一种船舶轨迹跟踪系统控制器及其控制方法
1.本发明涉及网络化控制技术领域,尤其涉及一种船舶轨迹跟踪系统控制器及其控制方法。
背景技术:
2.近年来,国际海洋运输行业快速发展,国际贸易总运量中的2/3以上,中国进出口货运总量的约90%都是利用海上运输。海洋运输行业对我国与世界各国的贸易往来,发挥巨大的作用。
3.船舶交通管理系统,是指港口对特定水域内船舶交通进行管理的系统,为确保在港口或航道内船只交通安全、提高船只交通效率而提供的特定服务,特别是下列的特殊水域:船舶密集区域、运输危险货物船舶通航航道、航行危险区域、狭窄航道。为了保障船舶航行安全,一些船舶交通管理系统配备了高精度定位系统,利用无线通信网络把岸测高精度船位信息发送给船上,实时检测船舶偏离航道误差,调整航行路线。一些船舶交通管理系统还在码头上安装船舶靠岸的雷达设备,以便于控制船舶。
4.随着智能航运管理系统的应用与发展,船舶轨迹跟踪系统成为船舶交通管理系统的重要组成部分。船舶轨迹跟踪系统就是在规定的时间内控制船舶到达原本设定的位置上。智能航运管理系统的实现,需要船舶轨迹跟踪系统控制器具有高性能的轨迹跟踪能力。
5.目前,船舶轨迹跟踪系统控制器设计,存在较大的技术难题需要解决,面临着巨大的挑战。主要技术难题包括:船舶模型高度非线性和强耦合性、船舶轨迹跟踪系统参数存在不确定性、海面受外界风浪流等环境干扰等。
6.另外,船舶信息需要通过无线通信网络实现与陆上联系,而无线通信网络也存在通信受限:数据包丢失、传输时间延迟和乱序、传输速率受限等。为了确保无线通信网络的可靠性,可以采用ip/tcp网络协议,对丢失的数据包重新传输。但是,数据包重新传输会造成时间延迟和乱序等问题。这将对船舶轨迹跟踪系统造成巨大的影响,降低控制性能指标,严重的话会造成系统不稳定,从而造成对船舶失去控制,无法确保船舶的安全航行。
7.目前,如何设计船舶轨迹跟踪系统控制器,采用有效的控制方法,降低无线通信网络数据包传输时间延迟和乱序等问题对船舶轨迹跟踪与控制造成的影响,确保船舶的安全航行,是有待解决的关键性技术难题。
技术实现要素:
8.本发明要解决的技术问题是针对上述现有技术的不足,提供一种船舶轨迹跟踪系统控制器及其控制方法,实现对船舶轨迹跟踪系统的有效控制,确保船舶的安全航行,并在保证满足系统控制性能指标的条件下,有效降低数据包传输时间延迟和乱序等问题对船舶轨迹跟踪系统造成的影响。
9.为解决上述技术问题,本发明所采取的技术方案是:
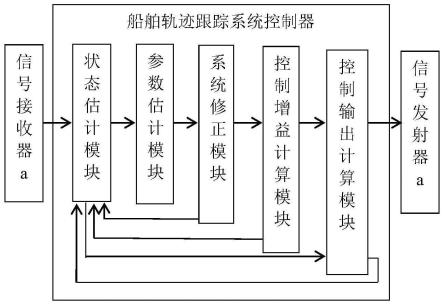
10.一方面,本发明提供一种船舶轨迹跟踪系统控制器,包括依次连接的状态估计模
块、参数估计模块、系统修正模块、控制增益计算模块和控制输出计算模块;
11.状态估计模块与信号接收器a连接,用于接收信号接收器a发送的船舶轨迹跟踪系统状态信息,基于该信息计算船舶轨迹跟踪系统状态估计值;
12.参数估计模块基于船舶轨迹跟踪系统状态估计值,对系统不确定参数进行估计,得到系统参数估计值;
13.系统修正模块基于系统参数估计值,对系统进行修正,得到更新的系统状态和系统状态方程;
14.控制增益计算模块基于更新的系统状态和系统状态方程,在满足控制性能指标要求的条件下,计算控制增益;
15.控制输出计算模块基于计算得到的控制增益和系统状态估计值,计算控制输出,并通过无线通信网络发送给执行器,实现对船舶的有效控制。
16.进一步地,状态估计模块包括:子状态排序模块、子状态预算模块、子状态估计模块、系统状态计算模块和系统状态输出模块;
17.子状态排序模块用于对从信号接收器接收到的船舶轨迹跟踪系统子状态进行存储,并按照先后顺序进行排序;
