一种室内移动机器人自主乘梯方法及装置
1.本发明涉及机器人技术领域,具体涉及一种室内移动机器人自主乘梯方法及装置。
背景技术:
2.服务机器人作为智能机器人种类的一种,充分融合了计算机视觉、语音识别、自然语言处理、知识图谱等人工智能技术,目前已在基建、商业、民生、社会服务等领域得到广泛应用。例如服务型机器人,作为对标传统接待人员的机器人,功能一般包括迎宾接待、智能咨询、导览讲解、问路引领等;核心技术主要有视觉识别、语音交互、雷达感知、激光导航等。
3.室内移动的服务型、清洁型等机器人现已广泛应用于餐饮、商场、办公楼等场所,一台或多台机器人对某个楼层的服务能力可能导致不足或过剩;且对于多楼层场所而言,若机器人仅能应用于单个楼层,其服务范围有限,对于不同楼层的任务还需要人类自己完成,降低了机器人的实用性,为解决此问题研发出一种室内移动机器人自主乘梯方法及装置。
技术实现要素:
4.本发明的目的在于提供一种室内移动机器人自主乘梯方法及装置,以解决若机器人仅能应用于单个楼层,其服务范围有限,对于不同楼层的任务还需要人类自己完成,降低了机器人的实用性的问题。
5.为实现上述目的,本发明提供如下技术方案:
6.第一方面,一种室内移动机器人自主乘梯方法,包括;
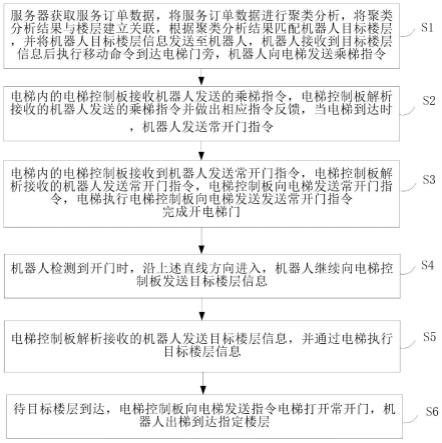
7.s1、服务器获取服务订单数据,将服务订单数据进行聚类分析,将聚类分析结果与楼层建立关联,根据聚类分析结果匹配机器人目标楼层,并将机器人目标楼层信息发送至机器人,机器人接收到目标楼层信息后执行移动命令到达电梯门旁,机器人向电梯发送乘梯指令;
8.s2、电梯内的电梯控制板接收机器人发送的乘梯指令,电梯控制板解析接收的机器人发送的乘梯指令并做出相应指令反馈,当电梯到达时,机器人发送常开门指令;
9.s3、电梯内的电梯控制板接收到机器人发送常开门指令,电梯控制板解析接收的机器人发送常开门指令,电梯控制板向电梯发送常开门指令,电梯执行电梯控制板向电梯发送常开门指令完成开电梯门;
10.s4、机器人检测到开门时,沿上述直线方向进入,机器人继续向电梯控制板发送目标楼层信息;
11.s5、电梯控制板解析接收的机器人发送目标楼层信息,并通过电梯执行目标楼层信息;
12.s6、待目标楼层到达,电梯控制板向电梯发送指令电梯打开常开门,机器人出梯到达指定楼层。
13.优选的,机器人检测到开门时,沿上述直线方向进入,机器人继续向电梯控制板发送目标楼层信息,包括;
14.当机器人发送常开门指令时,机器人通过视觉及单线激光雷达检测电梯开关门状态;
15.机器人视觉电梯门检测使用yolov5算法,在检测时返回预测结果及预测矩形框坐标信息(x1,y1),(x2,y2),通过获得矩形框中心坐标(x,y),过此点计算矩形框所在平面法向量,并通过坐标变换发布给机器人2d导航地图,机器人入梯时,机器人沿转换后直线进入。
16.第二方面,一种室内移动机器人自主乘梯装置,包括;
17.乘梯指令生成模块:服务器获取服务订单数据,将服务订单数据进行聚类分析,将聚类分析结果与楼层建立关联,根据聚类分析结果匹配机器人目标楼层,并将机器人目标楼层信息发送至机器人,机器人接收到目标楼层信息后执行移动命令到达电梯门旁,机器人向电梯发送乘梯指令;
18.开门指令生成模块:电梯内的电梯控制板接收机器人发送的乘梯指令,电梯控制板解析接收的机器人发送的乘梯指令并做出相应指令反馈,当电梯到达时,机器人发送常开门指令;
19.开门执行模块:电梯内的电梯控制板接收到机器人发送常开门指令,电梯控制板解析接收的机器人发送常开门指令,电梯控制板向电梯发送常开门指令,电梯执行电梯控制板向电梯发送常开门指令完成开电梯门;
