一种复杂遮挡环境下的偏振导航定向方法
本发明涉及偏振光导航,具体为一种复杂遮挡环境下的偏振导航定向方法。
背景技术:
1、生物是自然界中最杰出的艺术品,也是人类学术思想、工程原理和发明创造的源泉。人们发现自然界中的一些昆虫有小而功能齐全的复眼,它们具有体积小、灵敏度高、视场大的优点。昆虫可以利用复眼的偏振结构感知天空偏振矢量场信息,获得出色的导航定位能力。仿生偏振光导航通过借鉴昆虫的导航机制,利用天空光的偏振分布模式可以实现高精度的导航,且具有抗电磁干扰、不易累积误差、不受地理位置限制等优势,有效弥补了常见导航技术(惯性导航、卫星导航、地磁导航等)的不足,逐渐成为自主导航和组合导航的研究热点。
2、在晴朗无遮挡环境下,偏振模式具有明显的方向特征,可以通过拟合偏振角度图中太阳子午线的方法来解算航向角;然而在复杂遮挡环境下,遮挡物产生的异常像素点的存在会破坏大气偏振模式,此时直接拟合太阳子午线会获取到错误的方向信息,从而使得偏振光导航的精度降低,甚至会导致导航失效。因此,有必要构建一种新型仿生偏振光导航方法,从而提高复杂遮挡环境下仿生偏振光导航定向的鲁棒性和准确性。
技术实现思路
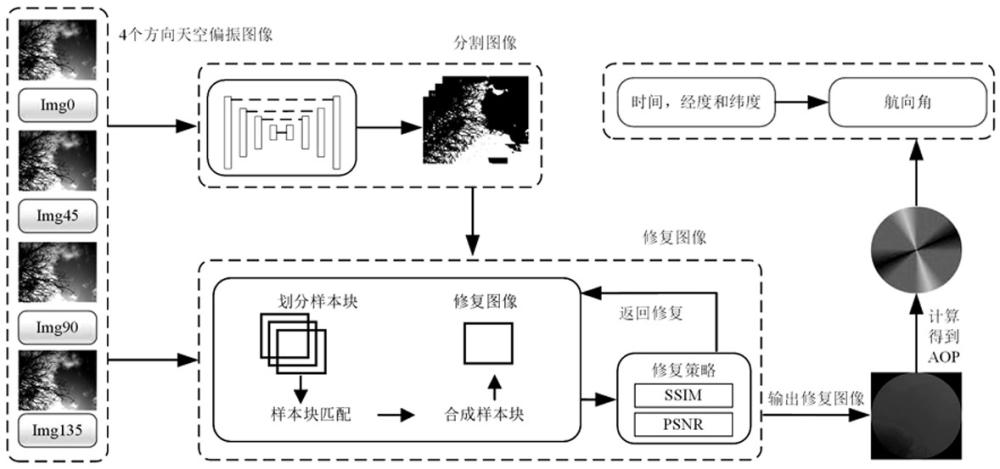
1、鉴于此,本发明的目的在于,提供一种复杂遮挡环境下的偏振导航定向方法,通过u-net深度卷积神经网络结构,能够精确的对偏振图像中的遮挡物进行分割;创新性的将预测掩模与样本块图像修复方法结合,并采用基于视觉相干性和视觉显著性的图像完备性评价指标作为约束修复策略,能够实现偏振图像的自适应调整修复;通过拟合修复图像中的太阳子午线,计算得到航向信息。
2、为了达到上述目的,进而采取的技术方案如下:
3、一种复杂遮挡环境下的偏振导航定向方法,包括以下步骤:
4、s1:采用u-net网络结构对偏振图像中的遮挡物进行分割,生成预测掩膜;
5、s2:采用神经网络预测掩膜来指导样本块修复;
6、s3:采用结构相似性指数ssim和峰值信噪比psnr作为图像修复的约束条件,直到修复效果满足设定的阈值条件后进行输出;
7、s4:将输出的修复图像进行计算得到偏振角度图像,计算载体坐标系下的太阳方位角及导航坐标系下的太阳方位角的差值,从而得到航向角。
8、优选的,步骤s1中,u-net网络结构包括三个下采样模块和三个上采样模块,下采样模块通过卷积操作提取图像中遮挡物的细节特征信息,使得网络能够更加准确地捕捉输入图像的局部和全局特征,助于模型对偏振图像中的复杂遮挡物进行精准识别和分割;上采样模块则通过反卷积等操作将特征图扩展回原始分辨率,从而还原出更为精细的分割结果,生成预测掩膜。
9、优选的,步骤s2中,用神经网络预测掩膜来指导样本块修复的方法:
10、采用神经网络预测的二值图作为边界条件去除遮挡区域,然后将去除遮挡后的图像划分样本块;
11、为了能够让输出图像中的每个图像块在输入图像中找到最佳匹配的样本块,用下式来计算图像块和样本块相应像素颜色值的差值和整体误差:
12、;
13、式中i为遍历像素的行索引,j为列索引,w和h分别是图像块imgpx和样本块samlepx的行数和列数,diff_sum是像素差值的平方和,overlap_error是图像块和样本块重叠区域的误差,该误差用于在拼接过程中确定最佳匹配的块,值越小表示两个块在颜色值上越接近,匹配度越高;
14、将待修复图像中的图像块与其最佳匹配块进行拼接来创建无缝纹理的修复图像,重复以上步骤,不断选择最佳匹配的样本块并将其拼接到图像块上,直到图像块达到图像的大小,以完成图像的修复过程。
15、优选的,步骤s3中,采用结构相似性指数ssim和峰值信噪比psnr作为约束条件对图像修复的方法:
16、采用步骤s2中n组去除遮挡的修复图像样本,计算其结构相似性指数ssim(ii)和峰值信噪比psnr(ii),并计算均值作为初始阈值ssim_threshold和psnr_threshold:
