一种农机的抗扰续航时间检测方法及装置与流程
本发明属于导航抗干扰检测,具体为一种农机的抗扰续航时间检测方法及装置。
背景技术:
1、农业机械是指在作物种植业和畜牧业生产过程中,以及农、畜产品初加工和处理过程中所使用的各种机械。农业机械包括农用动力机械、农田建设机械、土壤耕作机械、种植和施肥机械、植物保护机械、农田排灌机械、作物收获机械、农产品加工机械、畜牧业机械和农业运输机械等,而且随着技术的发展,智能农机在目前的农业中应用也越来越广泛,智能农机作业是最主要的系统就是导航系统,目前对智能农机上的导航系统在受到干扰检查的方法和设备比较少,一旦导航系统受到干扰后出现偏差,就会的农机偏离预定的路线,造成农机的作业造成影响,从而影响农机的作业。
技术实现思路
1、针对上述情况,为克服现有技术的缺陷,本发明提供一种农机的抗扰续航时间检测方法及装置,有效地解决了上述背景技术中提到的问题。
2、为实现上述目的,本发明提供如下技术方案:一种农机的抗扰续航时间检测方法,所述方法步骤包括:
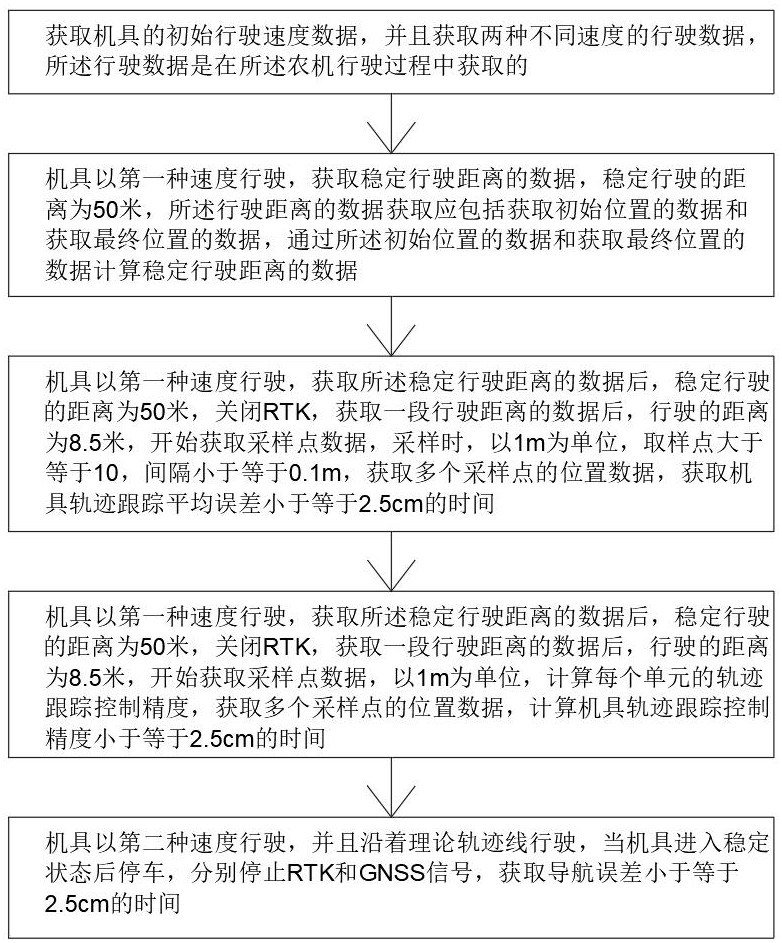
3、步骤一:获取机具的初始行驶速度数据,并且获取两种不同速度的行驶数据,所述行驶数据是在所述农机行驶过程中获取的;
4、步骤二:机具以第一种速度行驶,获取稳定行驶距离的数据,所述行驶距离的数据获取应包括获取初始位置的数据和获取最终位置的数据,通过所述初始位置的数据和获取最终位置的数据计算稳定行驶距离的数据;
5、步骤三:机具以第一种速度行驶,获取所述稳定行驶距离的数据后,关闭rtk,获取一段行驶距离的数据后,开始获取采样点数据,获取多个采样点的位置数据,获取机具轨迹跟踪平均误差小于等于2.5cm的时间;
6、步骤四:机具以第一种速度行驶,获取所述稳定行驶距离的数据后,关闭rtk,获取一段行驶距离的数据后,开始获取采样点数据,获取多个采样点的位置数据,计算机具轨迹跟踪控制精度小于等于2.5cm的时间;
7、步骤五:机具以第二种速度行驶,并且沿着理论轨迹线行驶,当机具进入稳定状态后停车,分别停止rtk和gnss信号,获取导航误差小于等于2.5cm的时间。
8、优选的,在所述步骤三中还包括:重复进行测量获取三次采样点数据,然后记录每次测量的数据,
9、根据三次的采样点数据进行获取平均值,取得的平均值大于等于10s时符合要求,反之则不符合。
10、优选的,在所述步骤四中还包括:重复进行测量获取采样点数据三次,然后记录每次测量的数据;
11、根据三次的获取数据进行获取平均值;
12、当关闭rtk时取得的平均值大于等于10s时符合要求,反之则不符合;
13、当遮挡天线时取得的平均值大于等于5s时符合要求,反之则不符合。
14、优选的,在所述步骤五中还包括:复进行测量三次,然后记录每次测量的数据;
15、根据三次获取的数据进行获取平均值;
16、当无卫星信号时取得的平均值大于等于5s时符合要求,反之则不符合;
17、当无差分信号时取得的平均值大于等于10s时符合要求,反之则不符合。
18、优选的,所述采样点的位置数据是在所述农机按照实际运动轨迹行驶过程中得到的,前一个所述采样点与下一个所述采样点之间预设有采样间隔。
19、本发明提供了一种农机的抗扰续航时间检测装置,其特征在于:所述装置包括获取模块、确定模块和计算模块;
20、所述获取模块,用于获取机具不同的行驶速度,并且获取机具在不同行驶速度下的行驶的距离,所述行驶速度与所述行驶的距离是在所述机具按照实际的运动轨迹线行驶获得的;
21、所述获取模块,还用于获取采样点的位置数据,并且获取多个采样点的位置数据,所述采样点的位置数据是所述机具按照实际的运动轨迹线行驶获得的,对所述机具进行位置采样得到的;
