一种便携式双目接触网几何参数检测系统及方法与流程
本申请涉及铁路轨道设备测量,特别涉及一种便携式双目接触网几何参数检测系统及方法。
背景技术:
1、随着铁路事业的不断发展,列车运行速度不断的提升,列车对铁路接触网的要求也越来越高,架空接触网作为电力机车的唯一、无备用的动力来源,其安全性直接关系列车的运营安全。接触线、承力索的导高、拉出值等几何参数作为接触网的基本参数,其直接反应了接触网的状态。由此研发了诸多车载式接触网检测装置,同时搭配传统djj-8接触网测量仪实现接触网参数的定期检测。
2、但车载式接触网检测装置上线检测需申请上线作业天窗,且需车辆部门、接触网检测部门协同配合,同时由于工务、信号、电务等多部门需上线作业致检测天窗频次低,不足以应对接触网参数检修需求。存在检测频次低、只能检测正线不能检测车站、出入站等区段侧线接触网几何参数。djj-8等手持式接触网测量仪需人工精确操作激光点发射至5300~6500mm高空、约13mm宽的接触线上测量,存在测量效率低、且为单点测量不能连续测量的缺点。
3、有鉴于此,目前亟需一种便携式双目接触网几何参数检测系统及方法。
技术实现思路
1、针对现有技术中的上述不足,本发明提供的一种便携式双目接触网几何参数检测系统及方法,具有对接触网几何参数快速连续测量、测量精度高、测量效率高的优势,解决了传统人工测量效率低、且为单点测量不能连续测量的缺点。
2、本申请为了实现上述目的具体采用以下技术方案:
3、一种便携式双目接触网几何参数检测系统,包括小车走行平台,以及固定在所述小车走行平台上的双目测量组件、推杆组件及上位机;
4、所述小车走行平台能够在轨道上移动;
5、所述双目测量组件包括线激光器和两个面阵数字相机,线激光器持续向上投射激光束到接触网上,两个面阵数字相机左右布局、随着所述小车走行平台在所述轨道上的移动向上持续拍摄激光束在接触网上的光幕靶图片,发送至上位机;
6、所述推杆组件用于安装上位机及推动小车走行平台沿轨道移动;
7、所述上位机接收光幕靶图片并通过双目几何参数检测方法计算接触网的几何参数,形成接触网状态观测数据,可以进一步判断接触网状态是否存在异常。
8、作为一种可选的技术方案,所述小车走行平台上还设置轨距测量单元,所述轨距测量单元用于测量轨道间距、倾角、超高参数,并发送至上位机。
9、作为一种可选的技术方案,所述小车走行平台上还设置速度里程测量单元,所述速度里程测量单元用于测量小车走行平台的走行速度及里程,并发送至上位机。
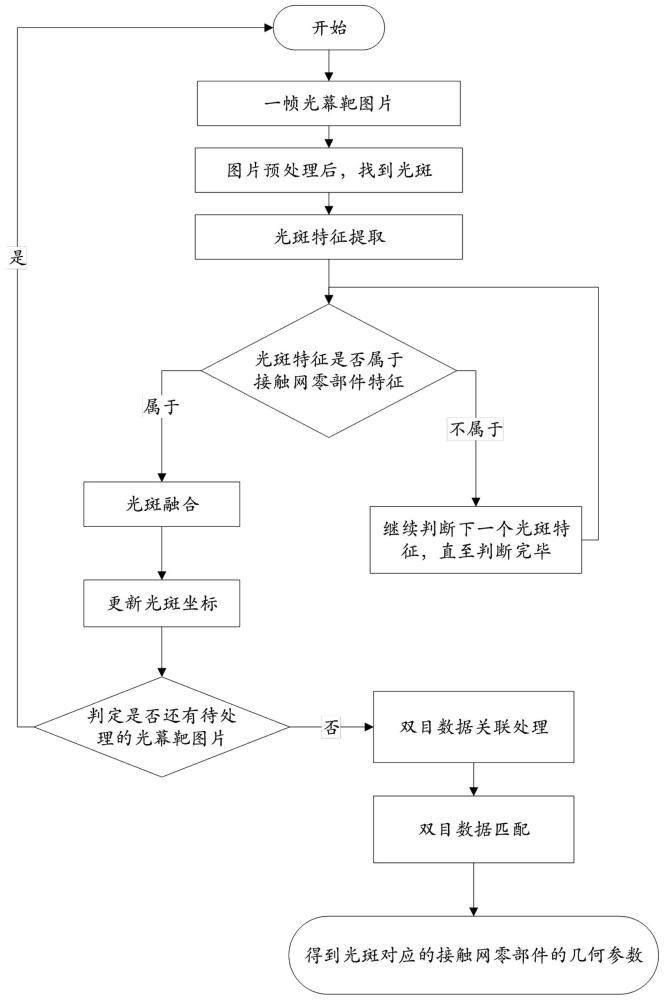
10、基于同一个发明构思,另一方面还提供了一种双目几何参数检测方法,包括单目图片预处理、双目数据关联处理及双目数据匹配处理,其中:
11、所述单目图片预处理过程为:获取一帧光幕靶图片进行降噪,自适应分割为不重叠的矩形区,对矩形区进行自适应二值化处理,再对每个所述的自适应二值化矩形区进行边界搜索找到光斑;对光斑存在的区域进行光斑特征提取,并判断对应的光斑特征是否属于接触网零部件特征;
