基于LSTM逆向模型的半主动控制方法、装置、设备和存储介质
基于lstm逆向模型的半主动控制方法、装置、设备和存储介质
技术领域
1.本发明涉及斜拉桥的拉索振动控制技术领域,特别涉及一种基于lstm逆向模型的半主动控制方法、装置、设备和存储介质。
背景技术:
2.斜拉桥作为中、大跨桥梁中最具竞争力的桥型之一,其跨径随着现代桥梁设计理论及建筑材料的发展不断增大。拉索作为斜拉桥的主要受力结构之一,其长度也随着桥梁跨径日益增长,导致刚度、阻尼比随着长细比的增大逐渐降低。拉索在外荷载激励下更容易发生大幅振动,严重危害桥梁结构的安全。
3.细长拉索在外荷载(主要是风荷载)作用下的振动机理相当复杂,如何控制拉索振动是众多学者关注的重点问题。随着桥梁跨径的增大,传统的控制装置及措施难以满足大跨斜拉桥的设计需求。智能材料和现代控制理论的出现为拉索的减振提供了新的思路。mr(magneto rheological,磁流变)阻尼器是一种基于新型流变材料的智能减振装置,它不仅具备被动控制装置的可靠性,还兼具主动控制装置的强适应性,在拉索减振领域具有巨大的发展潜力。
4.然而,mr 阻尼器复杂的非线性关系及其独特的滞回特性,导致使用该类作动器的控制装置难以找到配套使用的控制器,无法实现 mr 阻尼器的精确控制。
技术实现要素:
5.本发明提供了一种基于lstm逆向模型的半主动控制方法、装置、设备和存储介质,可用于mr阻尼器的lstm 逆模型半主动控制,实现对mr阻尼器的实时、精准控制,减轻斜拉索的振动。
6.本发明提供了一种基于lstm逆向模型的半主动控制方法,包括:获取t时刻斜拉桥拉索的响应;其中,所述响应为活塞杆的速度和位移;将所述活塞杆的速度和位移输入预设的算法进行计算,得到最优控制力f
ture
;将所述最优控制力f
ture
输入预设的基于lstm的mr阻尼器的逆向映射模型,得到mr阻尼器的输入电流;将所述输入电流和t时刻活塞杆的速度、位移发送至mr阻尼器,以输出阻尼力f
pre
;将所述阻尼力f
pre
作用在拉索-阻尼器连接处,并使t=t+1,返回所述获取t时刻斜拉桥拉索的响应的步骤。
7.进一步地,所述mr阻尼器产生与活塞杆运动方向相反的阻抗力,所述mr阻尼器在xoy平面内产生阻尼力的方向不变,为:,其中,为所述mr阻尼器在y方向产生的阻尼力,为所述mr阻尼器在x方向产生的阻尼力,为不考虑垂度时拉索与水平面的夹角。
8.进一步地,所述预设的算法,包括:确定结构系统在外部环境干扰以及主动控制力作用下的运动方程为:
,且,,其中,m、c、k分别为拉索的n维质量矩阵、阻尼矩阵、刚度矩阵为阻尼器的位置列阵,e为外加荷载的位置矩阵,、分别为阻尼器控制力向量和外部荷载向量;将所述运动方程转换为空间方程,得到:,,;确定结构系统的二次性能泛函为:,其中,为半正定矩阵,为正定矩阵;在无限的时间区间内得到最优控制量,即求解满足约束条件的值,使得系统性能泛函j取到极小值;其中,所述为最优控制力f
ture
。
9.进一步地,所述预设的基于lstm的mr阻尼器的逆向映射模型包括:输入层、输出层和多个隐藏层,每个隐藏层包括多个网络单元,每个网络单元包括输入门、遗忘门、输出门和单元状态,在单元状态更新过程中,所述输出层还连接一个单层全连接神经网络用于输出特征;所述全连接神经网络以relu函数作为激活函数,隐藏层的激活函数为tanh函数,所述逆向映射模型反向传播优化算法采用adam算法,所述逆向映射模型超参数采用pso(particle swarm optimization,粒子群优化算法)算法进行优化;mr阻尼器正常工作情况下,所述输入层用于输入活塞的位移、速度和控制力,输出层用于输出控制电流值,并采用均方根误差函数作为网络训练的损失函数。
10.本发明还提供了一种基于lstm逆向模型的半主动控制装置,包括:获取模块,用于获取t时刻斜拉桥拉索的响应;其中,所述响应为活塞杆的速度和位移;计算模块,用于将所述活塞杆的速度和位移输入预设的算法进行计算,得到最优控制力f
ture
;输入模块,用于将所述最优控制力f
ture
