机械手表外桩精确调校方法、装置、设备及介质与流程
本发明涉及机械手表,尤其涉及一种机械手表外桩精确调校方法、装置、计算机设备及存储介质。
背景技术:
1、机械手表的偏振应控制在一定的范围内,以保证手表走时可靠、准确。目前,通常采用校表仪识别机械手表的偏振数据,人手进行偏振的调整,一般是调整外桩(或外桩环)角度,从而带动内桩、游丝、摆轴、双圆盘、圆盘钉等整体转动相应角度,使圆盘钉处在平衡位置或者允许的平衡位置附近,进而使偏振满足允差。但是,这种通过人手操作的方式实现对机械手表偏振的调校,因机械手表的机芯零件小而导致效率低。
技术实现思路
1、本发明实施例提供了一种机械手表外桩精确调校方法、装置、计算机设备及存储介质,旨在解决现有技术中通过人手操作的方式实现对机械手表偏振的调校,因机械手表的机芯零件小而导致效率低的问题。
2、第一方面,本发明实施例提供了一种机械手表外桩精确调校方法,其包括:
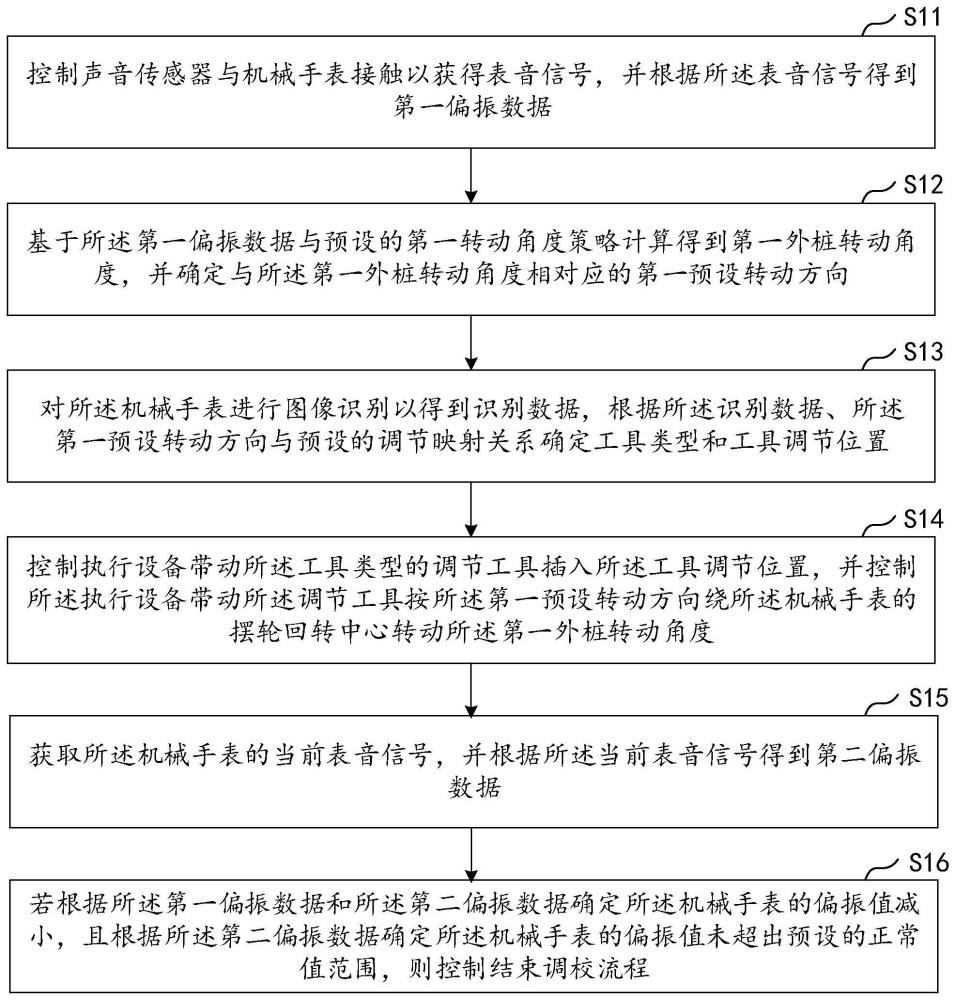
3、控制声音传感器与机械手表接触以获得表音信号,并根据所述表音信号得到第一偏振数据;
4、基于所述第一偏振数据与预设的第一转动角度策略计算得到第一外桩转动角度,并确定与所述第一外桩转动角度相对应的第一预设转动方向;
5、对所述机械手表进行图像识别以得到识别数据,根据所述识别数据、所述第一预设转动方向与预设的调节映射关系确定工具类型和工具调节位置;
6、控制执行设备带动所述工具类型的调节工具插入所述工具调节位置,并控制所述执行设备带动所述调节工具按所述第一预设转动方向绕所述机械手表的摆轮回转中心转动所述第一外桩转动角度;
7、获取所述机械手表的当前表音信号,并根据所述当前表音信号得到第二偏振数据;
8、若根据所述第一偏振数据和所述第二偏振数据确定所述机械手表的偏振值减小,且根据所述第二偏振数据确定所述机械手表的偏振值未超出预设的正常值范围,则控制结束调校流程。
9、第二方面,本发明实施例提供了一种机械手表外桩精确调校装置,其包括:
10、第一数据获取单元,用于控制声音传感器与机械手表接触以获得表音信号,并根据所述表音信号得到第一偏振数据;
11、第一角度获取单元,用于基于所述第一偏振数据与预设的第一转动角度策略计算得到第一外桩转动角度,并确定与所述第一外桩转动角度相对应的第一预设转动方向;
12、图像识别单元,用于对所述机械手表进行图像识别以得到识别数据,根据所述识别数据、所述第一预设转动方向与预设的调节映射关系确定工具类型和工具调节位置;
13、转动控制单元,用于控制执行设备带动所述工具类型的调节工具插入所述工具调节位置,并控制所述执行设备带动所述调节工具按所述第一预设转动方向绕所述机械手表的摆轮回转中心转动所述第一外桩转动角度;
14、第二数据获取单元,用于获取所述机械手表的当前表音信号,并根据所述当前表音信号得到第二偏振数据;
15、调校结束单元,用于若根据所述第一偏振数据和所述第二偏振数据确定所述机械手表的偏振值减小,且根据所述第二偏振数据确定所述机械手表的偏振值未超出预设的正常值范围,则控制结束调校流程。
16、第三方面,本发明实施例又提供了一种计算机设备,其包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,处理器执行计算机程序时实现上述第一方面的机械手表外桩精确调校方法。
17、第四方面,本发明实施例还提供了一种计算机可读存储介质,其中计算机可读存储介质存储有计算机程序,计算机程序当被处理器执行时使处理器执行上述第一方面的机械手表外桩精确调校方法。
