一种非线性系统的高阶扩展强跟踪滤波器
1.本发明涉及高阶扩展滤波技术领域,具体地说,涉及一种非线性系统的高阶扩展强跟踪滤波器。
背景技术:
2.过滤技术受到了广泛的关注,并在弹道导弹防御、多目标攻击、民用飞机和空中交通管制等多个领域得到了应用了许多滤波器,滤波器在使用的过程中,常会引用隐式变量,但在隐式变量引入时,会造成建模误差和状态突变问题,且在计算舍入误差时,无论是简单函数还是复杂函数,都需要复杂的方法,如carleman近似或kronecker幂,运算。
3.计算舍入误差时,计算程度复杂,且在计算过程中引入的隐变量容易导致系统不稳定,从而增大系统运算数据的准确性。
技术实现要素:
4.本发明的目的在于提供一种非线性系统的高阶扩展强跟踪滤波器,以解决上述背景技术中提出的问题。
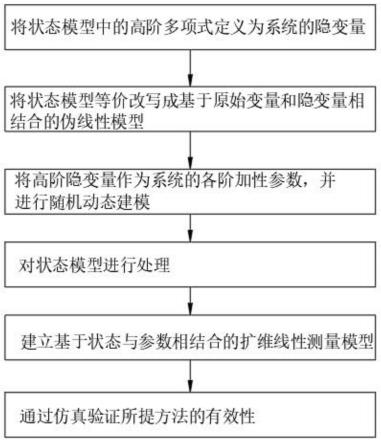
5.为实现上述目的,本发明提供一种非线性系统的高阶扩展强跟踪滤波器,滤波方法包括以下步骤:
6.将状态模型中的高阶多项式定义为系统的隐变量;
7.将状态模型等价改写成基于原始变量和隐变量相结合的伪线性模型;
8.将高阶隐变量作为系统的各阶加性参数,并进行随机动态建模;
9.对状态模型进行处理;
10.建立基于状态与参数相结合的扩维线性测量模型;
11.通过仿真验证所提方法的有效性。
12.作为本技术方案的进一步改进,建立伪线性模型的步骤如下:
13.描述系统;
14.伪线性化表示非线性系统。
15.作为本技术方案的进一步改进,在描述系统时,需要给定对状态模型具有强非线性特性复杂动态系统,其给定公式为:
16.x(k+1)=f(x(k))+w(k)
17.y(k+1)=h(x(k+1)+v(k+1)
18.其中,x(k)∈rn为n维状态向量,y(k)∈rm表示m维测量向量,f(x(k))和h(x(k+1))分别表示为状态变换函数和测量函数,分别表示为状态变换函数和测量函数,w(k)和v(k+1)分别为过程噪声和测量噪声,并满足e(w(k))=0时,e{w(k)w
t
(j)}=q(k)δ
kj
,e{v(k)}
=0,e{v(k)v
t
(j)}=r(k)δ
kj
;q(k)为半正定对称矩阵,r(k)为正定对称矩阵;当k=j时,δ
kj
=1;否则,δ
kj
=0。
19.作为本技术方案的进一步改进,伪线性化表示非线性系统时,需将状态模型转换的状态转移函数fi(x(k))进行假设,使m=n=2,其公式如下:
[0020][0021][0022]
其中,为所有l阶张量之和;表示各阶张量对应的权重。
[0023]
作为本技术方案的进一步改进,在建立伪线性模型过程中,需要对转态转移函数进行伪线性扩维;
[0024]
定义为l阶隐变量集合;
[0025]
定义为l阶隐变量对应的权重向量,其扩展的公式为:
[0026][0027]
作为本技术方案的进一步改进,建立扩维线性测量模型需要将伪线性模型转化成线性形式,转化线性形式前需要建立l阶隐变量x
(l)
(k+1)和u阶隐变量之间的动态关系,其公式如下:
[0028][0029]
其中,根据原始状态的输入信息进行辨识,当在没有任何先验信息的情况下,对其设置如下:
[0030][0031]
根据l阶隐变量集合、l阶隐变量对应的权重向量和伪线性扩维扩维公式,建立线性矩阵形式:
[0032][0033]
令x(k)=[(x
(1)
(k))
t
,(x
(2)
(k))
t
,
…
,(x
(l)
(k))
t
,
…
,(x
(r)
(k))
t
]
t
[0034][0035]
其中,m,o,l为
…
,w(k)为建模误差。
[0036]
作为本技术方案的进一步改进,根据伪线性模型转化成线性形式进行推测测量模型的线性矩阵形式:
[0037][0038]
对线性矩阵形式进行线性化表示为:
[0039]
x(k+1)=a(k+1,k)x(k)+tf(k)+w(k)
[0040]
y(k+1)=h(k+1)x(k+1)+th(k+1)+v(k+1)
[0041]
其中,v(k+1)为建模误差。
[0042]
作为本技术方案的进一步改进,在使用仿真验证所提方法的有效性时,需要确定其滤波步骤,其步骤如下:
[0043]
初始化;
[0044]
迭代滤波器;
[0045]
时间更新;
[0046]
测量更新。
[0047]