输入预设的基于lstm的mr阻尼器的逆向映射模型,得到mr阻尼器的输入电流;发送模块,用于将所述输入电流和t时刻活塞杆的速度、位移发送至mr阻尼器,以输出阻尼力f
pre
;返回模块,用于将所述阻尼力f
pre
作用在拉索-阻尼器连接处,并使t=t+1,返回所述获取t时刻斜拉桥拉索的响应的步骤。
11.本发明还提供了一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现上述方法的步骤。
12.本发明还提供了一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现上述方法的步骤。
13.本发明的有益效果为:本发明采用基于lstm 的mr 阻尼器逆向模型,完成半主动控制过程中从最优控制力到输入电流信号的逆向映射,使mr 阻尼器所产生的阻尼力尽可能的逼近最优控制力,从而实现拉索的全状态控制,减轻斜拉索的振动。半主动控制不存在对外部大功率能源的依
赖性,能耗很小稳定性极强,满足大多数结构在种工况下的减振需求。
附图说明
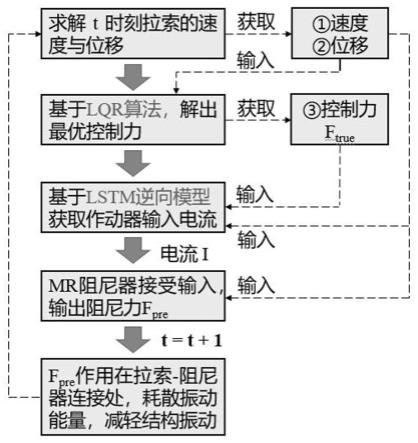
14.图1为本发明一实施例的方法流程示意图;图2为本发明中均布正弦荷载作用下拉索跨中点位移时程曲线图;图3为本发明中均布高斯白噪声随机荷载作用下拉索跨中点位移时程曲线图;图4为本发明中准运动水线风雨激振跨中点位移时程曲线图;图5为本发明中运动水线风雨激振拉索跨中点位移时程曲线图;图6为本发明一实施例的装置结构示意图;图7为本发明一实施例的计算机设备内部结构示意图。
15.本发明目的的实现、功能特点及优点将结合实施例,参照附图做进一步说明。
具体实施方式
16.应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
17.由于大跨斜拉桥的拉索在动力荷载作用下极易发生大幅的振动,而mr阻尼器的独特优势使其能够在拉索的振动控制中发挥很好的效果。但由于磁流变阻尼器的运动机理不够明确、控制策略不够完善,因此探寻更加高效的振动控制措施非常有必要。本发明提出一种作为控制器的半主动控制策略,用lstm(long short-term memory,长短期记忆)神经网络建立的mr阻尼器的逆向模型将作为控制系统的控制器,将lqr(linear quadratic regulator,线性二次型)最优控制算法算出的最优控制力转化为输入电流信号,实现拉索的振动控制。
18.mr减振装置的优势明显,但其高度非线性会给控制器的设计带来很大的不确定性。本发明使用基于lstm的mr阻尼器逆向模型,完成半主动控制过程中从最优控制力到输入电流信号的逆向映射任务,使mr阻尼器所产生的阻尼力尽可能的逼近最优控制力,从而实现拉索的全状态控制,如图1所示,本发明提供了一种基于lstm逆向模型的半主动控制方法,包括:s1、获取t时刻斜拉桥拉索的响应;其中,所述响应为活塞杆的速度和位移;s2、将所述活塞杆的速度和位移输入预设的算法进行计算,得到最优控制力f
ture
;所述预设的算法,包括:确定结构系统在外部环境干扰以及主动控制力作用下的运动方程为:,且,,其中,m、c、k分别为拉索的n维质量矩阵、阻尼矩阵、刚度矩阵,为阻尼器的位置列阵,e为外加荷载的位置矩阵,、分别为阻尼器控制力向量和外部荷载向量;将所述运动方程转换为空间方程,得到:,,;确定结构系统的二次性能泛函为:,其中,为半正定矩阵,为正定矩阵;
在无限的时间区间内得到最优控制量,即求解满足约束条件的值,使得系统性能泛函j取到极小值;其中,所述为最优控制力f
ture
。
19.当系统因外荷载等原因偏离平衡状态时,状态控制算法能够在尽可能少消耗能量的情况下,使系统的状态趋于零状态。即在无限的时间区间内得到最优控制量,让系统从非平衡状态尽快修正到零状态附近,并尽可能的保证不过度消耗能源。
20.求解满足约束条件的值,使得系统性能泛函j取到极小值;其中,所述为最优控制力f
ture
。
