一种扫描测距定位系统及方法与流程
本申请涉及工业领域的距离测量、实时定位领域,尤其涉及一种扫描测距定位系统及方法。
背景技术:
1、随着工业自动化程度越来越高,智能化、自动化、数字化等概念相关的作业场景越来越普遍。
2、但现有技术中,对于大体积的物品在生产作业过程中的调整、移动、定位测距技术方案还不够完善,没有办法对其实现定位、测距、校对、调整的一体化解决方案。具体来说,在现有技术中,对物品进行定位和测距主要采用3d雷达扫描 和视觉识别等两种方式。但是3d雷达采用多轴模台,对物体全面扫描,其优点是整体扫描精度高,数据精确。但是扫描数据量大,扫描时间较长,从而导致整体作业效率低下。另一种视觉识别方式,其系统整体稳定性较差,而且容易受到外界环境因素影响(例如灰尘),导致数据精确度较低,从而应用的场景受到限制。
3、如何提供一种稳定、高效、精确的定位测距系统或者方法,来实现工业场景中的自动化、智能化升级,成为本行业急需解决的技术问题。
技术实现思路
1、本申请的目的在于提供一种扫描测距定位系统及方法,以解决上述背景技术中提出的问题。
2、为实现上述目的,本申请提供如下技术方案:
3、一种扫描测距定位方法,所述方法包括:
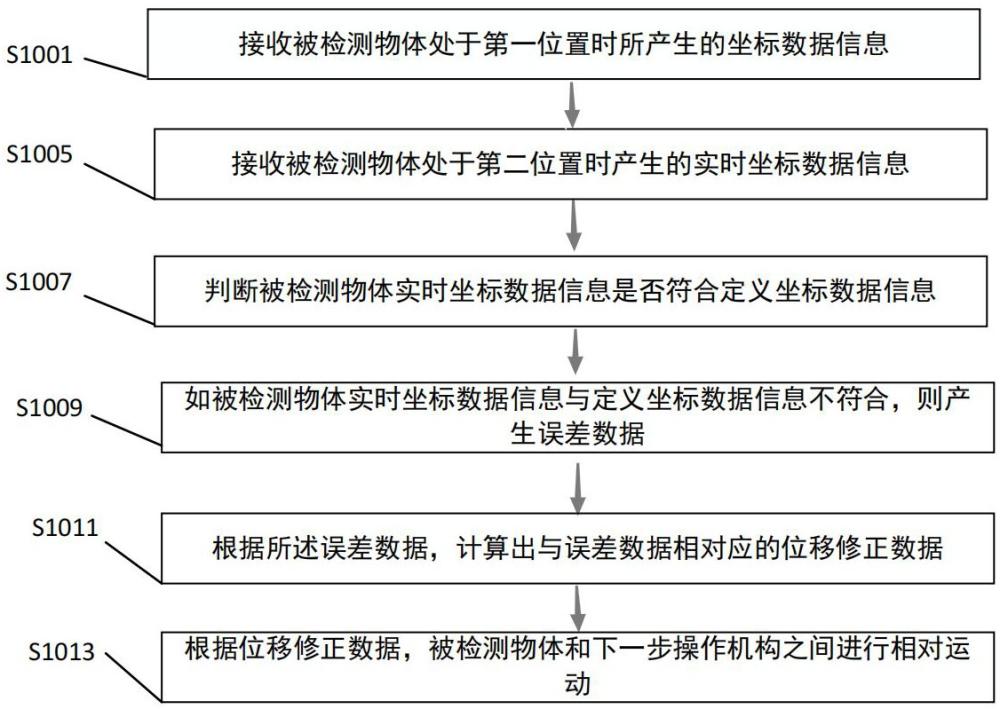
4、接收被检测物体处于第一位置时所产生的坐标数据信息,所述坐标数据信息包括位置坐标的横坐标值x0、纵坐标值y0、竖坐标值z0;其中,坐标数据信息通过对比系统定义的基点坐标数据信息计算得出;
5、定义坐标数据信息;
6、接收被检测物体处于第二位置时产生的实时坐标数据信息;
7、判断所述被检测物体实时坐标数据信息是否符合所述定义坐标数据信息,如符合,则进入下一步操作;
8、如所述被检测物体实时坐标数据信息与所述定义坐标数据信息不符合,则产生误差数据;
9、根据所述误差数据,计算出与所述误差数据相对应的位移修正数据;
10、根据所述位移修正数据,所述被检测物体实时坐标数据信息与定义坐标数据信息在系统定义的基点坐标数据信息中进行符合预设条件的相对变化,直到所述被检测物体实时坐标数据信息符合所述定义坐标数据信息,则进入下一步操作。
11、进一步地,所述被检测物体实时坐标数据信息与定义坐标数据信息在系统定义的基点坐标数据信息中进行符合预设条件的相对变化,其变化方式在所述基点坐标数据信息中的坐标显示为以下方式中的至少一种:
12、所述实时坐标数据信息变化,所述定义坐标数据信息维持;
13、所述实时坐标数据信息变化,所述定义坐标数据信息变化;
14、所述实时坐标数据信息维持,所述定义坐标数据信息变化。
15、进一步地,判断所述被检测物体实时坐标数据信息是否符合所述定义坐标数据信息包括如下步骤:
16、计算所述实时坐标数据信息与所述定义坐标数据信息的横坐标值、纵坐标值、竖坐标值的绝对值相减,将所得到数值差绝对值化后,形成数据,其中,所述数据由与坐标对应数值之差的x9、y9、z9三个数值组成;