22、所述确定模块,用于对于多个第一采样点中的每个第一采样点位置数据,根据所述第一采样点的位置数据与对应的所述第二采样点的位置数据,确定所述第一采样点与对应的所述第二采样点的距离,并且确定两个所述采样点之间的采样时间;
23、所述计算模块,用于计算两个所述采样点之间的距离,计算所述采样点之间的距离是否满足条件,通过获取得到采样点的位置数据计算所述机具轨迹误差小于等于2.5cm的时间。
24、本发明提供了一种农机的抗扰续航时间检测装置,所述装置包括:
25、处理器;
26、用于存储所述处理器的可执行指令的存储器;
27、其中,所述处理器被配置为执行所述存储器中存储的指令以实现如上述所述的一种农机的抗扰续航时间检测方法。
28、本发明提供了一种农机的抗扰续航时间检测装置,所述装置包括:
29、计算机存储介质,所述存储介质中存储有指令,当所述指令在处理组件上运行时,使得所述处理组件执行如上述所述的一种农机的抗扰续航时间检测方法。
30、本发明提供了一种农机的抗扰续航时间检测装置,所述装置包括:检测系统,所述检测系统由处理机构和设在所述农机上的采样机构组成;
31、所述采样机构用于在所述农机行驶的过程中,对所述农机进行位置采样得到多个采样点的位置数据,并且向所述处理机构传输多个采样点的位置数据;
32、所述处理机构用于执行上述所述的一种农机的抗扰续航时间检测方法。
33、与现有技术相比,本发明的有益效果是:
34、本发明提供的一种农机的抗扰续航时间检测方法,可以实现对农机导航系统受到干扰后能够稳定工作的时间进行检测,并且可以实现进行不同的情况下对导航系统进行干扰,然后对导航系统稳定工作的时间进行检测,检测的比较准确,可靠,为农机进行更好的作业提供了基础。
技术特征:
1.一种农机的抗扰续航时间检测方法,其特征在于:所述方法步骤包括:
2.根据权利要求1所述的一种农机的抗扰续航时间检测方法,其特征在于,在所述步骤三中还包括:重复进行测量获取三次采样点数据,然后记录每次测量的数据,
3.根据权利要求1所述的一种农机的抗扰续航时间检测方法,其特征在于,在所述步骤四中还包括:重复进行测量获取采样点数据三次,然后记录每次测量的数据;
4.根据权利要求1所述的一种农机的抗扰续航时间检测方法,其特征在于,在所述步骤五中还包括:复进行测量三次,然后记录每次测量的数据;
5.根据权利要求1所述的一种农机的抗扰续航时间检测方法,其特征在于:所述采样点的位置数据是在所述农机按照实际运动轨迹行驶过程中得到的,前一个所述采样点与下一个所述采样点之间预设有采样间隔。
6.一种农机的抗扰续航时间检测装置,其特征在于:所述装置包括获取模块、确定模块和计算模块;
7.一种农机的抗扰续航时间检测装置,其特征在于:所述装置包括:
8.一种农机的抗扰续航时间检测装置,其特征在于:所述装置包括:
9.一种农机的抗扰续航时间检测装置,其特征在于:所述装置包括:检测系统,所述检测系统由处理机构和设在所述农机上的采样机构组成;
技术总结
本发明涉及导航抗干扰检测技术领域,且公开了一种农机的抗扰续航时间检测方法及装置,方法包括,获取机具的初始行驶速度数据,并且获取两种不同速度的行驶数据,所述行驶数据是在所述农机行驶过程中获取的;机具以第一种速度行驶,获取稳定行驶距离的数据,所述行驶距离的数据获取应包括获取初始位置的数据和获取最终位置的数据,通过所述初始位置的数据和获取最终位置的数据计算稳定行驶距离的数据可以实现对农机导航系统受到干扰后能够稳定工作的时间进行检测,并且可以实现进行不同的情况下对导航系统进行干扰,然后对导航系统稳定工作的时间进行检测,检测的比较准确,可靠,为农机进行更好的作业提供了基础。
技术研发人员:刘燕,陈彬,张井超,于庆旭,谭本垠,缪友谊,陈家豪
受保护的技术使用者:农业农村部南京农业机械化研究所
技术研发日:
技术公布日:2024/3/17
- 还没有人留言评论。精彩留言会获得点赞!