20.目标楼层生成模块:机器人检测到开门时,沿上述直线方向进入,机器人继续向电梯控制板发送目标楼层信息;
21.目标楼层执行模块:电梯控制板解析接收的机器人发送目标楼层信息,并通过电梯执行目标楼层信息;
22.出梯命令生成模块:待目标楼层到达,电梯控制板向电梯发送指令电梯打开常开门,机器人出梯到达指定楼层。
23.优选的,目标楼层生成模块,包括;
24.数据采集单元,当机器人发送常开门指令时,机器人通过视觉及单线激光雷达检测电梯开关门状态;
25.数据分析单元,机器人视觉电梯门检测使用yolov5算法,在检测时返回预测结果及预测矩形框坐标信息(x1,y1),(x2,y2),通过获得矩形框中心坐标(x,y),过此点计算矩形框所在平面法向量,并通过坐标变换发布给机器人2d导航地图,机器人入梯时,机器人沿转换后直线进入。
26.与现有技术相比,本发明的有益效果是一种室内移动机器人自主乘梯方法及装置,通过机器人到达电梯门旁,发送乘梯指令,电梯控制板解析指令并做出相应,当电梯到达时,机器人发送常开门指令,检测到开门时,沿上述直线方向进入;继续发送目标楼层信息,待目标楼层到达,常开门出梯,使得机器人能够自己操控电梯,完成不同楼层之间的任务,使机器人的工作能力和应用范围充分发挥,做到真正的智能体,解决了若机器人仅能应
用于单个楼层,其服务范围有限,对于不同楼层的任务还需要人类自己完成,降低了机器人的实用性的问题。
附图说明
27.图1为本发明室内移动机器人自主乘梯理流程示意图。
28.图2为本发明室内移动机器人自主乘梯方法示意图。
29.图3为本发明室内移动机器人自主乘梯开门检测示意图。
具体实施方式
30.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
31.第一方面,一种室内移动机器人自主乘梯方法,包括;
32.s1、服务器获取服务订单数据,将服务订单数据进行聚类分析,将聚类分析结果与楼层建立关联,根据聚类分析结果匹配机器人目标楼层,并将机器人目标楼层信息发送至机器人,机器人接收到目标楼层信息后执行移动命令到达电梯门旁,机器人向电梯发送乘梯指令;
33.s2、电梯内的电梯控制板接收机器人发送的乘梯指令,电梯控制板解析接收的机器人发送的乘梯指令并做出相应指令反馈,当电梯到达时,机器人发送常开门指令;
34.s3、电梯内的电梯控制板接收到机器人发送常开门指令,电梯控制板解析接收的机器人发送常开门指令,电梯控制板向电梯发送常开门指令,电梯执行电梯控制板向电梯发送常开门指令完成开电梯门;
35.s4、机器人检测到开门时,沿上述直线方向进入,机器人继续向电梯控制板发送目标楼层信息;
36.s5、电梯控制板解析接收的机器人发送目标楼层信息,并通过电梯执行目标楼层信息;
37.s6、待目标楼层到达,电梯控制板向电梯发送指令电梯打开常开门,机器人出梯到达指定楼层。
38.具体而言,机器人检测到开门时,沿上述直线方向进入,机器人继续向电梯控制板发送目标楼层信息,包括;
39.当机器人发送常开门指令时,机器人通过视觉及单线激光雷达检测电梯开关门状态;
40.机器人视觉电梯门检测使用yolov5算法,在检测时返回预测结果及预测矩形框坐标信息(x1,y1),(x2,y2),通过获得矩形框中心坐标(x,y),过此点计算矩形框所在平面法向量,并通过坐标变换发布给机器人2d导航地图,机器人入梯时,机器人沿转换后直线进入。
41.第二方面,一种室内移动机器人自主乘梯装置,包括;
42.乘梯指令生成模块:服务器获取服务订单数据,将服务订单数据进行聚类分析,将聚类分析结果与楼层建立关联,根据聚类分析结果匹配机器人目标楼层,并将机器人目标楼层信息发送至机器人,机器人接收到目标楼层信息后执行移动命令到达电梯门旁,机器人向电梯发送乘梯指令;