17、当x9=0,y9>0,z9=0时,判定所述被检测物体实时坐标数据信息符合所述定义坐标数据信息,其他结果则判定为不符合。
18、进一步地,所述位移修正数据由所述实时坐标数据信息与所述定义坐标数据信息二者横坐标的绝对值数据相减产生,所述位移修正数据的绝对值为所述被检测物体实时坐标数据信息与定义坐标数据信息在系统定义的基点坐标数据信息中横坐标方向的变化数值之和。
19、再进一步地,所述被检测物体处于第一位置时所产生的坐标数据信息、所述实时坐标数据信息是通过测量生成的;其中,所述测量过程包括使用具有测量物体之间间距功能的传感器。
20、本申请还提供一种扫描测距定位系统,包括执行上述的扫描测距定位方法的处理系统,所述系统包括:
21、测量系统,测量被检测物体实时数据信息,并进行记录;
22、动力装置,提供所述被检测物体位移以及其他机构运行所需动力;
23、存储计算系统,用来记录、存储、计算整体系统数据信息;
24、连接系统,连接各子系统、其他装置与存储计算系统,并传导相应数据信息。
25、进一步地,所述被检测物体实时坐标数据信息与定义坐标数据信息在系统定义的基点坐标数据信息中进行符合预设条件的相对变化是通过所述动力装置连接收到所述存储计算系统的指令后来实现的;其中,所述动力装置与链轮链条传动、齿轮齿条传动、同步带传动、钢带传动、丝杆传动等传动方式中的一种或多种的配合。
26、进一步地,所述传感器至少数量至少为一个;其中,当所述传感器数量大于一个时,不同位置所述传感器产生多组数据。
27、进一步地,所述多组数据通过排除所述被检测物体不同位置几何尺寸的差异影响后,与所述预设坐标信息计算得出的多个位移修正数据相同。
28、进一步地,所述存储计算系统包括:
29、信息接收模块,用于接收测量系统数据信息,根据数据信息进行相应计算;
30、存储模块,用于存储测量系统产生的数据信息、存储计算系统计算得出的数据信息,以及根据任意系统数据信息所产生的系统指令;
31、计算模块,用于不同数据通过预设对应函数指令计算;
32、数据转换模块,用于将各数据信息转换为可以被动力系统读取的指令信息。
33、进一步地,还包括:
34、信息显示终端,用于实时显示系统通过测量、计算、接收等方式获得的数据信息;
35、控制终端,用于接收指令对系统进行开启、运行、暂停、关闭操作;其中,控制终端通过预设指令触发条件,在满足条件时自动控制系统执行所述开启、运行、暂停、关闭操作。
36、本申请技术方案的技术效果和优点:
37、(1)通过对处于不同位置的物品进行实时定位,将数据传输到中央系统,实现实时监控、调整和控制,节省大量人工;
38、(2)通过系统运算,预设数据模型后生成位移修正数据,能高效控制生产作业效率,减少误差;
39、(3)通过对物品实行多点定位,各定位坐标产生的实时数据信息通过系统与预设坐标信息进行验证,确保数据精确可靠,减少误差;
40、(4)本系统及方法结构简单,步骤清晰,能满足工业场景中对于测距、定位要求的同时,整体稳定性和适配性较高,便于推广。
技术特征:
1.一种扫描测距定位方法,其特征在于,所述方法包括:
2.根据权利要求1所述的一种扫描测距定位方法,其特征在于:所述被检测物体(6)实时坐标数据信息与所述定义坐标数据信息在系统定义的所述基点坐标数据信息中进行符合预设条件的相对变化,其变化方式在所述基点坐标数据信息中的坐标显示为以下方式中的至少一种:
3.根据权利要求2所述的一种扫描测距定位方法,其特征在于,判断所述被检测物体(6)实时坐标数据信息是否符合所述定义坐标数据信息包括如下步骤:
4.根据权利要求3所述的一种扫描测距定位方法,其特征在于:所述位移修正数据由所述实时坐标数据信息与所述定义坐标数据信息二者横坐标的绝对值数据相减产生。
5.根据权利要求3所述的一种扫描测距定位方法,其特征在于:所述被检测物体(6)处于第一位置时所产生的所述坐标数据信息、所述实时坐标数据信息是通过测量生成的;其中,所述测量过程包括使用具有测量物体之间间距功能的传感器(1)。
6.一种扫描测距定位系统,其特征在于,包括执行如权利要求1-5中任意一项所述的扫描测距定位方法的处理系统,所述系统包括:
7.根据权利要求6所述的一种扫描测距定位系统,其特征在于:所述被检测物体(6)实时坐标数据信息与定义坐标数据信息在系统定义的基点坐标数据信息中进行符合预设条件的相对变化是通过所述动力装置连接收到所述存储计算系统的指令后来实现的;其中,所述动力装置与链轮链条传动、齿轮齿条传动、同步带传动、钢带传动、丝杆传动方式中的一种或多种配合。
8.根据权利要求6所述的一种扫描测距定位系统,其特征在于:传感器(1)数量至少为一个;其中,当所述传感器(1)数量大于一个时,不同位置所述传感器(1)产生多组数据。
9.根据权利要求8所述的一种扫描测距定位系统,其特征在于:所述多组数据通过排除所述被检测物体(6)不同位置几何尺寸的差异影响后,其分别与所述定义坐标数据信息计算得出的多个所述位移修正数据相同。
10.根据权利要求9所述的一种扫描测距定位系统,其特征在于,所述存储计算系统包括:
11.根据权利要求10所述的一种扫描测距定位系统,其特征在于,还包括:
技术总结
本申请提供一种扫描测距定位系统及方法,该方法包括:接收被检测物体处于第一位置时所产生的坐标数据信息,定义坐标数据信息;接收被检测物体处于第二位置时产生的实时坐标数据信息;判断所述被检测物体实时坐标数据信息是否符合所述定义坐标数据信息,如符合,则进入下一步操作;如所述被检测物体实时坐标数据信息与所述定义坐标数据信息不符合,则产生误差数据;根据所述误差数据,计算出与所述误差数据相对应的位移修正数据;根据所述位移修正数据,直到所述符合所述定义坐标数据信息,则进入下一步操作。本申请提供的技术方案稳定、高效,能解决大部分工业化场景中的对物品定位、测距、调整等技术需求。
技术研发人员:唐军,梁学谦
受保护的技术使用者:湖南盛势通科技有限公司
技术研发日:
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!