21.引入lagrange函数解决泛函的极小值求解问题:通过变分法求解上述状态控制方程的最优问题,将公式(1)变形为:通过变分法求解上述状态控制方程的最优问题,将公式(1)变形为:令、、分别为、、的变分形式,其引起的泛函增量记为、、,只考虑一阶微量,得到泛函关于各函数变量的偏导数公式为:,只考虑一阶微量,得到泛函关于各函数变量的偏导数公式为:,只考虑一阶微量,得到泛函关于各函数变量的偏导数公式为:,只考虑一阶微量,得到泛函关于各函数变量的偏导数公式为:,只考虑一阶微量,得到泛函关于各函数变量的偏导数公式为:是泛函l取极小值的必要条件,考虑到、、具有任意性,使,需满足:需满足:需满足:需满足:边界条件已知:,,,将公式(1)代入公式(8),得到系统状
态方程,即运动方程:。
22.将泛函变分公式(1)代入公式(7),得到:其中r为正定矩阵,最优控制输入表示为:根据公式(1)和公式(6),得到的关系式:公式(11)显示为关于的线性函数,为了能用状态反馈向量直接表示最优控制向量,假设与之间存在以下线性关系:其中,,将公式(13)代入公式(11)得到:简化为,式中g为最优状态反馈增益矩阵,将公式(13)以及状态方程代入公式(12),消去和并简化后,得到:当t
→
∞时,系统状态无线接近于零,由和公式(13)得到:,为riccati矩阵,根据q、r的对称性可知和解的为一定,和均满足公式(16)所示的边界条件,且均为公式(15)的解,因此,,为对称矩阵。
23.s3、将所述最优控制力f
ture
输入预设的基于lstm的mr阻尼器的逆向映射模型,得到mr阻尼器的输入电流;所述预设的基于lstm的mr阻尼器的逆向映射模型包括:输入层、输出层和多个隐藏层,每个隐藏层包括多个网络单元,每个网络单元包括输入门、遗忘门、输出门和单元状态,在单元状态更新过程中,所述输出层还连接一个单层全连接神经网络用于输出特征;在单元状态更新过程中,输入门:控制当前时刻的输入信息保存到当前时刻单元状态中的占比;遗忘门:控制上一时刻的单元状态保留到当前时刻单元状态中的占比;输出门:控制当前的单元状态有多少能够作为当前的输出值。
24.所述全连接神经网络以relu函数作为激活函数,隐藏层的激活函数为tanh函数,所述逆向映射模型反向传播优化算法采用adam算法,所述逆向映射模型超参数采用pso算法进行优化;mr阻尼器正常工作情况下,所述输入层用于输入活塞的位移、速度和控制力,输出层用于输出控制电流值,并采用均方根误差函数作为网络训练的损失函数。
25.从网络单一时间步的剖面上看,数据在lstm网络中的处理流程与在全连接神经网络中相似。不同的是,将lstm网络结构沿着时间轴展开,其t-1时刻隐藏层的信息h
t-1
、c
t-1
会
以记忆的形式传递到t时刻,使多个时间步上的信息能够共享,保证了时间序列信息的高效利用。
26.基于“mr阻尼器lstm逆向模型”的优势在于:1、神经网络本质上是一个强非线性拟合工具,理论上只要有足够的可用数据集,能以任意精度逼近目标系统,非常适合用于非线性系统的重构;2、除此之外,如mr阻尼器这类高度非线性系统的精确数学模型非常复杂,建立起来相当困难,并且解方程非常耗时,难以满足系统控制的时效性要求。而经过适当训练后的网络模型映射速度快,且具有较好的泛化性以及建模的便捷性,避免了方程建立的困难,能够满足控制系统的要求。
27.3、神经网络具有较好的泛化性,经过适当训练的神经网络在一定程度上可以推断出训练数据范围之外的数据关系;4、神经网络模型具有一定的鲁棒性,在噪声的过滤方面具有较好的表现。
28.s4、将所述输入电流和t时刻活塞杆的速度、位移发送至mr阻尼器,以输出阻尼力f
pre
;s5、将所述阻尼力f
pre
作用在拉索-阻尼器连接处,并使t=t+1,返回所述获取t时刻斜拉桥拉索的响应的步骤。
29.主动控制中的作动器可以产生任意控制力,因此主动控制可以理解为控制效果的上限;而mr阻尼器不同于主动控制中的作动器, 它并不能主动产生控制力,只能通过阻碍结构运动起到消耗振动能量的作用,即只能产生与活塞杆运动方向相反的阻抗力,半主动控制器的输出限制为:除此之外,由于mr阻尼器一般安装在靠近拉索下锚固点附近,活塞杆与拉索连接点的位移很小,对阻尼器空间位置的影响可以忽略不计。因此,在计算过程中,所述mr阻尼器在xoy平面内产生阻尼力的方向不变,为:,其中,为所述mr阻尼器在y方向产生的阻尼力,为所述mr阻尼器在x方向产生的阻尼力,为不考虑垂度时拉索与水平面的夹角。
