导航路径规划方法、设备及存储介质与流程
本申请涉及导航,尤其涉及一种导航路径规划方法、设备及存储介质。
背景技术:
1、随着社会经济和科技的发展,越来越多的移动机器人走进于人们的生活和工作,从各种居家的扫地机器人到服务场所多种多样的服务、送餐机器人,再到物流以及工业领域的物流机器人。机器人的导航路径规划是运行过程中非常重要的一环,优质的导航路径能够提高机器人的工作效率和降低能耗,以展现机器人的价值。目前,规划出的机器人导航路径存在可控性较差和安全性较差的缺陷,进而导致机器人的行驶存在较大风险。
2、因此,如何规划出安全可靠的导航路径是目前亟待解决的问题。
技术实现思路
1、本申请的主要目的在于提供一种导航路径规划方法、设备及存储介质,旨在规划出安全可靠的导航路径,以提高机器人的运行安全性和可靠性。
2、第一方面,本申请提供一种导航路径规划方法,所述导航路径规划方法包括以下步骤:
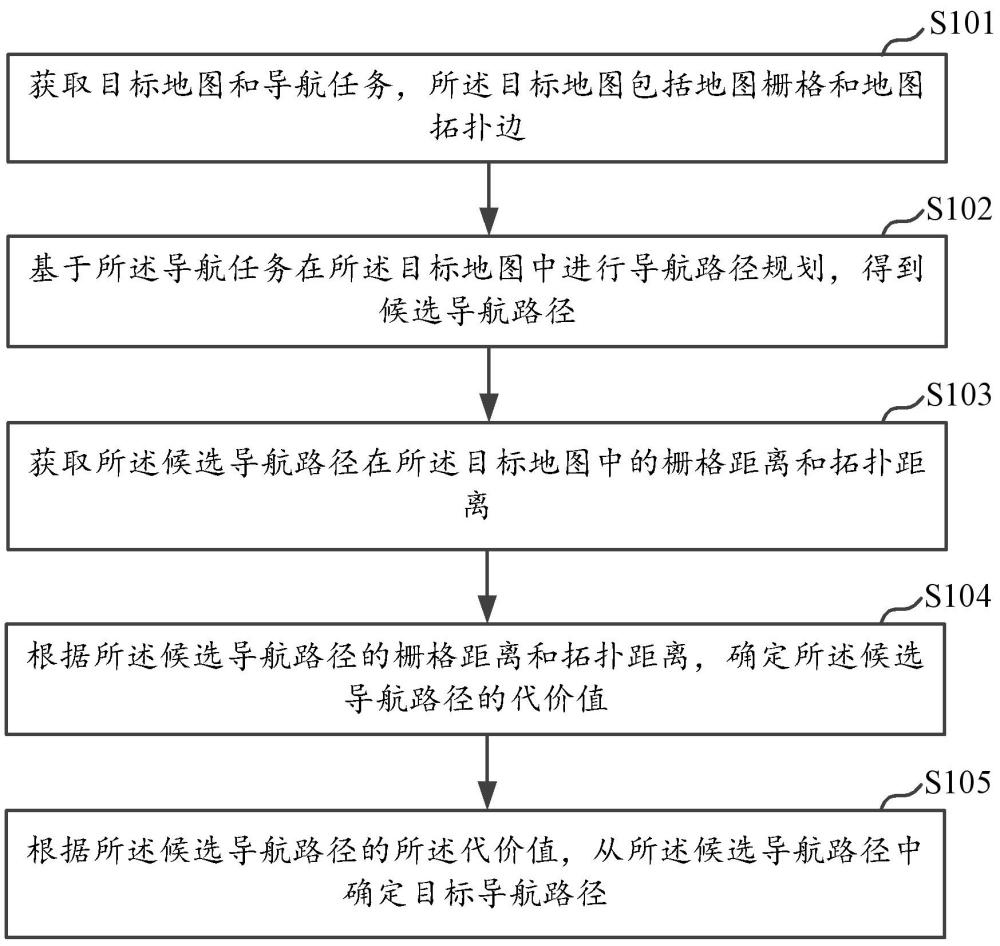
3、获取目标地图和导航任务,所述目标地图包括地图栅格和地图拓扑边;
4、基于所述导航任务在所述目标地图中进行导航路径规划,得到候选导航路径;
5、获取所述候选导航路径在所述目标地图中的栅格距离和拓扑距离;
6、根据所述候选导航路径的栅格距离和拓扑距离,确定所述候选导航路径的代价值;
7、根据所述候选导航路径的所述代价值,从所述候选导航路径中确定目标导航路径。
8、第二方面,本申请还提供一种终端设备,所述终端设备包括处理器、存储器、以及存储在所述存储器上并可被所述处理器执行的计算机程序,其中所述计算机程序被所述处理器执行时,实现如上述的导航路径规划方法的步骤。
9、第三方面,本申请还提供一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序,其中所述计算机程序被处理器执行时,实现如上述的导航路径规划方法的步骤。
10、本申请提供一种导航路径规划方法、设备及存储介质,本申请通过获取融合有地图栅格和地图拓扑边的目标地图,并使用该目标地图进行混合导航路径规划,既能自定义路径,也能达到避障目的。通过根据候选导航路径的栅格距离和拓扑距离,能够准确地确定候选导航路径的代价值,以及根据候选导航路径的代价值,能够准确地从候选导航路径中确定更为安全可靠的目标导航路径,极大地提高了导航路径规划的可靠性和可控性。
技术特征:
1.一种导航路径规划方法,其特征在于,包括:
2.如权利要求1所述的导航路径规划方法,其特征在于,所述获取所述候选导航路径在所述目标地图中的栅格距离和拓扑距离,包括:
3.如权利要求2所述的导航路径规划方法,其特征在于,所述栅格数量包括地图栅格延伸至所述地图拓扑边的影响范围的延伸点的第一栅格数量;以及,所述延伸点至所述地图拓扑边的第二栅格数量。
4.如权利要求3所述的导航路径规划方法,其特征在于,所述获取所述候选导航路径所涉及的地图栅格的栅格数量,包括:
5.如权利要求1所述的导航路径规划方法,其特征在于,所述根据所述候选导航路径的栅格距离和拓扑距离,确定所述候选导航路径的代价值,包括:
6.如权利要求1所述的导航路径规划方法,其特征在于,所述基于所述导航任务在所述目标地图中进行导航路径规划,得到候选导航路径,包括:
7.如权利要求1所述的导航路径规划方法,其特征在于,所述获取目标地图,包括:
8.如权利要求7所述的导航路径规划方法,其特征在于,所述获取地图拓扑边,包括:
9.如权利要求8所述的导航路径规划方法,其特征在于,所述拓扑属性包括拓扑方向,所述拓扑方向包括单向和双向;
10.一种终端设备,其特征在于,所述终端设备包括处理器、存储器、以及存储在所述存储器上并可被所述处理器执行的计算机程序,其中所述计算机程序被所述处理器执行时,实现如权利要求1至9中任一项所述的导航路径规划方法的步骤。
11.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质上存储有计算机程序,其中所述计算机程序被处理器执行时,实现如权利要求1至9中任一项所述的导航路径规划方法的步骤。
技术总结
本申请提供一种导航路径规划方法、设备及存储介质,属于导航领域,该方法包括:获取目标地图和导航任务,所述目标地图包括地图栅格和地图拓扑边;基于所述导航任务在所述目标地图中进行导航路径规划,得到候选导航路径;获取所述候选导航路径在所述目标地图中的栅格距离和拓扑距离;根据所述候选导航路径的栅格距离和拓扑距离,确定所述候选导航路径的代价值;根据所述候选导航路径的所述代价值,从所述候选导航路径中确定目标导航路径。本申请能够规划出更为安全可靠的目标导航路径,极大地提高了导航路径规划的可靠性和可控性。
技术研发人员:吴德明,王斌
受保护的技术使用者:深圳竹芒科技有限公司
技术研发日:
技术公布日:2024/4/24
- 还没有人留言评论。精彩留言会获得点赞!