一种阵列传感器校正方法与流程
本发明涉及阵列传感器校正的,尤其是涉及一种阵列传感器校正方法。
背景技术:
1、大规模、高空间分辨率的隧穿磁阻传感器阵列可以实现快速高分辨率地检测成像。在阵列中,由于制作工艺偏差,每一个传感器都有其自身的个性化参数,这些传感器的性能,如灵敏度和特性阻抗等通常并不一致,这可能导致在测量相同的缺陷信号时,传感器的响应的不同。
2、tmr传感器具有空间分辨率高、磁场灵敏度高和功耗低等优点,因此,tmr传感器非常适合用于磁场成像应用,然而tmr传感器的特征参数不尽相同,所以需要提前校准以获得高质量磁场图像。
3、最常见的校准方法是使用均匀磁场,例如亥姆霍兹线圈产生的磁场用于校准。根据采集到的信号计算出每一个传感器对应的校准系数。但这种方法需要额外的、均匀的校准磁场。而校准过程中磁场的均匀性会对校准结果产生严重影响,尤其是对于大规模传感器阵列。有学者提出了惯性传感器和磁传感器的统一传感器模型,以及一种新型传感器参数估计方法来校准传感器。还有学者提出了一种线圈传感器现场校准的时域拟合方法。构建了校准系数与线圈传感器零输入响应之间的关系,并设计了一种优化算法来抑制线圈涡流效应。通过设计线圈的结构和尺寸,校准了微系统中传感器的准确度,然而离线校准会造成额外的时间成本,且校准效果受环境影响。无法良好的校准传感器的灵敏度参数。
技术实现思路
1、本发明的目的是提供一种阵列传感器校正方法,用于在使用的阵列传感器进行灵敏度校准,不需要复杂的校准设备,减少了投入,并且校准过程与采集过程并行,无需停止检测再校准,节约了时间;校正过程最大程度地使传感器灵敏度趋于一致,便于输出后端图像进行处理。
2、为实现上述目的,本发明提供了一种阵列传感器校正方法,包括以下步骤:
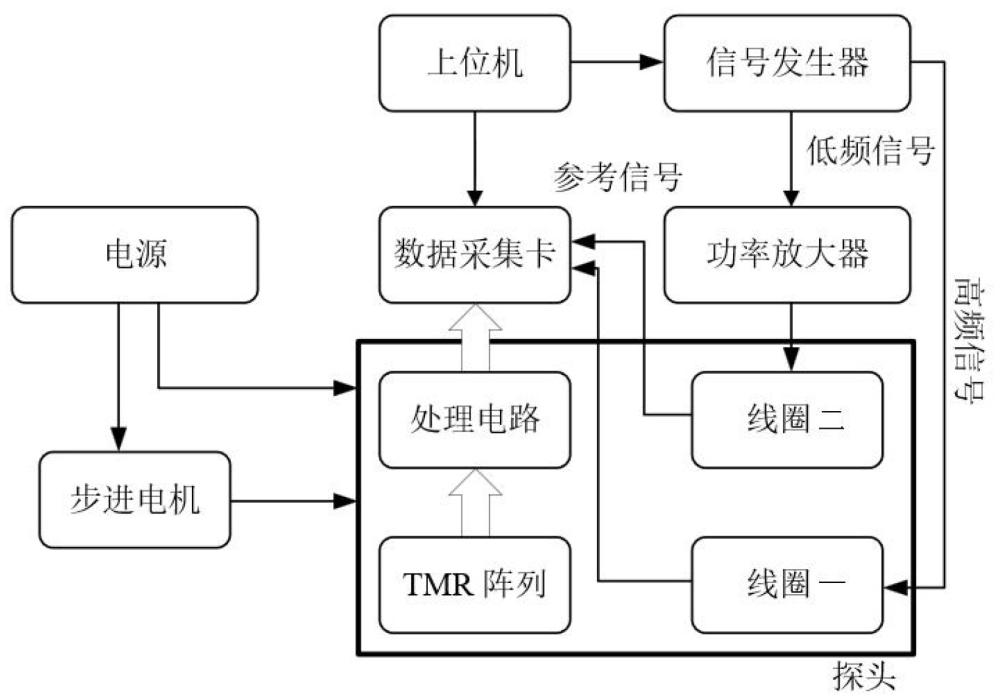
3、s1:组建测试平台,设置双激励线圈阵列探头,包括线圈一、线圈二和tmr阵列传感器;
4、s2:对探头中的两个线圈分别加载电流,形成多频磁场激励,使用机械系统移动探测头对无缺陷的样品进行检测,采集对应的多频响应结果;
5、s3:依据多频响应结果,从tmr阵列传感器中选取一个为参考传感器,计算tmr阵列传感器中其他传感器与参考传感器的信号误差矩阵;
6、s4:通过信号误差矩阵计算校正参数矩阵,使用校正参数矩阵对tmr阵列传感器进行校正;
7、s5:校正后的探头用于检测。
8、优选的,步骤s1中,线圈一和线圈二均采用直径为0.3 mm的铜线绕制,线圈一在yz平面上绕制,圈数沿x方向增长,匝数为90匝,线圈二在xy平面上绕制,圈数沿z方向增长,匝数为400匝;
9、所述tmr阵列传感器设置为32个单元,tmr阵列传感器的灵敏方向沿z轴方向,测量磁场的z方向分量。
10、优选的,步骤s2中,对两个线圈分别加载电流,线圈一通入高频的电流,该电流在导电样品中产生的涡流相对集中于样品表面;线圈二通入低频的电流,该电流用于产生强磁场,且设置是的整数倍。
11、优选的,步骤s3中,计算信号误差矩阵的过程如下:
12、依据采集的多频响应,计算公式如下:
13、;
14、上式中,为一个高频周期内数据的采样点数,为数据采集系统的采样频率,a、b、c都是整数,为参考传感器第b个高频周期内的第i个数据,为所选传感器第a个高频周期内的第i个数据,为所选传感器第a个周期和参考传感器第b个周期的误差,通过公式(1)计算信号误差矩阵如下:
15、;