30.以南京长江二桥a20号拉索为工程背景,建立斜拉索的动力学模型,并考虑拉索在四种荷载工况下的响应,包括:均布正弦荷载、均布高斯白噪声随机荷载、令水线作正弦运动的准运动水线风雨荷载、考虑水线和拉索之间相互作用力的运动水线风雨荷载,并通过python编程求解。
31.如图2所示,工况1:均布正弦荷载图2显示了拉索在不同控制策略下的位移时程曲线,其中,曲线图从横向中心向上分为1、2、3、4区域,从横向中心向下分为5、6、7、8区域,主动控制为1、5区域,即正中心区域,半主动控制为2、6区域,被动阻尼为3、7区域,无控为4、8区域。从计算结果可以看出,基于lstm网络模型的半主动控制在减振效果上优于被动阻尼器,控制率更接近主动控制,对均布正弦荷载所激励的拉索振动能起到有效的控制。
32.如图3所示,工况2:高斯白噪声随机荷载
从图3中的信息可以看出,lstm半主动控制减振性能优于被动控制,减振效率能够达到主动控制的84%,无论是能耗还是减振效率,都更加接近最优控制算法算出的控制策略(即主动控制)。
33.如图4所示,工况3:准运动水线假设下的拉索风雨激振图4为风速=10m/s,准运动水线风雨激振跨中点位移时程曲线图,其中,曲线图从横向中心向上分为1、2、3、4区域,从横向中心向下分为5、6、7、8区域,主动控制为1、5区域,即正中心区域,半主动控制为2、6区域,被动阻尼为3、7区域,无控为4、8区域,图4显示了lstm半主动控制与被动阻尼器控制策略、主动控制策略的减振效果对比,减振效果的对比几乎与高斯白噪声荷载下一致。虽然准运动水线风雨激振是通过假设水线的运动轨迹来获取拉索在风雨荷载下的响应,并不能完全反映拉索风雨激振的真实情况,但是这种危险工况的减振效果,同时也能检验出控制策略的有效性以及普适性。
34.如图5所示,工况4:运动水线拉索风雨激振,显示了运动水线风雨激振拉索跨中点位移时程曲线图。
35.从上述四个工况的计算结果可以看出,基于磁流变阻尼器的神经网络半主动控制策略的控制减振效果在多种工况下都优于被动阻尼控制策略,尤其是跨中点的速度方面。lstm半主动控制的控制效率与主动控制的效率非常接近,输出控制力能够逼近最优控制算法所算出的最优控制力,能量利用率高,具有高效性以及普适性,无论是以拉索的前四阶模态振动为主的风雨激振,还是能够引发更高阶模态的随机荷载振动,以lstm模型建立的mr阻尼器逆向模型为控制器的半主动控制系统都能起到很好的减振效果。
36.如图6所示,本发明还提供了一种基于lstm逆向模型的半主动控制装置,包括:获取模块1,用于获取t时刻斜拉桥拉索的响应;其中,所述响应为活塞杆的速度和位移;计算模块2,用于将所述活塞杆的速度和位移输入预设的算法进行计算,得到最优控制力f
ture
;输入模块3,用于将所述最优控制力f
ture
输入预设的基于lstm的mr阻尼器的逆向映射模型,得到mr阻尼器的输入电流;发送模块4,用于将所述输入电流和t时刻活塞杆的速度、位移发送至mr阻尼器,以输出阻尼力f
pre
;返回模块5,用于将所述阻尼力f
pre
作用在拉索-阻尼器连接处,并使t=t+1,返回所述获取t时刻斜拉桥拉索的响应的步骤。
37.在一个实施例中,所述mr阻尼器产生与活塞杆运动方向相反的阻抗力,所述mr阻尼器在xoy平面内产生阻尼力的方向不变,为:,其中,为所述mr阻尼器在y方向产生的阻尼力,为所述mr阻尼器在x方向产生的阻尼力,为不考虑垂度时拉索与水平面的夹角。
38.在一个实施例中,所述预设的算法,包括:确定结构系统在外部环境干扰以及主动控制力作用下的运动方程为:,且,,其中,m、c、k分别为拉索的n维质量矩阵、阻尼矩阵、刚度矩阵,为阻尼器的位置列阵,e为外加荷载的位置矩阵,
