压电快速反射镜有限时间状态反馈抗扰控制方法
1.本发明涉及一种压电快速反射镜有限时间状态反馈抗扰控制方法。
背景技术:
2.压电快速反射镜是利用压电陶瓷材料的逆压电效应,在电压的作用下产生驱动形变,能够实现微米乃至纳米级别的高精度控制,被广泛应用在光学成像领域,实现光束的高精度控制。具有响应速度快、控制精度高、功耗低等优点。
3.然而,目前针对压电快速反射镜控制的研究大都聚焦在迟滞特性的建模和控制中,考虑压电快速反射镜外部扰动性能的方法仍在持续研究过程中,尚未有一种解决压电快速反射镜在复杂工况下扰动问题的压电快速反射镜有限时间收敛状态反馈抗干扰控制方法。
技术实现要素:
4.有鉴于此,有必要提供一种压电快速反射镜有限时间状态反馈抗扰控制方法。
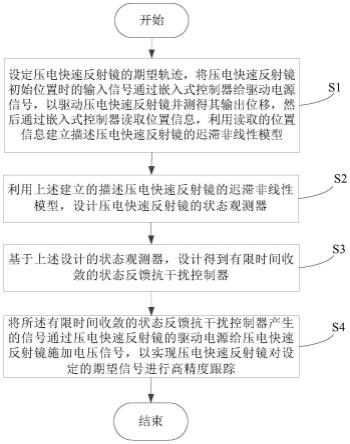
5.本发明提供一种压电快速反射镜有限时间状态反馈抗扰控制方法,该方法包括如下步骤:a.设定压电快速反射镜的期望轨迹,将压电快速反射镜初始位置时的输入信号通过嵌入式控制器给驱动电源信号,以驱动压电快速反射镜并利用位置传感器测得压电快速反射镜的输出位移,然后通过嵌入式控制器读取位置信息,利用读取的位置信息建立描述压电快速反射镜的迟滞非线性模型;b.利用上述建立的描述压电快速反射镜的迟滞非线性模型,设计压电快速反射镜的状态观测器;c.基于上述设计的状态观测器,设计得到有限时间收敛的状态反馈抗干扰控制器;d.将所述有限时间收敛的状态反馈抗干扰控制器产生的信号通过压电快速反射镜的驱动电源给压电快速反射镜施加电压信号,以实现压电快速反射镜对设定的期望信号进行高精度跟踪。
6.优选地,所述迟滞非线性模型的数学表达式为:
[0007][0008]
其中,x代表所述迟滞非线性模型输出位置,u代表驱动压电快速反射镜运动的输入电压,h代表所述迟滞非线性模型的迟滞状态,d代表所述迟滞非线性模型的比例常数,α0、β和γ一般为常数,代表迟滞状态的参数,m和b分别代表压电快速反射镜的质量和阻尼系数。
[0009]
优选地,将公式(1)改写为:
[0010]
[0011]
其中,a1、a2和a3分为定义为分为定义为和α=α0d,y代表所述迟滞非线性模型的输出,x1、x2和x3代表所述迟滞非线性模型的状态,分别为位移、速度和迟滞状态。
[0012]
优选地,所述步骤b包括:
[0013]
根据公式(2),设计压电快速反射镜的状态观测器,所述状态观测器的数学表达式为:
[0014][0015]
其中,代表估计状态,li,i=1,2,3代表状态观测器的增益,驱动压电快速反射镜运动的输入电压u通过有限时间收敛的状态反馈抗干扰控制器上一时刻的输入得到;y通过位置传感器直接测量压电快速反射镜获得。
[0016]
优选地,所述状态观测器增益需满足:
[0017][0018]
优选地,所述的步骤c包括:
[0019]
为了设计有限时间收敛的状态反馈抗干扰控制器,首先定义动态面方程为:
[0020][0021]
其中,e=x
1-xd,x1为此时压电快速反射镜的输出位置信息,是误差的导数,λ1是正常数。
[0022]
优选地,所述的步骤c还包括:
[0023]
根据公式(3)和公式(2),设计有限时间收敛的状态反馈抗干扰控制器表达式如下:
[0024][0025]
其中,其中,是个常数;kd和ω分别是有限时间收敛的状态反馈抗干扰控制器增益。
[0026]
优选地,所述的步骤d包括:
[0027]
经过公式(6)计算获得当前时刻的驱动压电快速反射镜运动的输入电压u,通过嵌入式控制器的d/a模块给驱动电源;通过驱动电源实现压电快速反射镜的位置输出;通过位置传感器测试得到当前时刻的输出位移与期望轨迹的差值是否满足误差要求,若满足则停止进行,若不满足则返回步骤b。
[0028]
本技术通过状态观测器观测了压电快速反射镜的输出速度信号、迟滞状态,减少
了对相关测量传感器的依赖,通过观测的状态设计了状态反馈抗干扰控制器,极大地提高了压电快速反射镜的抗干扰性能,提升了控制品质。
附图说明
[0029]
图1为本发明压电快速反射镜有限时间状态反馈抗扰控制方法的流程图;
[0030]
图2为本发明实施例提供的压电快速反射镜有限时间状态反馈抗扰控制方法的实施逻辑图;
[0031]
图3为本发明实施例提供的压电快速反射镜有限时间状态反馈抗扰控制方法的硬件结构图。
具体实施方式