18.在k时刻第i个船舶轨迹跟踪系统子状态为k时刻第i个船舶的位置信息g
ik
,g
ik
=[x
ik y
ik z
ik
]
t
,其中,x
ik
表示第i个船舶在k时刻的经度值,单位为度;y
ik
表示第i个船舶在k时刻的维度值,单位为度;z
ik
表示第i个船舶在k时刻的海拔高度值,单位为米;
[0019]
状态估计模块从信号接收器a得到某特定区域内n个船舶的位置信息为gk=[g
1k g
2k
ꢀ…ꢀgnk
]
t
;
[0020]
子状态预算模块用于计算得到各个船舶轨迹跟踪系统子状态预测值
[0021]
状态估计模块基于船舶轨迹跟踪系统状态方程和船舶轨迹跟踪系统控制输出,对k时刻n个船舶的位置信息gk进行预测计算,得到k时刻n个船舶的位置信息预测值计算方法如下所示:
[0022][0023]
基于计算得到的从而得到各个船舶轨迹跟踪系统子状态预测值提供给子状态估计模块使用;
[0024]
所述船舶轨迹跟踪系统状态方程从系统修正模块获得,船舶轨迹跟踪系统控制输出从控制输出计算模块获得,所述船舶轨迹跟踪系统状态方程如下所示:
[0025]gk
=a
k-1gk-1
+bu
k-1
+fw
k-1
[0026]
其中,u
k-1
表示在k-1时刻控制输出计算模块产生的船舶轨迹跟踪系统控制输出;w
k-1
表示在k-1时刻船舶轨迹跟踪系统的噪声和干扰;a
k-1
、b、f是适当维数的矩阵;
[0027]
子状态估计模块用于计算第i个船舶轨迹跟踪系统子状态估计值通过如下公式计算:
[0028][0029]
其中,ρ=1表示数据包传输发生时间延迟和乱序;ρ=0表示数据包传输没有发生
时间延迟和乱序;
[0030]
系统状态计算模块用于根据计算得到的船舶轨迹跟踪系统子状态估计值进一步计算得到船舶迹跟踪系统状态估计值如下式所示:
[0031][0032]
系统状态输出模块用于将计算得到的船舶轨迹跟踪系统状态估计值输出给参数估计模块。
[0033]
进一步地,参数估计模块基于得到的船舶轨迹跟踪系统状态估计值对系统矩阵ak进行估计;令v
1k
、v
2k
、...、v
mk
表示m个随时间变化较缓慢的不确定参数,表示m个随时间变化较缓慢的不确定参数,表示m个不确定参数相应的估计值,m≤n;系统矩阵ak表示为:
[0034][0035]
其中,s1、s2、...、sm是与相应的矩阵;a是当v
1k
、v
2k
、...、v
mk
都为零时的系统矩阵;
[0036]
系统矩阵ak还能通过下式计算:
[0037][0038]
结合上述两个系统矩阵ak的公式,则得到如下方程:
[0039][0040]
通过求解上面的方程,计算得到发送给系统修正模块。
[0041]
进一步地,系统修正模块从参数估计模块获得后,根据下面公式计算系统矩阵ak:
[0042][0043]
然后,根据下面公式计算船舶轨迹跟踪系统状态方程:
[0044][0045]
其中,表示船舶轨迹跟踪系统中的噪声干扰估计值;
[0046]
系统修正模块将计算船舶轨迹跟踪系统状态方程和系统状态估计值发送给控制增益计算模块。
[0047]
进一步地,控制增益计算模块收到系统修正模块发送的船舶轨迹跟踪系统状态方程和系统状态估计值后,更新系统状态,同时更新系统状态方程,并基于船舶轨迹跟踪系统状态方程计算控制增益lk;
[0048]
船舶轨迹跟踪系统采用状态反馈控制,控制输出uk为:
[0049][0050]
首先,进行控制性能指标设定,令jk表示在k时刻船舶轨迹跟踪系统控制性能指标,用下面公式计算:
[0051][0052]
其中,q和p是对称正定矩阵,e(x)表示对变量x求均值;