12、若光斑特征属于接触网零部件特征,根据所述接触网零部件特征、以及与所述接触网零部件特征对应的亚像素坐标、光斑特征,生成对应的零部件类别标记;进行邻域搜索,对领域内的同类别光斑进行光斑融合;根据零部件类别标记,根据零部件特征更新光斑坐标;
13、所述双目数据关联处理过程为:根据同时刻的左右双帧光幕靶图片中的两组光斑参数归一化为光斑参数序列,构建特征比较矩阵,利用特征比较矩阵对双帧光斑参数序列的相似度进行比较;对比较结果排序,相似度排名靠前的光斑作为匹配对输出,进行双目匹配;
14、所述双目数据匹配过程为:根据所述双目数据关联处理中得到的左右光斑亚像素坐标点进行双目匹配,转换为三维世界坐标,并转换到以轨道原点为中心的接触网三维坐标系上,进一步计算光斑对应的接触网零部件对应的几何参数。
15、作为一种可选的技术方案,所述单目图片预处理包括自适应分割图像、弱化图像噪声和锐化边缘,其中:
16、自适应分割图像:将初始帧光幕靶图片作为连续检测区;将非初始帧光幕靶图片划分为连续检测区和候补检测区;将前一帧已配对、新增未配对光斑作为标记光斑,根据前一帧标记光斑的亚像素坐标信息,自动生成可覆盖前一帧标记光斑的连续检测区,同时生成不覆盖标记光斑的候补检测区;
17、弱化图像噪声:分区域弱化采样噪声、适度平滑光斑细节,采用不同高斯核对连续检测区和候补检测区进行高斯模糊;
18、锐化边缘:锐化前后景边缘后,分别对连续检测区和候补检测区进行二值化处理。
19、作为一种可选的技术方案,所述单目图片预处理包括光斑检出、特征提取和光斑融合,其中:
20、光斑检出:执行边界搜索方法,保存连续检测区和候补检测区中的光斑轮廓;
21、特征提取:依次对光斑轮廓生成最小外接矩形,在最小外接矩形中的区域进行光斑的特征提取;提取单个光斑的亚像素坐标,基于亚像素坐标、光斑特征和接触网零部件特征,新增对应的零部件类别标记,生成光斑参数;
22、光斑融合:根据亚像素坐标搜索邻近光斑,进而比较邻近光斑之间的光斑特征相似度,判断是否为同一类别的光斑,若属于同一类别的光斑,则融合拼接并更新光斑参数。
23、作为一种可选的技术方案,同等特征参数情况下,连续检测区中的光斑具有更高的权重被判别为接触网零部件。
24、作为一种可选的技术方案,所述双目数据关联处理过程还包括后续的光斑信息更新,所述光斑信息更新时采用orb不变特征亚像素中心点作为已配对、具有零部件类别标记但未配对光斑亚像素坐标进行更新;并作为标记光斑,连带对应的光斑参数输出。
25、作为一种可选的技术方案,还包括激光样条,根据光斑相对于激光样条的位置信息,进行定位纠偏,更新亚像素坐标。
26、作为一种可选的技术方案,所述激光样条是一条细长光斑,采用最小二乘法拟合为直线。
27、本申请的有益效果包括:
28、本申请记载的系统及方法具有对接触网几何参数快速连续测量、测量精度高、测量效率高的优势,解决了传统人工测量效率低、且为单点测量不能连续测量的缺点;具备较高的自动化程度,能够自动识别、跟踪和测量接触网的几何参数;可以实时分析处理数据,并可以根据需要对数据进行保存、分析、回溯等操作。
29、本申请的其他有益效果或优势将在具体实施方式中结合具体结构进行详细描述。
技术特征:
1.一种便携式双目接触网几何参数检测系统,其特征在于,包括小车走行平台,以及固定在所述小车走行平台上的双目测量组件、推杆组件及上位机;
2.如权利要求1所述的系统,其特征在于,所述小车走行平台上还设置轨距测量单元,所述轨距测量单元用于测量轨道间距、倾角及超高参数,并发送至上位机。
3.如权利要求1所述的系统,其特征在于,所述小车走行平台上还设置速度里程测量单元,所述速度里程测量单元用于测量小车走行平台的走行速度及里程,并发送至上位机。
4.一种双目几何参数检测方法,其特征在于,包括单目图片预处理、双目数据关联处理及双目数据匹配处理,其中:
5.如权利要求4所述的方法,其特征在于,所述单目图片预处理包括自适应分割图像、弱化图像噪声和锐化边缘,其中:
6.如权利要求4所述的方法,其特征在于,所述单目图片预处理包括光斑检出、特征提取和光斑融合,其中:
7.如权利要求6所述的方法,其特征在于,同等特征参数情况下,连续检测区中的光斑具有更高的权重被判别为接触网零部件。
8.如权利要求4所述的方法,其特征在于,所述双目数据关联处理过程还包括标注光斑的信息更新,所述光斑信息更新时采用orb不变特征亚像素中心点作为已配对、具有零部件类别标记但未配对光斑亚像素坐标进行更新;并作为标记光斑,连带对应的光斑参数输出。
9.如权利要求4所述的方法,其特征在于,还包括激光样条,根据光斑相对于激光样条的位置信息,进行定位纠偏,更新亚像素坐标。
10.如权利要求4所述的方法,其特征在于,所述激光样条是一条细长光斑,采用最小二乘法拟合为直线。
技术总结
本申请公开了一种便携式双目接触网几何参数检测系统及方法,该系统包括小车走行平台,以及固定在所述小车走行平台上的双目测量组件、推杆组件及上位机;所述双目测量组件包括线激光器和两个面阵数字相机,线激光器持续向上投射激光束到接触网上,两个面阵数字相机左右布局、随着所述小车走行平台在所述轨道上的移动向上持续拍摄激光束在接触网上的光幕靶图片,发送至上位机;所述上位机接收光幕靶图片并通过双目几何参数检测方法计算接触网的几何参数,形成接触网状态观测数据,本申请记载的系统及方法具有对接触网几何参数快速连续测量、测量精度高、测量效率高的优势,解决了传统人工测量效率低、且为单点测量不能连续测量的缺点。
技术研发人员:王春来,林瀚,屈文涛,郑传福,王光,周金辉,胡耿,欧阳雯,邓李生
受保护的技术使用者:四川拓及轨道交通设备股份有限公司
技术研发日:
技术公布日:2024/4/29
- 还没有人留言评论。精彩留言会获得点赞!