一种完整可实时处理的双基前视SAR高分辨成像方法
本发明属于无线通信,具体涉及一种完整可实时处理的双基前视sar高分辨成像方法。
背景技术:
1、移变构型双基前视sar具有在飞行过程中构型时变的特点,在特定条件下能够对接收机前方地面区域进行高分辨率成像。然而,由于构型存在时变的问题,导致无法将距离向或者方位向的信号表示为解析式的形式。与此同时,距离单元徙动(range cellmigration, rcm)及方位信号还存在复杂的二维空变问题,导致很难开发出适应性良好且高性能的成像算法。
2、针对上述问题,在距离向处理中已有距离分块、距离徙动函数空变拟合、cs、ncs、kt等方法来处理空变问题,然而,这些方法或者是针对特定构型,或者需要借助matlab工具箱才能进行,不便于工程化实现;而距离多普勒(range doppler, rd)方法、ncs方法等可用于解决方位信号的空变问题,然而,在高速平台的双基合成孔径雷达成像应用中,难以有效地对二维空变进行表示。
3、针对移变双基前视合成孔径雷达构型,目前已存在采用matlab内建czt的方法实现的kt进行空变的线性距离走动校正,并在方位向处理中采用建立在多项式拟合基础上的ncs方法进行信号的均衡处理。
4、然而,上述方法存在以下缺点:
5、1)该方法没考虑并解决多普勒模糊或者多普勒普折叠情况下的kt,导致成像算法失效。同时,由于将matlab内建czt作为算法的基础模块,无法直接工程化,即使可以工程化,但工程化运算量仍然很大;
6、2)该方法采用成像场景中心坐标轴上设置方位参考点的方式,在特定构型下当等距线与设置坐标轴无交点的时候,解析求解将无法得出实数解,会导致后续算法失效;同时,由于坐标轴上参考点有可能超出成像场景较远,导致实际方位信号空变表征系数变大,导致参数设置以及算法后续部分需要进行较大程度调整,无法由硬件平台搭载实现长时间稳定运行;
7、3)该方法采用原始的遍历法查找等距线,需要反复尝试才能得到正确可用的等距线取样点,效率极低无法在硬件平台统一处理;
8、4)由于上述三个缺点,使得该方法无法很好地解决方位信号的二维空变,因此无法真正实现整个成像场景的高分辨成像。
技术实现思路
1、为了解决现有技术中所存在的上述问题,本发明提供了一种完整可实时处理的双基前视sar高分辨成像方法。
2、本发明要解决的技术问题通过以下技术方案实现:
3、一种完整可实时处理的双基前视sar高分辨成像方法,包括:
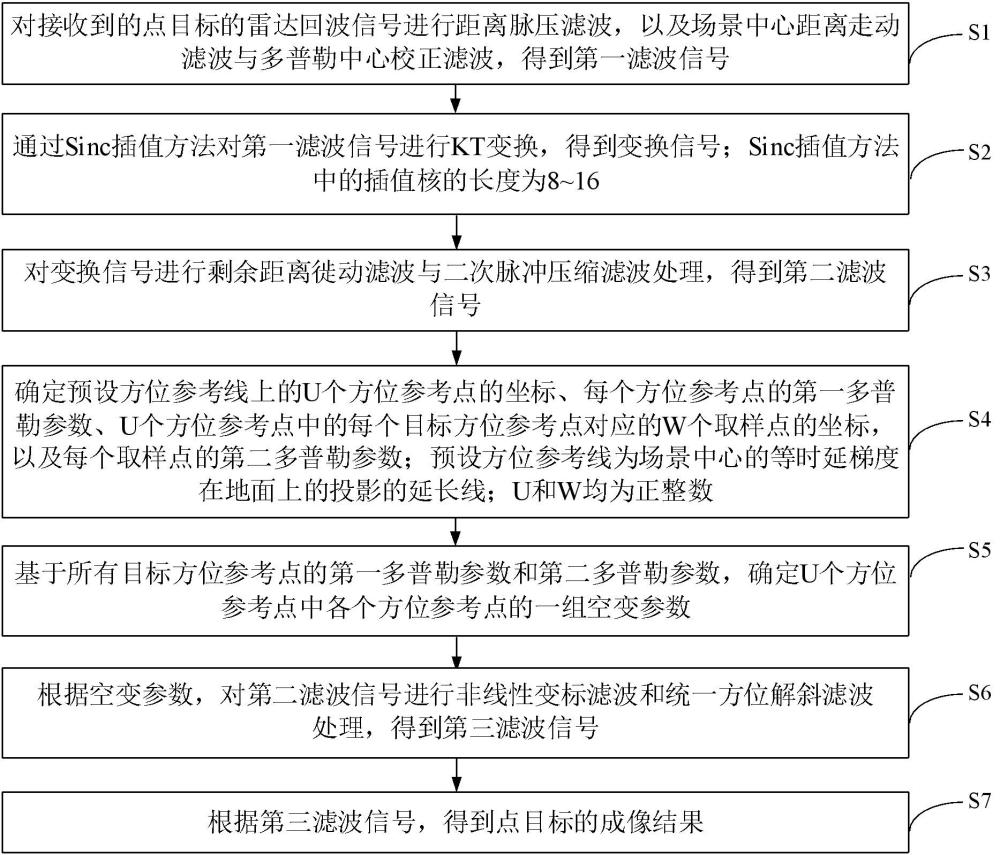
4、s1、对接收到的点目标的雷达回波信号进行距离脉压滤波,以及场景中心距离走动滤波与多普勒中心校正滤波,得到第一滤波信号;
5、s2、通过sinc插值方法对所述第一滤波信号进行kt变换,得到变换信号;所述sinc插值方法中的插值核的长度为8~16;
6、s3、对所述变换信号进行剩余距离徙动滤波与二次脉冲压缩滤波处理,得到第二滤波信号;
7、s4、确定预设方位参考线上的u个方位参考点的坐标、每个方位参考点的第一多普勒参数、所述u个方位参考点中的每个目标方位参考点对应的w个取样点的坐标,以及每个取样点的第二多普勒参数;所述预设方位参考线为场景中心的等时延梯度在地面上的投影的延长线;u和w均为正整数;
8、s5、基于所有目标方位参考点的所述第一多普勒参数和所述第二多普勒参数,确定所述u个方位参考点中各个方位参考点的一组空变参数;
9、s6、根据所述空变参数,对所述第二滤波信号进行非线性变标滤波和统一方位解斜滤波处理,得到第三滤波信号;