[0053]
在船舶轨迹跟踪系统控制过程中,需要尽可能使得控制性能指标jk最小,并小于给定的上界;因此,需要计算求解下面的最小化问题:
[0054][0055]
其中,mu是系统控制性能指标jk必须要满足的上界;
[0056]
通过求解上面的最小化问题,计算得到控制增益lk,如下式所示:
[0057]
lk=-(b
t
hb+p)-1bt
hak[0058]
其中,h是一个矩阵,满足下面的方程:
[0059][0060]
控制增益计算模块将计算得到的控制增益lk以及系统状态估计值传送给控制输出计算模块。
[0061]
控制输出计算模块收到控制增益lk以及系统状态估计值后,计算控制输出值uk:
[0062][0063]
控制输出uk经过信号发射器a,发送给信号接收器1~n,再传输给执行器1~n;最后经过执行器1~n实现对船舶1~n的控制,确保船舶航行安全。
[0064]
另一方面,本发明还提供一种船舶轨迹跟踪系统控制方法,采用上述的船舶轨迹跟踪系统控制器实现,包括以下步骤:
[0065]
步骤1:基于接收到的船舶轨迹跟踪系统状态信息,得到船舶轨迹跟踪系统状态估计值;
[0066]
步骤2:基于船舶轨迹跟踪系统状态估计值,对系统不确定参数进行估计,得到系统参数估计值;
[0067]
步骤3:基于系统参数估计值,对系统进行修正,得到更新的系统状态和系统状态方程;
[0068]
步骤4:基于更新的系统状态和系统状态方程,在满足控制性能指标要求的条件下,计算控制增益;
[0069]
步骤5:基于计算得到的控制增益和系统状态估计值,计算控制输出,并通过无线通信网络发送给执行器,实现对船舶的有效控制。
[0070]
进一步地,步骤1的具体方法为:
[0071]
步骤1.1:状态估计模块从信号接收器a获得n个船舶的位置信息gk=[g
1k g
2k
ꢀ…ꢀgnk
]
t
,其中g
ik
=[x
ik y
ik z
ik
]
t
表示在k时刻接收到的第i个船舶的位置信息,也被称为在第k时刻第i个船舶轨迹跟踪系统子状态;其中,x
ik
表示第i个船舶在k时刻的经度值,单位为度;y
ik
表示第i个船舶在k时刻的维度值,单位为度;z
ik
表示第i个船舶在k时刻的海拔高度值,单位为米;
[0072]
对接收到的船舶轨迹跟踪系统子状态进行存储,并按照先后顺序进行排序;
[0073]
步骤1.2:基于船舶轨迹跟踪系统状态方程和船舶轨迹跟踪系统控制输出,对k时刻n个船舶的位置信息gk进行预测计算,得到在第k时刻n个船舶的位置信息预测值计算方法如下所示:
[0074][0075]
基于计算得到的从而得到各个船舶轨迹跟踪系统子状态预测值
[0076]
其中船舶轨迹跟踪系统状态方程,如下所示:
[0077]gk
=a
k-1gk-1
+bu
k-1
+fw
k-1
[0078]
其中,u
k-1
表示在k-1时刻的船舶轨迹跟踪系统控制输出;w
k-1
表示在k-1时刻的船舶轨迹跟踪系统的噪声和干扰;a
k-1
、b、f是适当维数的矩阵;
[0079]
步骤1.3:通过下式计算第i个船舶轨迹跟踪系统子状态估计值
[0080][0081]
其中,ρ=1表示数据包传输发生时间延迟和乱序;ρ=0表示数据包传输没有发生时间延迟和乱序;
[0082]
步骤1.4:根据计算得到的船舶轨迹跟踪系统子状态估计值进一步计算得到船舶轨迹跟踪系统状态估计值如下式所示:
[0083][0084]
进一步地,步骤2的具体方法如下:
[0085]
参数估计模块基于得到的系统状态估计值对系统矩阵ak进行估计;令v
1k
、v
2k
、...、v
mk