43.开门指令生成模块:电梯内的电梯控制板接收机器人发送的乘梯指令,电梯控制板解析接收的机器人发送的乘梯指令并做出相应指令反馈,当电梯到达时,机器人发送常开门指令;
44.开门执行模块:电梯内的电梯控制板接收到机器人发送常开门指令,电梯控制板解析接收的机器人发送常开门指令,电梯控制板向电梯发送常开门指令,电梯执行电梯控制板向电梯发送常开门指令完成开电梯门;
45.目标楼层生成模块:机器人检测到开门时,沿上述直线方向进入,机器人继续向电梯控制板发送目标楼层信息;
46.目标楼层执行模块:电梯控制板解析接收的机器人发送目标楼层信息,并通过电梯执行目标楼层信息;
47.出梯命令生成模块:待目标楼层到达,电梯控制板向电梯发送指令电梯打开常开门,机器人出梯到达指定楼层。
48.具体而言,目标楼层生成模块,包括;
49.数据采集单元,当机器人发送常开门指令时,机器人通过视觉及单线激光雷达检测电梯开关门状态;
50.数据分析单元,机器人视觉电梯门检测使用yolov5算法,在检测时返回预测结果及预测矩形框坐标信息(x1,y1),(x2,y2),通过获得矩形框中心坐标(x,y),过此点计算矩形框所在平面法向量,并通过坐标变换发布给机器人2d导航地图,机器人入梯时,机器人沿转换后直线进入。
51.本技术的数据传输通过无线数据传输方式进行传输,传输方式包括4g、5g信号传输方式以及无线网络传输;
52.本技术通过后台控制系统对机器人进行相关参数设定以及程序的配置,将机器人产生的数据同步传输至服务器进行存储以及数据分析,然后通过后台控制端将执行数据进行显示。
53.根据需要,设计符合功能的电梯控制板,接入电梯轿厢控制系统并获得相关数据;机器人通过无线通信模块收发指令,完成电梯控制;
54.为增大进出电梯安全性,当机器人发送常开门指令时,会通过视觉及单线激光雷达检测电梯开关门状态,可极大减小视觉受光线影响及雷达平面扫描信息相对缺失问题的影响;
55.视觉电梯门检测使用yolov5算法,在检测时返回预测结果及预测矩形框坐标信息(x1,y1),(x2,y2),通过获得矩形框中心坐标(x,y),过此点计算矩形框所在平面法向量,并通过坐标变换发布给机器人2d导航地图,入梯时,沿转换后直线进入;
56.具体乘梯流程为:机器人到达电梯门旁,发送乘梯指令,电梯控制板解析指令并做出相应,当电梯到达时,机器人发送常开门指令,检测到开门时,沿上述直线方向进入;继续发送目标楼层信息,待目标楼层到达,常开门出梯;
57.请参阅图3开门检测示意图,视觉电梯门检测时返回预测结果及预测矩形框坐标信息(x1,y1),(x2,y2),通过获得矩形框中心坐标(x,y),过此点计算矩形框所在平面法向量,并通过坐标变换发布给机器人2d导航地图,入梯时,沿转换后直线进入;
58.请参阅图1室内移动机器人自主乘梯理流程示意图,具体乘梯流程为:机器人到达电梯门旁,发送乘梯指令,电梯控制板解析指令并做出相应,当电梯到达时,机器人发送常开门指令,检测到开门时,沿上述直线方向进入;继续发送目标楼层信息,待目标楼层到达,常开门出梯;
59.本发明技术方案使用原理,一种室内移动机器人自主乘梯方法及装置,通过机器人到达电梯门旁,发送乘梯指令,电梯控制板解析指令并做出相应,当电梯到达时,机器人发送常开门指令,检测到开门时,沿上述直线方向进入;继续发送目标楼层信息,待目标楼层到达,常开门出梯,使得机器人能够自己操控电梯,完成不同楼层之间的任务,使机器人的工作能力和应用范围充分发挥,做到真正的智能体,解决了若机器人仅能应用于单个楼层,其服务范围有限,对于不同楼层的任务还需要人类自己完成,降低了机器人的实用性的问题。
60.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1