10、s7、根据所述第三滤波信号,得到所述点目标的成像结果。
11、与现有技术相比,本发明的有益效果:
12、本发明采用8-16点sinc插值实现的kt,对进行了场景中心点距离走动和多普勒中心校正滤波后的信号进行慢时间尺度变换,使得本方法在工程应用中有足够的精度,不仅适用于多普勒模糊和折叠的情况,还能在实现功能的情况下具有最小的运算复杂度;本发明采用场景中心的时延梯度的地面投影线作为方位参考线,并进行方位参考线上的方位参考点的取样点的相关参数的确定,不仅使本方法具有更强的适应性,还提高了效率;以及,本发明确定空变参数并根据空变参数进行信号的滤波处理,消除了方位参数的二维空变,实现了高精度的二维成像;因此,本发明可完整、实时地进行双基前视sar高分辨率成像。
13、以下将结合附图及对本发明做进一步详细说明。
技术特征:
1.一种完整可实时处理的双基前视sar高分辨成像方法,其特征在于,包括:
2.根据权利要求1所述的完整可实时处理的双基前视sar高分辨成像方法,其特征在于,s1包括:
3.根据权利要求2所述的完整可实时处理的双基前视sar高分辨成像方法,其特征在于,所述场景中心的距离走动滤波与多普勒中心校正滤波器的表达式如下:
4.根据权利要求1所述的完整可实时处理的双基前视sar高分辨成像方法,其特征在于,s4包括:
5.根据权利要求4所述的完整可实时处理的双基前视sar高分辨成像方法,其特征在于,方位参考点的第一多普勒参数包括:第一斜距展开系数、第二斜距展开系数和第三斜距展开系数,s42包括:
6.根据权利要求4所述的完整可实时处理的双基前视sar高分辨成像方法,其特征在于,s43包括:
7.根据权利要求1所述的完整可实时处理的双基前视sar高分辨成像方法,其特征在于,每个目标方位参考点是根据所述u个方位参考点的坐标,从所述u个方位参考点中选出的一个方位参考点,s5包括:
8.根据权利要求7所述的完整可实时处理的双基前视sar高分辨成像方法,其特征在于,方位参考点的第一多普勒参数包括:第一斜距展开系数、第二斜距展开系数和第三斜距展开系数;取样点的第二多普勒参数包括:第四斜距展开系数、第五斜距展开系数和第六斜距展开系数;s51包括:
9.根据权利要求1所述的完整可实时处理的双基前视sar高分辨成像方法,其特征在于,s6包括:
10.根据权利要求9所述的完整可实时处理的双基前视sar高分辨成像方法,其特征在于,方位参考点对应的一组非线性变标系数包括:第一非线性变标系数、第二非线性变标系数和第三非线性变标系数;
技术总结
本发明公开了一种完整可实时处理的双基前视SAR高分辨成像方法,包括:对点目标的雷达回波信号滤波得到第一滤波信号;通过Sinc插值方法对第一滤波信号KT变换得到变换信号;Sinc插值方法中插值核长度为8~16;对变换信号滤波得到第二滤波信号;确定预设方位参考线上的U个方位参考点的坐标、每个方位参考点的第一多普勒参数、U个方位参考点中每个目标方位参考点对应的W个取样点的坐标,以及每个取样点的第二多普勒参数;基于所有目标方位参考点的第一多普勒参数和第二多普勒参数,确定U个方位参考点中各个方位参考点的一组空变参数;根据空变参数对第二滤波信号滤波,得到第三滤波信号;根据第三滤波信号得到点目标的成像结果。
技术研发人员:李亚超,王选琪,王义涛,宋炫,安培赟,刘裕洲,唐世阳
受保护的技术使用者:西安电子科技大学
技术研发日:
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!