表示m个随时间变化较缓慢的不确定参数,表示m个不确定参数相应的估计值,m≤n;系统矩阵ak表示为:
[0086][0087]
其中,s1、s2、...、sm是与相应的矩阵;a是当v
1k
、v
2k
、...、v
mk
都为零时的系统矩阵;
[0088]
系统矩阵ak还能通过下式计算:
[0089][0090]
结合上述两个系统矩阵ak的公式,则得到如下方程:
[0091][0092]
通过求解上面的方程,计算得到发送给系统修正模块。
[0093]
进一步地,步骤3的具体方法为:
[0094]
系统修正模块从参数估计模块获得后,根据下式计算系统矩阵ak:
[0095][0096]
然后,根据下式计算船舶轨迹跟踪系统状态方程:
[0097][0098]
其中,表示船舶轨迹跟踪系统中的噪声干扰估计值。
[0099]
进一步地,步骤4的具体方法为:
[0100]
步骤4.1:控制增益计算模块根据系统修正模块发送的船舶轨迹跟踪系统状态方程和系统状态估计值,更新系统状态,同时更新系统状态方程;
[0101]
步骤4.2:进行船舶轨迹跟踪系统控制性能指标设定,令jk表示在k时刻船舶轨迹跟踪系统控制性能指标,用下面公式计算:
[0102][0103]
其中,q和p是对称正定矩阵,e(x)表示对变量x求均值;
[0104]
步骤4.3:在船舶轨迹跟踪系统控制过程中,需要尽可能使得控制性能指标jk最小,并小于给定的上界;因此,需要计算求解下面的最小化问题:
[0105][0106]
其中,mu是系统控制性能指标jk必须要满足的上界;
[0107]
步骤4.4:通过求解步骤4.3的最小化问题,计算得到控制增益lk,如下式所示:
[0108]
lk=-(b
t
hb+p)-1bt
hak[0109]
其中,h是一个矩阵,满足下面的方程:
[0110][0111]
所述步骤5中,控制输出计算模块根据控制增益lk以及系统状态估计值计算控制输出值uk:
[0112][0113]
控制输出uk经过信号发射器a,发送给信号接收器1~n,再传输给执行器1~n;最后经过执行器1~n实现对船舶1~n的控制,确保船舶航行安全。
[0114]
采用上述技术方案所产生的有益效果在于:本发明提供的船舶轨迹跟踪系统控制器及其控制方法,主要适用于特定区域内船舶轨迹跟踪系统,特别适合于实现对船舶轨迹跟踪系统的有效控制,确保特定区域内所有船舶的安全航行,并在保证满足系统控制性能指标的条件下,降低数据包传输时间延迟和乱序等问题对船舶轨迹跟踪系统造成的影响。
附图说明
[0115]
图1为本发明实施例提供的船舶轨迹跟踪系统结构示意图;
[0116]
图2为本发明实施例提供的船舶轨迹跟踪系统控制器结构框图;
[0117]
图3为本发明实施例提供的状态估计模块原理图;
[0118]
图4为本发明实施例提供的控制增益计算模块原理图。
具体实施方式
[0119]
下面结合附图和实施例,对本发明的具体实施方式作进一步详细描述。以下实施例用于说明本发明,但不用来限制本发明的范围。
[0120]
船舶轨迹跟踪系统,如图1所示,包括船舶1~n、定位器1~n、信号发射器1~n、信号接收器a、船舶轨迹跟踪系统控制器、信号发射器a、信号接收器1~n、执行器1~n。
[0121]
本实施例提供一种船舶轨迹跟踪系统控制器及其控制方法,主要适用于船舶轨迹跟踪系统,特别适合于实现对特定区域内所有船舶进行有效地控制,确保系统的稳定性,并在保证满足系统控制性能指标条件下,降低数据包传输时间延迟和乱序等问题对系统造成的影响,确保特定区域内所有船舶安全航行。
[0122]