16、上式结果为信号误差矩阵。
17、优选的,步骤s4中,依据信号误差矩阵,计算校正参数矩阵的过程如下:
18、计算出信号误差矩阵中每一行的最小值,公式如下:
19、;
20、上式表示所选传感器的第个高频周期与参考传感器的第b个高频周期的灵敏度相似度最高;
21、计算的平均值向量,公式如下:
22、;
23、上式中,为tmr阵列传感器的任意一个单元,对于参考传感器的第b个高频周期,所选传感器的平均信号误差是;
24、计算所选传感器中平均信号误差最小的高频周期bm,公式如下:
25、;
26、上式中需要设定b的取值范围,公式如下:
27、;
28、上式中,为一个低频周期中高频周期的个数,为正整数;
29、通过每个传感器最接近的高频周期位置,形成校正参数矩阵,校正参数矩阵的公式(7)如下:
30、;
31、使用校正参数矩阵对tmr阵列传感器进行校正。
32、因此,本发明采用上述方法的一种阵列传感器校正方法,具有以下好处:
33、(1)在本发明中,分别设置线圈一与线圈二,其中一个激励线圈用于传感器灵敏度校正,另一个激励线圈用于检测磁场,从而让校正和检测并行执行,提高检测效率;
34、(2)在本发明中,不需要均匀磁场辅助校正,用探头对无缺陷样品检测来进行校正,通过校正使得每个传感器对样品中无缺陷位置有相似的高频响应,最大程度地使传感器灵敏度趋于一致,便于输出后端图像进行处理;
35、(3)在本发明中,设备集成简单,不需要额外的设备进行辅助校准。
36、下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
技术特征:
1.一种阵列传感器校正方法,其特征在于:包括以下步骤:
2.根据权利要求1所述的一种阵列传感器校正方法,其特征在于:步骤s1中,线圈一和线圈二均采用直径为0.3 mm的铜线绕制,线圈一在yz平面上绕制,圈数沿x方向增长,匝数为90匝,线圈二在xy平面上绕制,圈数沿z方向增长,匝数为400匝;
3.根据权利要求1所述的一种阵列传感器校正方法,其特征在于:步骤s2中,对两个线圈分别加载电流,线圈一通入高频的电流,该电流在导电样品中产生的涡流相对集中于样品表面;线圈二通入低频的电流,该电流用于产生强磁场,且设置是的整数倍。
4.根据权利要求3所述的一种阵列传感器校正方法,其特征在于:步骤s3中,计算信号误差矩阵的过程如下:
5.根据权利要求4所述的一种阵列传感器校正方法,其特征在于:步骤s4中,依据信号误差矩阵,计算校正参数矩阵的过程如下:
技术总结
本发明公开了一种阵列传感器校正方法,属于电磁测量领域;包括以下步骤,S1:组建测试平台,设置双激励线圈阵列探头,包括线圈一、线圈二和TMR阵列传感器;S2:对探头中的两个线圈分别加载电流,形成多频磁场激励,使用机械系统移动探测头对无缺陷的样品进行检测,采集对应的多频响应结果;S3:依据多频响应结果,从TMR阵列传感器中选取一个为参考传感器,计算TMR阵列传感器中其他传感器与参考传感器的信号误差矩阵;S4:通过信号误差矩阵计算校正参数矩阵,使用校正参数矩阵对TMR阵列传感器进行校正;S5:校正后的探头用于检测。本发明采用上述方法,通过双激励线圈阵列探头调节传感器的灵敏度,不需要复杂的校准设备,减少了投入。
技术研发人员:叶朝锋,陶钰,汪洋
受保护的技术使用者:上海渺知科技有限公司
技术研发日:
技术公布日:2024/5/8
- 还没有人留言评论。精彩留言会获得点赞!