作为本技术方案的进一步改进,初始化时需要根据原始系统的状态和协方差矩阵初始值进行操作,其公式为:
[0048][0049]
其中,为半正定矩阵。
[0050]
作为本技术方案的进一步改进,在进行迭代滤波器操作时,需要计算其对应的协
方差矩阵,其矩阵公式为:
[0051][0052]
其中,y(1),y(2),
…
,y(k),及p(k|k)为输入数值。
[0053]
与现有技术相比,本发明的有益效果:
[0054]
1、该非线性系统的高阶扩展强跟踪滤波器中,通过将状态模型的数据通过隐变量和原始变量来建立伪线性模型,来过滤隐变量加入到系统中对系统波动的影响,进而保证系统运算数据的准确性。
[0055]
2、该非线性系统的高阶扩展强跟踪滤波器中,通过将伪线性模型进行线性的转化,以降低在计算舍入误差时的计算复杂程度,使舍入误差计算的方法变得简单,加快系统计算舍入误差的速度。
附图说明
[0056]
图1为本发明实施例1的整体流程框图;
[0057]
图2为本发明实施例1的滤波过程流程框图;
[0058]
图3为本发明案例一的stf与h-stf的x1折线对比图之一;
[0059]
图4为本发明案例一的stf与h-stf的x2折线对比图之一;
[0060]
图5为本发明案例一的h-stf和ekf的x1、x2折线对比图;
[0061]
图6为本发明案例二的stf与h-stf的x1折线对比图之一;
[0062]
图7为本发明案例二的stf与h-stf的x2折线对比图之一;
[0063]
图8为本发明案例二的h-stf和ekf的x1、x2折线对比图;、
[0064]
图9为本发明案例三的stf与h-stf的x1折线对比图之一;
[0065]
图10为本发明案例三的stf与h-stf的x2折线对比图之一;
[0066]
图11为本发明案例三的h-stf和ekf的x1、x2折线对比图。
具体实施方式
[0067]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0068]
在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的设备或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
[0069]
实施例1
[0070]
本发明提供一种非线性系统的高阶扩展强跟踪滤波器,请参阅图1和图2,滤波方法包括以下步骤:
[0071]
将状态模型中的高阶多项式定义为系统的隐变量;
[0072]
将状态模型等价改写成基于原始变量和隐变量相结合的伪线性模型;
[0073]
将高阶隐变量作为系统的各阶加性参数,并进行随机动态建模;
[0074]
对状态模型进行处理;
[0075]
建立基于状态与参数相结合的扩维线性测量模型;
[0076]
通过仿真验证所提方法的有效性。
[0077]
作为本技术方案的进一步改进,建立伪线性模型的步骤如下:
[0078]
描述系统;
[0079]
伪线性化表示非线性系统。
[0080]
进一步的,在描述系统时,需要给定对状态模型具有强非线性特性复杂动态系统,其给定公式为:
[0081]
x(k+1)=f(x(k))+w(k)
[0082]
y(k+1)=h(x(k+1)+v(k+1)
[0083]
其中,x(k)∈rn为n维状态向量,y(k)∈rm表示m维测量向量,f(x(k))和h(x(k+1))分别表示为状态变换函数和测量函数,分别表示为状态变换函数和测量函数,w(k)和v(k+1)分别为过程噪声和测量噪声,并满足e(w(k))=0时,e{w(k)w
t
(j)}=q(k)δ
kj
,e{v(k)}=0,e{v(k)v
t
(j)}=r(k)δ
kj
;q(k)为半正定对称矩阵,r(k)为正定对称矩阵;当k=j时,δ
kj
=1;否则,δ
kj
=0。
[0084]
其中,伪线性化表示非线性系统时,需将状态模型转换的状态转移函数fi(x(k))进行假设,使m=n=2,其公式如下:
[0085][0086][0087]
其中,为所有l阶张量之和;表示各阶张量对应的权重。
[0088]
外外,在建立伪线性模型过程中,需要对转态转移函数进行伪线性扩维;
[0089]
定义为l阶隐变量集合;
[0090]
定义为l阶隐变量对应的权重向量,其扩展的公式为:
[0091][0092]