本实施例的船舶轨迹跟踪系统控制器,如图2所示,包括依次连接的状态估计模块、参数估计模块、系统修正模块、控制增益计算模块和控制输出计算模块。
[0123]
假设特定区域内,有n个船舶,第i个船舶上面安装的定位器i可以获得该船舶的位置信息g
ik
=[x
ik y
ik z
ik
]
t
,其中,x
ik
表示第i个船舶在k时刻的经度值,单位为度;y
ik
表示第i个船舶在k时刻的维度值,单位为度;z
ik
表示第i个船舶在k时刻的海拔高度值,单位为米。第i个船舶在k时刻的位置信息g
ik
经过信号发射器i发射给信号接收器a;信号接收器a再将其发送船舶轨迹跟踪系统控制器;船舶轨迹跟踪系统控制器基于特定区域内所有n个船舶的位置信息gk=[g
1k g
2k
ꢀ…ꢀgnk
]
t
,计算得到控制输出;控制输出经过信号发射器a发送给信号接收器1~n,再传输给执行器1~n;最后经过执行器1~n实现对船舶1~n的控制。
[0124]
状态估计模块如图3所示,与信号接收器a连接,从信号接收器a得到n个船舶的位置信息gk=[g
1k g
2k ... g
nk
]
t
。状态估计模块包括:子状态排序模块、子状态预算模块、子状态估计模块、系统状态计算模块、系统状态输出模块。
[0125]
状态估计模块接收到的第i个船舶的位置信息g
ik
,也被称为在k时刻第i个船舶轨迹跟踪系统子状态。由于受到区域内的噪声和干扰的影响,g
ik
可能发生传输错误,必须进行重新发送,这将造成数据包传输时间延迟和乱序。因此,子状态排序模块首先需要对接收到的船舶轨迹跟踪系统子状态进行存储,并按照先后顺序进行排序。
[0126]
状态估计模块可以从系统修正模块获得船舶轨迹跟踪系统状态方程,如下所示:
[0127]gk
=a
k-1gk-1
+bu
k-1
+fw
k-1
[0128]
其中,u
k-1
表示控制输出计算模块产生的k-1时刻的船舶轨迹跟踪系统控制输出,并可以发送给状态估计模块;w
k-1
表示k-1时刻的船舶轨迹跟踪系统的噪声和干扰;a
k-1
、b、f是适当维数的矩阵。
[0129]
子状态预算模块基于船舶轨迹跟踪系统状态方程和船舶轨迹跟踪系统控制输出,对k时刻n个船舶的位置信息gk进行预测计算,得到k时刻n个船舶的位置信息预测值计算方法如下所示:
[0130][0131]
基于计算得到的从而得到各个船舶轨迹跟踪系统子状态预测值提供给子状态估计模块使用。
[0132]
由于受到无线通信网络的数据包传输时间延迟和乱序的影响,状态估计模块在第k时刻不一定能收到第i个船舶轨迹跟踪系统子状态g
ik
。令ρ=1表示数据包传输发生时间延迟和乱序;ρ=0表示数据包传输没有发生时间延迟和乱序。因此,子状态估计模块需要计算
第i个船舶轨迹跟踪系统子状态估计值通过如下公式计算:
[0133][0134]
系统状态计算模块根据计算得到的船舶轨迹跟踪系统子状态估计值进一步计算得到船舶轨迹跟踪系统状态估计值通过如下公式计算:
[0135][0136]
系统状态输出模块将计算得到的系统状态估计值输出给参数估计模块。
[0137]
参数估计模块基于得到的系统状态估计值对系统矩阵ak进行估计。考虑到船舶模型高度非线性和强耦合性、船舶轨迹跟踪系统参数存在不确定性、海面受外界风浪流等环境干扰等因素,系统矩阵ak存在不确定性。令v
1k
、v
2k
、...、v
mk
表示m个随时间变化较缓慢的不确定参数,表示m个不确定参数相应的估计值,m≤n。系统矩阵ak表示为:
[0138][0139]
其中,s1、s2、...、sm是与表示m个不确定参数相应的矩阵;a是当v
1k
、v
2k
、...、v
mk
都为零时的系统矩阵。
[0140]
