基于多特征活动桩优化迭代的预弯柔性探针路径规划方法
1.本发明属于智能医疗机器人控制与决策领域,特别是一种柔性针穿刺路径规划方法,具体为基于多特征活动桩优化迭代的预弯柔性探针路径规划方法。
背景技术:
2.柔性针穿刺时其针尖会产生偏转而形成弧线穿刺,从而可以进行避障规划,在此基础上,采用套管针芯配合的预弯柔性探针,可获取可控的多曲率穿刺弧线,有助于路径规划的多样性。柔性针穿刺路径规划方法大致分为搜索法、数值法和反解法三类(张永德,赵燕江,涂飞,等.柔性针穿刺路径规划综述[j].哈尔滨理工大学学报,2011(04):7-11.),现有的专利主要采用前两类。搜索法即在空间中以某种方式探索基础点,最终连接成到达终点的路径,例如随机树算法、狼群算法。2019年北京航空航天大学张辉等人提出了一种基于狼群算法的穿刺机器人柔性针运动路径规划方法(发明专利公开号:cn110083156a):在构建柔性针穿刺路径模型和路径优化目标函数的基础上,将生成到靶点的路径作为人工狼,以路径目标函数值作为更新头狼位置的标准,根据穿刺路径模型的约束条件来获得最优路径。该方案虽能实现复杂环境下的规划,但收敛速度慢且不一定能求得最优解。2020年浙江工业大学张丹等人提出一种基于二阶振荡粒子群优化算法的柔性穿刺针路径规划方法(发明专利公开号:cn111821022a):在标准粒子群优化算法的基础上,改进速度更新公式、引入振荡环节来增强种群的多样性,从而获取全局优化解。但是由于参数量较少,难以适应复杂穿刺环境。
[0003]
数值法利用目标函数最大或最小值来获取最优路径,主要有目标函数法和概率法。目标函数法是基于优化指标(如路径最短,绕开障碍物等)建立目标函数,对其求解得到最优值。2014年梁萍等人提出了一种消融针穿刺路径规划方法及系统(发明专利授权号:cn103970988b):将肿瘤靶点周围设为扇形的若干进针分区域,每区域规划一条避障路径,最终通过象征消融效率特征的消融比来进行择优。概率法是考虑路径误差的随机性,利用数学概率原理计算穿刺成功率最大的路径。2017年湘潭大学李鹏等人提出基于环境特征和随机算法的柔性针路径规划方法(发明专利公开号:cn106650298a):通过障碍分级调整路径评估函数权重系数,从而可针对环境求得不同优化解,但所求路径较复杂不一定满足柔性针穿刺特征。
[0004]
综上所述,搜索法一般不能很好的引入柔性针特征,对于复杂环境很难得到最优解;数值法一般需要遍历所有可能,耗时较长,与函数模型相关。
技术实现要素:
[0005]
为了克服现有技术的不足和缺陷,本发明提出基于多特征活动桩优化迭代的路径规划方法,其优化对象为基于预弯柔性探针的路径规划,优化结果是能够有效避障的穿刺路径。
[0006]
实现本发明目的的技术解决方案为:
[0007]
一种基于多特征活动桩优化迭代的预弯柔性探针路径规划方法,包括以下步骤:
[0008]
步骤1、获取基于预弯柔性探针路径规划的基础信息,包括由预弯柔性探针穿刺特性获取的第i次伸长对应的穿刺弧线多曲率特征ri、采集的障碍信息集合及穿刺起点、终点位置;起点和终点间的连线定为弹力线,并根据弹力线的最大伸长量规范活动桩搜索区域;
[0009]
步骤2、由障碍稀疏程度确定活动桩搜索个数n;
[0010]
步骤3、在活动桩搜索区域设置随机点,判定基于活动桩圆心与随机点重合而得的搜索路径是否为有效路径,根据路径长度择优确定当前最优有效路径,再次生成随机点进行迭代优化当前最优有效路径;
[0011]
步骤4、逐一变更多曲率特征ri重复步骤三直至i到达最大值;然后逐一增加活动桩个数至步骤二确定的个数n,重复上述迭代过程,获得多条当前最优有效路径;
[0012]
步骤5、根据步骤三、四获得的多条当前最优有效路径,建立的综合优化函数得到最终的最优有效路径。
[0013]
本发明与现有技术相比,其显著优点是:
[0014]
(1)通过包含多曲率特征的活动桩拟合随机点改变初始路径进行搜索迭代的方式,在随机搜索迭代过程中快速形成符合预弯柔性探针穿刺特性的路径,配合基于有效路径搜索时间的迭代条件,可以在快速得到优化路径的同时减少搜索时长;
[0015]
(2)通过规范活动桩的分布区域,可以缩小合理搜索范围,提高效率;通过障碍分级选择同时搜索个数,可以提高应对复杂环境的能力;
[0016]
(3)通过基于弧线曲率和路径长度的优化函数,可以选取避障的最优路径。
附图说明
[0017]
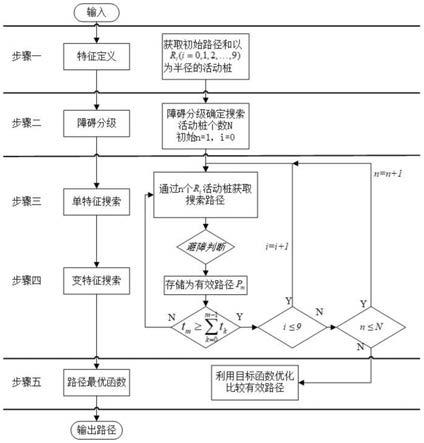
图1为本发明的基于多特征活动桩优化迭代的预弯柔性探针路径规划方法流程图。
[0018]
图2为本发明的活动桩搜索示意图。
具体实施方式
[0019]