17、;
18、将计算得到的原始图像x和已修复图像y的结构相似性指数ssim和峰值信噪比psnr,与初始阈值ssim_threshold和psnr_threshold进行比较来判断修复程度,若大于阈值则认为修复效果是有效的,否则返回修复过程并通过调整比例因子α(0.1≤α≤0.5)和β(1≤β≤10)来更新阈值,直到修复效果满足设定的阈值条件后进行输出。
19、优选的,步骤s4中,采用修复图像、载体坐标系下的太阳方位角及导航坐标系下的太阳方位角的差值得到航向角的方法:
20、将输出的修复图像进行计算得到偏振角度图像,偏振角度图像通过计算0°、45°、90°和135°的四幅去除遮挡图像的光强值得到:
21、;
22、其中,aop为偏振角度,v1、v2、v3、v4分别为0°、45°、90°和135°的四幅去除遮挡图像的光强值;
23、载体坐标系下的太阳方位角αc由该坐标系下的太阳子午线的斜率k计算获得,载体坐标系下的太阳子午线通过附近的偏振角度值拟合得到:
24、;
25、而导航坐标系下的太阳方位角αb由定位授时设备提供的位置时间信息配合天文日历知识进行解算获得:
26、;
27、θs是太阳高度角,αb是导航坐标系下的太阳方位角,ω是地理纬度,δ是太阳赤纬角,t是太阳时角;
28、由式(8)和式(10)即可求得载体航向角φ=αb-αc。
29、本发明的有益效果是:
30、本发明与现有的偏振导航定向方法相比,本发明克服了原有仿生偏振光定向模型在复杂遮挡环境下适应性差的缺点,通过在定向前对天空图像进行去除遮挡,利用恢复后的天空图像进行拟合定向处理,提升了偏振导航在复杂遮挡环境下的定向精度。
技术特征:
1.一种复杂遮挡环境下的偏振导航定向方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种复杂遮挡环境下的偏振导航定向方法,其特征在于,所述u-net网络结构包括三个下采样模块和三个上采样模块,下采样模块通过卷积操作提取图像中遮挡物的细节特征信息,使得网络能够更加准确地捕捉输入图像的局部和全局特征,助于模型对偏振图像中的复杂遮挡物进行精准识别和分割;上采样模块则通过反卷积等操作将特征图扩展回原始分辨率,从而还原出更为精细的分割结果,生成预测掩膜。
3.根据权利要求2所述的一种复杂遮挡环境下的偏振导航定向方法,其特征在于,步骤s2中,用神经网络预测掩膜来指导样本块修复的方法:
4.根据权利要求3所述的一种复杂遮挡环境下的偏振导航定向方法,其特征在于,采用结构相似性指数ssim和峰值信噪比psnr作为约束条件对图像修复的方法:
5.根据权利要求4所述的一种复杂遮挡环境下的偏振导航定向方法,其特征在于,采用修复图像、载体坐标系下的太阳方位角及导航坐标系下的太阳方位角的差值得到航向角的方法:
技术总结
本发明涉及偏振光导航技术领域,具体为一种复杂遮挡环境下的偏振导航定向方法。包括以下步骤:采用U‑Net网络结构对偏振图像中的遮挡物进行分割,生成预测掩膜;采用神经网络预测掩膜来指导样本块修复;采用结构相似性指数和峰值信噪比作为图像修复的约束条件,直到修复效果满足设定的阈值条件后进行输出;将输出的修复图像进行计算得到偏振角度图像,计算载体坐标系下的太阳方位角及导航坐标系下的太阳方位角的差值,从而得到航向角。本发明克服了原有仿生偏振光定向模型在复杂遮挡环境下适应性差的缺点,通过在定向前对天空图像进行去除遮挡,利用恢复后的天空图像进行拟合定向处理,提升了偏振导航在复杂遮挡环境下的定向精度。
技术研发人员:李沅,边宇峰,卢研宏,屈绍宇,张斌,马亚云,禇文博
受保护的技术使用者:中北大学
技术研发日:
技术公布日:2024/4/29
- 还没有人留言评论。精彩留言会获得点赞!