还能通过下面计算系统矩阵ak:
[0141][0142]
结合上述两个系统矩阵ak的公式,则得到如下方程:
[0143][0144]
通过求解上面的方程,计算得到发送给系统修正模块。
[0145]
系统修正模块从参数估计模块获得后,根据下面公式计算系统矩阵ak:
[0146][0147]
然后,根据下面公式计算船舶轨迹跟踪系统状态方程:
[0148][0149]
其中,表示船舶轨迹跟踪系统中的噪声干扰估计值。
[0150]
系统修正模块将计算船舶轨迹跟踪系统状态方程和系统状态估计值发送给控制增益计算模块。
[0151]
控制增益计算模块收到系统修正模块发送的船舶轨迹跟踪系统状态方程和系统状态估计值后,更新系统状态,同时更新系统状态方程,并基于船舶轨迹跟踪系统状态方程计算控制增益lk,如图4所示。
[0152]
船舶轨迹跟踪系统采用状态反馈控制,控制输出uk为:
[0153]
[0154]
首先,进行控制性能指标设定。令jk表示在第k时刻船舶轨迹跟踪系统控制性能指标,用下面公式计算:
[0155][0156]
其中,q和p是对称正定矩阵,e(x)表示对变量x求均值。
[0157]
在船舶轨迹跟踪系统控制过程中,需要尽可能使得控制性能指标jk最小,并小于给定的上界;因此,需要计算求解下面的最小化问题:
[0158][0159]
其中,mu是系统控制性能指标jk必须要满足的上界。通过求解上面的最小化问题,计算得到控制增益lk,如下面公式所示:
[0160]
lk=-(b
t
hb+p)-1bt
hak[0161]
其中,h是一个矩阵,满足下面的方程:
[0162][0163]
控制增益计算模块将计算得到的控制增益lk以及系统状态估计值传送给控制输出计算模块。
[0164]
控制输出计算模块收到控制增益lk以及系统状态估计值后,按下式计算控制输出值uk:
[0165][0166]
控制输出uk经过信号发射器a,发送给信号接收器1~n,再传输给执行器1~n;最后经过执行器1~n实现对船舶1~n的控制,确保船舶航行安全。
[0167]
一种船舶轨迹跟踪系统控制方法,采用上述的船舶轨迹跟踪系统控制器实现,包括以下步骤:
[0168]
步骤1:基于接收到的船舶轨迹跟踪系统状态信息,得到船舶轨迹跟踪系统状态估计值。具体方法为:
[0169]
步骤1.1:状态估计模块从信号接收器a获得n个船舶的位置信息gk=[g
1k g
2k ... g
nk
]
t
,其中g
ik
=[x
ik y
ik z
ik
]
t
表示在k时刻接收到的第i个船舶的位置信息,也被称为在第k时刻第i个船舶轨迹跟踪系统子状态;其中,x
ik
表示第i个船舶在k时刻的经度值,单位为度;y
ik
表示第i个船舶在k时刻的维度值,单位为度;z
ik
表示第i个船舶在k时刻的海拔高度值,单位为米;
[0170]
对接收到的船舶轨迹跟踪系统子状态进行存储,并按照先后顺序进行排序;
[0171]
步骤1.2:从系统修正模块获得船舶轨迹跟踪系统状态方程,如下所示:
[0172]gk
=a
k-1gk-1
+bu
k-1
+fw
k-1
[0173]
其中,u
k-1
表示控制输出计算模块产生的k-1时刻的船舶轨迹跟踪系统控制输出,并可以发送给状态估计模块;w
k-1
表示k-1时刻的船舶轨迹跟踪系统的噪声和干扰;a
k-1
、b、f是适当维数的矩阵。
[0174]
基于船舶轨迹跟踪系统状态方程和船舶轨迹跟踪系统控制输出,对在第k时刻n个
船舶的位置信息gk进行预测计算,得到在第k时刻n个船舶的位置信息预测值计算方法如下所示:
[0175][0176]
基于计算得到的从而得到各个船舶轨迹跟踪系统子状态预测值