、分别为阻尼器控制力向量和外部荷载向量;将所述运动方程转换为空间方程,得到:,,;确定结构系统的二次性能泛函为:,其中,为半正定矩阵,为正定矩阵;在无限的时间区间内得到最优控制量,即求解满足约束条件的值,使得系统性能泛函j取到极小值;其中,所述为最优控制力f
ture
。
39.在一个实施例中,所述预设的基于lstm的mr阻尼器的逆向映射模型包括:输入层、输出层和多个隐藏层,每个隐藏层包括多个网络单元,每个网络单元包括输入门、遗忘门、输出门和单元状态,在单元状态更新过程中,所述输出层还连接一个单层全连接神经网络用于输出特征;所述全连接神经网络以relu函数作为激活函数,隐藏层的激活函数为tanh函数,所述逆向映射模型反向传播优化算法采用adam算法,所述逆向映射模型超参数采用pso算法进行优化;mr阻尼器正常工作情况下,所述输入层用于输入活塞的位移、速度和控制力,输出层用于输出控制电流值,并采用均方根误差函数作为网络训练的损失函数。
40.上述各模块均是用于对应执行上述基于lstm逆向模型的半主动控制方法中的各个步骤,其具体实现方式参照上述方法实施例所述,在此不再进行赘述。
41.如图7所示,本发明还提供了一种计算机设备,该计算机设备可以是服务器,其内部结构可以如图7所示。该计算机设备包括通过系统总线连接的处理器、存储器、网络接口和数据库。其中,该计算机设计的处理器用于提供计算和控制能力。该计算机设备的存储器包括非易失性存储介质、内存储器。该非易失性存储介质存储有操作系统、计算机程序和数据库。该内存器为非易失性存储介质中的操作系统和计算机程序的运行提供环境。该计算机设备的数据库用于存储基于lstm逆向模型的半主动控制方法的过程需要的所有数据。该计算机设备的网络接口用于与外部的终端通过网络连接通信。该计算机程序被处理器执行时以实现基于lstm逆向模型的半主动控制方法。
42.本领域技术人员可以理解,图7中示出的结构,仅仅是与本技术方案相关的部分结构的框图,并不构成对本技术方案所应用于其上的计算机设备的限定。
43.本技术一实施例还提供一种计算机可读存储介质,其上存储有计算机程序,计算机程序被处理器执行时实现上述任意一个基于lstm逆向模型的半主动控制方法。
44.本领域普通技术人员可以理解实现上述实施例方法中的全部或部分流程,是可以通过计算机程序来指令相关的硬件来完成,所述的计算机程序可存储与一非易失性计算机可读取存储介质中,该计算机程序在执行时,可包括如上述各方法的实施例的流程。其中,本技术所提供的和实施例中所使用的对存储器、存储、数据库或其它介质的任何引用,均可包括非易失性和/或易失性存储器。非易失性存储器可以包括只读存储器(rom)、可编程rom(prom)、电可编程rom(eprom)、电可擦除可编程rom(eeprom)或闪存。易失性存储器可包括随机存取存储器(ram)或者外部高速缓冲存储器。作为说明而非局限,ram通过多种形式可得,诸如静态ram(sram)、动态ram(dram)、同步dram(sdram)、双速据率sdram(ssrsdram)、增
强型sdram(esdram)、同步链路(synchlink)dram(sldram)、存储器总线(rambus)直接ram(rdram)、直接存储器总线动态ram(drdram)、以及存储器总线动态ram(rdram)等。
45.需要说明的是,在本文中,术语“包括”、“包含”或者其任何其它变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、装置、物品或者方法不仅包括那些要素,而且还包括没有明确列出的其它要素,或者是还包括为这种过程、装置、物品或者方法所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括该要素的过程、装置、物品或者方法中还存在另外的相同要素。
46.以上所述仅为本发明的优选实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本发明的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1