18、本发明实施例提供了机械手表外桩精确调校方法、装置、设备及介质,该方法通过机械手表的表音信号得到第一偏振数据;基于第一偏振数据与第一转动角度策略得到第一外桩转动角度及相对应的第一预设转动方向,并结合图像识别得到的识别数据与调节映射关系确定工具类型和工具调节位置;控制执行设备带动该工具类型的调节工具插入工具调节位置并按第一预设转动方向绕机械手表的摆轮回转中心转动第一外桩转动角度;若根据第一偏振数据和通过当前表音信号得到的第二偏振数据确定机械手表的偏振值减小且未超出正常值范围,则结束流程。本发明基于机械手表的偏振数据控制执行设备带动调节工具进行偏振调校,可以准确且快速地调整机械手表的偏振,提高调校效率。
技术特征:
1.一种机械手表外桩精确调校方法,其特征在于,包括:
2.根据权利要求1所述的机械手表外桩精确调校方法,其特征在于,在所述获取所述机械手表的当前表音信号,并根据所述当前表音信号得到第二偏振数据的步骤之后,还包括:
3.根据权利要求2所述的机械手表外桩精确调校方法,其特征在于,所述根据预设的角度策略得到第二外桩转动角度,包括:
4.根据权利要求1或2所述的机械手表外桩精确调校方法,其特征在于,在所述获取所述机械手表的当前表音信号,并根据所述当前表音信号得到第二偏振数据的步骤之后,还包括:
5.根据权利要求1所述的机械手表外桩精确调校方法,其特征在于,所述第一偏振数据包括第一周期、第一摆幅和第一偏振值;所述基于所述第一偏振数据与预设的第一转动角度策略计算得到第一外桩转动角度,包括:
6.根据权利要求1所述的机械手表外桩精确调校方法,其特征在于,所述对所述机械手表进行图像识别以得到识别数据,根据所述识别数据、所述第一预设转动方向与预设的调节映射关系确定工具类型和工具调节位置,包括:
7.根据权利要求1所述的机械手表外桩精确调校方法,其特征在于,所述控制所述执行设备带动所述调节工具按所述第一预设转动方向绕所述机械手表的摆轮回转中心转动所述第一外桩转动角度,包括:
8.一种机械手表外桩精确调校装置,其特征在于,包括:
9.一种计算机设备,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求1至7中任一项所述的机械手表外桩精确调校方法。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机程序,所述计算机程序当被处理器执行时使所述处理器执行如权利要求1至7任一项所述的机械手表外桩精确调校方法。
技术总结
本发明公开了机械手表外桩精确调校方法、装置、设备及介质,该方法通过机械手表的表音信号得到第一偏振数据;基于第一偏振数据与第一转动角度策略得到第一外桩转动角度及相对应的第一预设转动方向,并结合图像识别得到的识别数据与调节映射关系确定工具类型和工具调节位置;控制执行设备带动该工具类型的调节工具插入工具调节位置并按第一预设转动方向绕机械手表的摆轮回转中心转动第一外桩转动角度;若根据第一偏振数据和通过当前表音信号得到的第二偏振数据确定机械手表的偏振值减小且未超出正常值范围,则结束流程。本发明基于机械手表的偏振数据控制执行设备带动调节工具进行偏振调校,可以准确且快速地调整机械手表的偏振,提高调校效率。
技术研发人员:白辉,戴逸豪,马涛,郑勇
受保护的技术使用者:天王电子(深圳)有限公司
技术研发日:
技术公布日:2024/2/25
- 还没有人留言评论。精彩留言会获得点赞!