具体的,建立扩维线性测量模型需要将伪线性模型转化成线性形式,转化线性形式前需要建立l阶隐变量x
(l)
(k+1)和u阶隐变量之间的动态关系,其公式如下:
[0093][0094]
其中,根据原始状态的输入信息进行辨识,当在没有任何先验信息的情况下,对其设置如下:
[0095][0096]
根据l阶隐变量集合、l阶隐变量对应的权重向量和伪线性扩维扩维公式,建立线性矩阵形式:
[0097][0098]
令x(k)=[(x
(1)
(k))
t
,(x
(2)
(k))
t
,
…
,(x
(l)
(k))
t
,
…
,(x
(r)
(k))
t
]
t
[0099][0100]
其中,m,o,l为
…
,w(k)为建模误差。
[0101]
进一步的,根据伪线性模型转化成线性形式进行推测测量模型的线性矩阵形式:
[0102][0103]
对线性矩阵形式进行线性化表示为:
[0104]
x(k+1)=a(k+1,k)x(k)+tf(k)+w(k)
[0105]
y(k+1)=h(k+1)x(k+1)+th(k+1)+v(k+1)
[0106]
其中,v(k+1)为建模误差。
[0107]
作为本技术方案的进一步改进,在使用仿真验证所提方法的有效性时,需要确定其滤波步骤,其步骤如下:
[0108]
初始化;
[0109]
初始化时需要根据原始系统的状态和协方差矩阵初始值进行操作,其公式为:
[0110][0111]
其中,为半正定矩阵。
[0112]
迭代滤波器;
[0113]
在进行迭代滤波器操作时,需要计算其对应的协方差矩阵,其矩阵公式为:
[0114][0115]
其中,y(1),y(2),
…
,y(k),及p(k|k)为输入数值。
[0116]
时间更新;
[0117][0118][0119]
矩阵范数或直接矩阵内所有元素求和,在λ的取值范围内,利用遍历的方法,
[0120]
找到λ和θ,其中,
[0121][0122]
n(k+1)=v0(k+1)-h(k+1)q(k)h
t
(k+1)-β
·
r(k+1)
[0123]
m(k+1)=h(k+1)a(k+1,k)p(k|k)a
t
(k+1,k)h
t
(k+1)
[0124][0125]
β≥1为一个选定的弱化因子。引入此弱化因子的目的是使得状态估计值更加平滑。
[0126]
测量更新;
[0127]
k(k+1)=p(k+1|k)h
t
(k+1)[h(k+1)p(k+1|k)h
t
(k+1)+rv(k+1)]-1
[0128][0129]
p(k+1|k+1)=[i-k(k+1)h(k+1)]p(k+1|k)。
[0130]
案例分析:
[0131]
案例一、参考图3-图5,给定如下非线性离散动态系统:状态为非线性模型,测量为线性模型。
[0132][0133][0134][0135]
其中,模型噪声有如下统计特性,w(k)=n(0,0.01),v(k+1)=n(0,0.01);x0=[0 0]
t
,p0=i2×2[0136]
表1 stf与h-stf之间的误差比较
[0137]
过滤器mes的为x1mes的为x2messtf0.12660.11660.1216h-stf0.10150.10520.1033误差比较19.83%9.78%15.05%
[0138]
案例二、参考图6-图8;
[0139][0140]
表2 stf与h-stf之间的误差比较
[0141]
过滤器mes的为x1mes的为x2messtf0.11320.10160.1074h-stf0.09250.09370.0931误差比较18.29%7.78%13.31%
[0142]
案例三、参考图9-图11;
[0143][0144][0145]
[0146][0147]
其中,
[0148]
表3 stf与h-stf之间的误差比较
[0149]
过滤器mes的为x1mes的为x2messtf0.11970.11960.1196h-stf0.09490.11450.1047误差比较20.72%4.26%12.46%
[0150]
以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的仅为本发明的优选例,并不用来限制本发明,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1