下面结合附图及具体实施例对本发明做进一步的介绍。
[0020]
图1所示为路径优化方法总体流程图,本发明基于多特征活动桩优化迭代的预弯柔性探针路径规划方法,具体技术方案包括以下步骤:
[0021]
步骤一、获取基于预弯柔性探针路径规划的基础信息,包括由预弯柔性探针穿刺特性获取的穿刺弧线多曲率特征ri(i=0,1,2,...)和采集的障碍信息集合及起点终点位置。
[0022]
多曲率特征是由预弯针芯相对柔性针套的伸长量决定的,使每次相对伸长量为一个定值如0.5毫米,i为相对伸长次数,对于不同的i可以实验获取对应的多曲率特征ri;获取的障碍信息集合包括障碍的位置、大小,将障碍形状拟合为圆形获取圆心坐标作为障碍的位置,面积作为障碍的大小,起点终点位置为两点的坐标。由此定义多特征活动桩为以多曲率特征ri为半径的圆,固定桩为与穿刺起点、终点位置重合的点,初始路径p0为起点和终点间的连线,将连线定义为有弹性极限的弹力线,使其最大伸长量为2p0,活动桩使弹力线变形不能超过最大伸长量,以此来规范活动桩搜索区域。
[0023]
步骤二、由障碍稀疏程度确定活动桩搜索个数n,障碍稀疏程度由障碍间的平均距离与带系数的初始路径的长度比较来确定,若障碍间的平均距离较大,则定义为稀疏,反之为密集,确定活动桩搜索个数n的数学模型如下:
[0024][0025]
式中b为障碍个数,为正整数;将各个障碍拟合为圆,oa(xa,ya)为第a个障碍的圆心,a为自然数;|p0|为初始路径的长度。通过表征障碍之间的平均距离来评估障碍的稀疏程度,障碍密集,通过增加个数来增加形成路径的复杂程度,路径的复杂程度会降低路径优化值,因此定义最大搜索活动桩个数为2。
[0026]
步骤三、为搜索迭代的过程,活动桩的搜索过程如图2所示,在活动桩搜索区域获取一个随机点xj,确定随机点xj出现的位置在初始路径的哪一侧,使初始路径另一侧的活动桩的圆心移动至与此随机点重合,从而改变弹力线(即初始路径)的形状,弹力线变形后的形状构成搜索路径,其函数模型如式(2)
[0027][0028]
式中pd为路径的特征集合,d为弹力线变形后直线和曲线路径组合数(变形后的弹力线又两段直线和连接两段直线的曲线构成),与搜索活动桩个数n有关(d=2*n1),xj为随机点坐标,ri为穿刺曲率特征,为随机点和初始路径的偏离程度。通过判定路径与障碍信息集合是否有交集,无交集则归为有效路径pm,并且由路径长度择优,短的确立为当前最优有效路径p
m_opt
,再次生成随机点继续搜索迭代,优化当前最优有效路径p
m_opt
,以搜索时间为迭代终止条件,如下:
[0029][0030]
式中tk为第k条有效路径的搜索时间,k=0,1,...,m,式(3)表示第m条有效路径的搜索时间大于等于之前m-1条有效路径搜索时间的总和,定义寻觅时间可以使迭代快速收敛,使搜索过程不用遍历全图,减少搜索时间,由于多曲率特征搜索可以扩大搜索群,因此对每一搜索特征的迭代控制,很大程度上缩短了整体运行时间。
[0031]
步骤四、为多特征迭代过程,包括活动桩的个数特征和多曲率特征,首先在单次迭代终止后,逐一变更多曲率特征ri(i=0,1,2,...)重复步骤三直至i到达最大值;然后逐一增加活动桩个数至步骤二确定的个数n,增加活动桩个数为使用多个随机活动桩来改变弹力线形成搜索路径,多个搜索桩的移动仍然遵守上述的移动条件,并重复上述的多曲率迭代过程,获得多条当前最优有效路径p
m_opt
。
[0032]
步骤五、为选择最优路径,根据步骤三、四每个单次迭代都会获取一条当前最优有效路径p
m_opt
,建立的综合优化函数比较这些有效路径优化值y。综合优化函数选择路径复杂
度、路径长度以及安全度作为优化指标,可知搜索桩的个数越多,形成的路径包含的直线路径和曲线路径的组合就越多,路径越复杂;路径长度影响着穿刺的损伤程度,也成为路径的优化标准;定义路径的安全度为随机点距初始路径的偏离程度,随机点越偏离路径穿刺范围越大,精确度越低,安全度越小。选取每一搜索特征下的优选有效路径进行对比。建立的优化函数数学模型为:
[0033][0034]
式中n为当前路径搜索活动桩个数,为路径长度,为随机点和初始路径的偏离程度,μ1、μ2、μ3为对应的优化指标的权重系数,利用层次分析法确定评价指标的权重,首先根据指标间的重要关系构建判断矩阵a如下表,通过将矩阵的各行向量进行几何平均,然后进行归一化处理,得到各评价指标权重μ1=0.15;μ2=0.63;μ3=0.22。
[0035]
判断矩阵
[0036]
指标复杂度损伤度安全度复杂度11/31/2损伤度314安全度21/41
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1