一种电子机械制动系统卡钳夹紧力估计方法
本发明涉及汽车智能和线控底盘,特别涉及一种电子机械制动系统卡钳夹紧力估计方法。
背景技术:
1、随着智能化和电动化的发展,汽车底盘系统必须配合实现控制功能,从而提高汽车的舒适性和安全性。因此,电子机械制动系统应运而生。
2、电子机械制动系统摒弃了传统液压助力系统的真空助力器,取消了液压管路,大大简化了制动系统的结构,其通过电子踏板产生模拟信号传递给控制系统,实现四轮制动力的精准调控,具有响应快、效率高等优点。
3、但目前电子系统制动技术还不够成熟,由于刹车片处的温度变化复杂、系统磨损等因素,传感器无法实现夹紧力的精准测量,进而影响制动系统的控制精度。这是本申请需要着重改善的地方。
技术实现思路
1、本发明所要解决的技术问题是要提供一种电子机械制动系统卡钳夹紧力估计方法,基于电子机械制动系统电机转角和转角速度传感器信号,检测卡钳的运动状态,提高了卡钳夹紧力的估计精度。
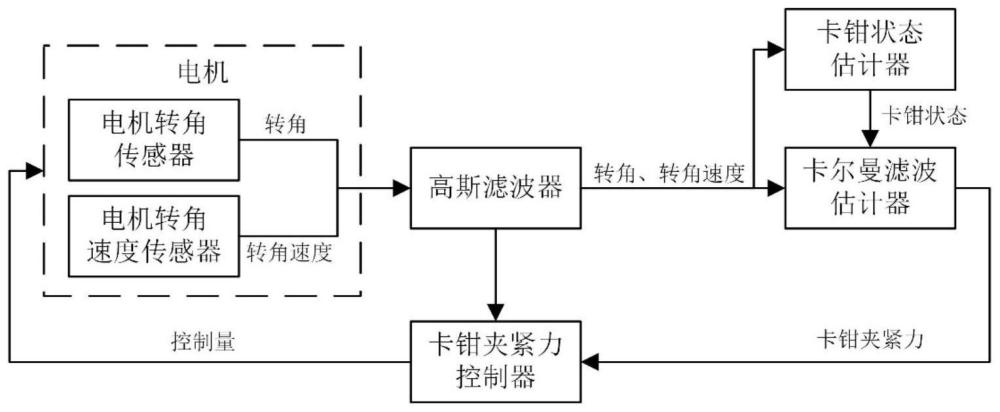
2、为了解决以上的技术问题,本发明提供了一种电子机械制动系统卡钳夹紧力估计方法,通过高斯滤波器对电机传感器信号进行降噪,并通过电机信号进行卡钳状态估计从而判断系统摩擦力的方向,最后将卡钳夹紧力视为干扰量,设计卡钳夹紧力观测器进行夹紧力观测,包括如下的步骤:
3、步骤s1:对电机转角和转角速度信号进行高斯滤波;
4、步骤s2:对滤波后的电机转角和转角速度信号进行分析,根据电机转角的变化幅度和转角速度的符号,将卡钳划分为正向夹紧、逆向分离和保持状态三种工况;
5、步骤s3:根据卡钳所处的状态,对电子机械制动系统力矩平衡方程系数进行调整,经卡尔曼滤波观测器对卡钳夹紧力的实时估计,实现电子机械制动系统的精准控制。
6、本发明的优越功效在于:
7、1)高斯滤波器对电机传感器信号进行降噪,提高卡钳夹紧力的估计精度;
8、2)本方法发明提出一种卡钳工况有限状态机,通过设置边界,减少卡钳夹紧力的估计波动,同时将卡钳夹紧力视为干扰量,避免了对夹紧力的非线性特性进行建模分析,从而提高了卡钳夹紧力的估计精度。
技术特征:
1.一种电子机械制动系统卡钳夹紧力估计方法,其特征在于:包括如下的步骤:
2.根据权利要求1所述的电子机械制动系统卡钳夹紧力估计方法,其特征在于:所述步骤s1包括如下的步骤:
3.根据权利要求1所述的电子机械制动系统卡钳夹紧力估计方法,其特征在于:所述步骤s2:定义flag=1代表正向夹紧过程,flag=0代表保持状态过程,flag=-1代表逆向分离过程,定义电机正向转动转角变化量阈值δθ1和转角速度阈值ω1,电机逆向转动转角变化量阈值δθ2和转角速度阈值ω2;
4.根据权利要求1所述的电子机械制动系统卡钳夹紧力估计方法,其特征在于:所述电子机械制动系统电机转矩平衡方程为:
5.一种计算机系统,包括存储器、处理器及存储在存储器上的计算机程序,其特征在于:所述处理器执行所述计算机程序以实现权利要求1所述方法的步骤。
6.一种计算机可读存储介质,其上存储有计算机程序,其特征在于:该计算机程序被处理器执行时实现权利要求1所述方法的步骤。
7.一种计算机程序产品,包括计算机程序,其特征在于:该计算机程序被处理器执行时实现权利要求1所述方法的步骤。
技术总结
本发明公开一种电子机械制动系统卡钳夹紧力估计方法,通过高斯滤波器对电机传感器信号进行降噪,并通过电机信号进行卡钳状态估计从而判断系统摩擦力的方向,最后将卡钳夹紧力视为干扰量,设计卡钳夹紧力观测器进行夹紧力观测。本发明的优点是提出卡钳工况有限状态机,通过设置边界减少卡钳夹紧力的估计波动,提高了卡钳夹紧力的估计精度。
技术研发人员:吴光强,刘凯,刘思宇,谭小强
受保护的技术使用者:同济大学
技术研发日:
技术公布日:2024/4/22
- 还没有人留言评论。精彩留言会获得点赞!