[0032]
下面结合附图及具体实施例对本发明作进一步详细的说明。
[0033]
参阅图1所示,是本发明压电快速反射镜有限时间状态反馈抗扰控制方法较佳实施例的作业流程图。
[0034]
步骤s1,设定压电快速反射镜的期望轨迹,将压电快速反射镜初始位置时的输入信号通过嵌入式控制器给驱动电源信号,以驱动压电快速反射镜并通过位置传感器测得压电快速反射镜的输出位移,然后通过嵌入式控制器读取位置信息,利用读取的位置信息建立描述压电快速反射镜的迟滞非线性模型。具体而言:
[0035]
请一并结合图2、图3所示,首先设定压电快速反射镜的期望轨迹,并根据图2的控制结构图描述,赋予压电快速反射镜初始位置状态。将压电快速反射镜初始位置时的输入信号通过如图3所示的硬件结构框图中的嵌入式控制器的d/a模块给驱动电源一个信号,然后驱动压电快速反射镜,采用位置传感器测得压电快速反射镜的输出位移,然后通过嵌入式控制器的a/d模块读取位置信息,并通过上位机进行数据显示。最后,利用读取的位置信息建立能够描述压电快速反射镜的迟滞非线性模型,所述迟滞非线性模型的数学表达式为:
[0036][0037]
其中,x代表所述迟滞非线性模型输出位置,u代表所述驱动压电快速反射镜运动的输入电压,h代表所述迟滞非线性模型的迟滞状态,d代表所述迟滞非线性模型的比例常数,α0、β和γ一般为常数,代表迟滞状态的参数,m和b分别代表压电快速反射镜的质量和阻尼系数。为了便于状态观测器的设计,将公式(1)改写为:
[0038][0039]
其中,a1、a2和a3分为定义为
和α=α0d,y代表所述迟滞非线性模型的输出,x1、x2和x3代表所述迟滞非线性模型的状态,分别为位移、速度和迟滞状态。
[0040]
值得注意的是,本实施例中状态观测器、有限时间收敛的状态反馈抗干扰控制器均是安装于所述嵌入式控制器的软件
[0041]
步骤s2,利用上述建立的描述压电快速反射镜的迟滞非线性模型,设计压电快速反射镜的状态观测器。具体而言:
[0042]
根据公式(2),设计压电快速反射镜的状态观测器。所述状态观测器的数学表达式为:
[0043][0044]
其中,代表估计状态,li,i=1,2,3代表状态观测器的增益。此时,驱动压电快速反射镜运动的输入电压u通过有限时间收敛的状态反馈抗干扰控制器上一时刻的输入得到;y通过位置传感器直接测量压电快速反射镜获得。为了满足状态观测器收敛性,所述状态观测器增益需满足:
[0045][0046]
步骤s3,基于上述设计的状态观测器,设计得到有限时间收敛的状态反馈抗干扰控制器。具体而言:
[0047]
设计基于状态观测器的有限时间收敛的状态反馈抗干扰控制器。为了设计有限时间收敛的状态反馈抗干扰控制器,首先定义动态面方程为:
[0048][0049]
其中,e=x
1-xd,x1为此时压电快速反射镜的输出位置信息,是误差的导数,λ1是正常数。随后,根据公式(3)和公式(2),设计有限时间收敛的状态反馈抗干扰控制器表达式如下:
[0050][0051]
其中,其中,是个常数;kd和ω分别是有限时间收敛的状态反馈抗干扰控制器增益。
[0052]
步骤s4,将所述有限时间收敛的状态反馈抗干扰控制器产生的信号通过压电快速反射镜的驱动电源给压电快速反射镜施加电压信号,以实现压电快速反射镜对设定的期望信号进行高精度跟踪。具体而言:
[0053]
经过公式(6)计算获得当前时刻的驱动压电快速反射镜运动的输入电压u,通过嵌入式控制器的d/a模块给驱动电源。然后,通过驱动电源实现压电快速反射镜的位置输出,
此时通过位置传感器测试得到当前时刻的输出位移与期望轨迹的差值是否满足误差要求,若满足则停止进行,若不满足则返回步骤s2。
[0054]
本技术通过综合考虑压电快速反射镜的工作环境中遭受的外部扰动问题,既保证了压电快速反射镜的抗干扰性性能,又提高了控制器的收敛速度,为压电快速反射镜在高精度光学成像领域的应用奠定了坚实的技术基础。
[0055]
虽然本发明参照当前的较佳实施方式进行了描述,但本领域的技术人员应能理解,上述较佳实施方式仅用来说明本发明,并非用来限定本发明的保护范围,任何在本发明的精神和原则范围之内,所做的任何修饰、等效替换、改进等,均应包含在本发明的权利保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1