当前位姿和当前感知结果;基于所述当前位姿,获取地图数据;基于所述当前感知结果,确定所述车辆周围的感知对象之间的第一拓扑图;基于所述当前位姿和所述地图数据,确定所述车辆周围的地图对象之间的第二拓扑图;基于所述第一拓扑图和所述第二拓扑图,确定所述当前位姿对应的矫正量;基于所述矫正量对所述当前位姿进行矫正,获得所述车辆的矫正后的目标位姿。
3、本公开的第二个方面,提供了一种车辆的定位装置,包括:获取模块,用于获取车辆的当前位姿和当前感知结果;第一处理模块,用于基于所述当前位姿,获取地图数据;第二处理模型,用于基于所述当前感知结果,确定所述车辆周围的感知对象之间的第一拓扑图;第三处理模块,用于基于所述当前位姿和所述地图数据,确定所述车辆周围的地图对象之间的第二拓扑图;第四处理模块,用于基于所述第一拓扑图和所述第二拓扑图,确定所述当前位姿对应的矫正量;第五处理模块,用于基于所述矫正量对所述当前位姿进行矫正,获得所述车辆的矫正后的目标位姿。
4、本公开的第三个方面,提供一种计算机可读存储介质,所述存储介质存储有计算机程序,所述计算机程序用于执行本公开上述任一实施例所述的车辆的定位方法。
5、本公开的第四个方面,提供一种电子设备,所述电子设备包括:处理器;用于存储所述处理器可执行指令的存储器;所述处理器,用于从所述存储器中读取所述可执行指令,并执行所述指令以实现本公开上述任一实施例所述的车辆的定位方法。
6、本公开的第五个方面,提供了一种计算机程序产品,当所述计算机程序产品中的指令被处理器执行时,执行本公开上述任一实施例提供的车辆的定位方法。
7、基于本公开上述实施例提供的车辆的定位方法、装置、电子设备和存储介质,可以获取车辆的当前位姿和当前感知结果,基于当前位姿可以获取地图数据,基于当前感知结果可以确定车辆周围的感知对象之间的第一拓扑图,基于当前位姿和地图数据可以确定车辆周围的地图对象之间的第二拓扑图,基于第一拓扑图和第二拓扑图可以确定当前位姿对应的矫正量,进而可以基于获得的矫正量对当前位姿进行矫正,获得车辆的矫正后的精确的目标位姿。由于采用的是地图对象的拓扑图,因此,通过普通地图即可获得,从而不依赖于高精地图,通过感知对象的第一拓扑图和地图对象的第二拓扑图确定当前位姿的矫正量,可以降低对环境对象精准度、及环境对象种类的要求,规避因高精地图的鲜度较低、更新速度较慢容易导致实时感知结果与高精地图发生冲突的问题,从而降低对车辆智能驾驶系统稳定性的不利影响,有助于提高智能驾驶系统的稳定性。
技术特征:
1.一种车辆的定位方法,包括:
2.根据权利要求1所述的方法,其中,所述第一拓扑图包括所述车辆周围的至少一个所述感知对象中各所述感知对象分别对应的第一节点、及各所述第一节点之间表示各所述感知对象之间连接关系的边;所述第二拓扑图包括所述车辆周围的至少一个所述地图对象中各所述地图对象分别对应的第二节点、及各所述第二节点之间表示各所述地图对象之间连接关系的边;
3.根据权利要求2所述的方法,其中,所述基于所述第一拓扑图和所述第二拓扑图,确定各所述第一节点分别对应的所述第二节点,包括:
4.根据权利要求2所述的方法,其中,所述基于各所述第一节点分别对应的所述感知对象的感知位姿、各所述第二节点分别对应的所述地图对象的地图位姿、及各所述第一节点分别对应的所述第二节点,确定各所述第一节点分别对应的位姿残差,包括:
5.根据权利要求1-4任一所述的方法,其中,所述基于所述当前感知结果,确定所述车辆周围的感知对象之间的第一拓扑图,包括:
6.根据权利要求5所述的方法,其中,所述基于所述当前感知结果,确定所述车辆的横向方向的第一预设感知对象之间的第一横向拓扑图,包括:
7.根据权利要求5所述的方法,其中,所述基于所述当前感知结果,确定所述车辆的纵向方向的第二预设感知对象之间的第一纵向拓扑图,包括:
8.根据权利要求5所述的方法,其中,所述基于所述当前位姿和所述地图数据,确定所述车辆周围的地图对象之间的第二拓扑图,包括:
9.根据权利要求1-4任一所述的方法,其中,还包括:
10.根据权利要求1-4任一所述的方法,其中,所述基于所述当前感知结果,确定所述车辆周围的感知对象之间的第一拓扑图,包括:
11.根据权利要求1-4任一所述的方法,其中,所述基于所述当前位姿和所述地图数据,确定所述车辆周围的地图对象之间的第二拓扑图,包括:
12.一种车辆的定位装置,包括:
13.一种计算机可读存储介质,所述存储介质存储有计算机程序,所述计算机程序用于执行上述权利要求1-11任一所述的方法。
14.一种电子设备,所述电子设备包括:
技术总结
本公开实施例公开了一种车辆的定位方法、装置、电子设备和存储介质,其中,方法包括:获取车辆的当前位姿和当前感知结果;基于所述当前位姿,获取地图数据;基于所述当前感知结果,确定所述车辆周围的感知对象之间的第一拓扑图;基于所述当前位姿和所述地图数据,确定所述车辆周围的地图对象之间的第二拓扑图;基于所述第一拓扑图和所述第二拓扑图,确定所述当前位姿对应的矫正量;基于所述矫正量对所述当前位姿进行矫正,获得所述车辆的矫正后的目标位姿。本公开实施例可以不依赖于高精地图,而是通过拓扑图实现车辆的精确定位,从而降低因高精地图更新速度慢等因素对车辆智能驾驶系统稳定性带来的不利影响,有助于提高智能驾驶系统的稳定性。
技术研发人员:李奕其,王峰,殷德全
受保护的技术使用者:上海安亭地平线智能交通技术有限公司
技术研发日:
技术公布日:2024/4/29
- 还没有人留言评论。精彩留言会获得点赞!