[0177]
步骤1.3:由于受到无线通信网络的数据包传输时间延迟和乱序的影响,状态估计模块在第k时刻不一定能收到第i个船舶轨迹跟踪系统子状态g
ik
;令ρ=1表示数据包传输发生时间延迟和乱序;ρ=0表示数据包传输没有发生时间延迟和乱序;因此,状态估计模块需要计算第i个船舶轨迹跟踪系统子状态估计值通过如下公式计算:
[0178][0179]
步骤1.4:状态估计模块根据计算得到的船舶轨迹跟踪系统子状态估计值进一步计算得到船舶轨迹跟踪系统状态估计值通过如下公式计算:
[0180][0181]
状态估计模块将计算得到的系统状态估计值输出给参数估计模块。
[0182]
步骤2:基于船舶轨迹跟踪系统状态估计值,对系统不确定参数进行估计,得到系统参数估计值。具体方法如下:
[0183]
参数估计模块基于得到的系统状态估计值对系统矩阵ak进行估计。
[0184]
考虑到船舶模型高度非线性和强耦合性、船舶轨迹跟踪系统参数存在不确定性、海面受外界风浪流等环境干扰等因素,系统矩阵ak存在不确定性。
[0185]
令v
1k
、v
2k
、...、v
mk
表示m个随时间变化较缓慢的不确定参数,表示m个不确定参数相应的估计值,m≤n;系统矩阵ak表示为:
[0186][0187]
其中,s1、s2、...、sm是与表示m个不确定参数相应的矩阵;a是当v
1k
、v
2k
、...、v
mk
都为零时的系统矩阵;
[0188]
还能通过下面计算系统矩阵ak:
[0189][0190]
结合上述两个系统矩阵ak的公式,则得到如下方程:
[0191][0192]
通过求解上面的方程,计算得到发送给系统修正模块。
[0193]
步骤3:基于系统参数估计值,对系统进行修正,得到更新的系统状态和系统状态方程。具体方法为:
[0194]
系统修正模块从参数估计模块获得后,根据下式计算系统矩阵ak:
[0195][0196]
然后,根据下式计算船舶轨迹跟踪系统状态方程:
[0197][0198]
其中,表示船舶轨迹跟踪系统中的噪声干扰估计值。
[0199]
系统修正模块将计算船舶轨迹跟踪系统状态方程和系统状态估计值发送给控制增益计算模块。
[0200]
步骤4:基于更新的系统状态和系统状态方程,在满足控制性能指标要求的条件下,计算控制增益;具体方法为:
[0201]
步骤4.1:控制增益计算模块根据系统修正模块发送的船舶轨迹跟踪系统状态方程和系统状态估计值,更新系统状态,同时更新系统状态方程;
[0202]
步骤4.2:进行船舶轨迹跟踪系统控制性能指标设定,令jk表示在k时刻船舶轨迹跟踪系统控制性能指标,用下面公式计算:
[0203][0204]
其中,q和p是对称正定矩阵,e(x)表示对变量x求均值;
[0205]
步骤4.3:在船舶轨迹跟踪系统控制过程中,需要尽可能使得控制性能指标jk最小,并小于给定的上界;因此,需要计算求解下面的最小化问题:
[0206][0207]
其中,mu是系统控制性能指标jk必须要满足的上界;
[0208]
步骤4.4:通过求解步骤4.3的最小化问题,计算得到控制增益lk,如下式所示:
[0209]
lk=-(b
t
hb+p)-1bt
hak[0210]
其中,h是一个矩阵,满足下面的方程:
[0211][0212]
控制增益计算模块将计算得到的控制增益lk以及系统状态估计值传送给控制输出计算模块。
[0213]
步骤5:基于计算得到的控制增益lk和系统状态估计值计算控制输出,并通过无线通信网络发送给执行器,实现对船舶的有效控制。控制输出值uk按下式计算:
[0214][0215]
控制输出uk经过信号发射器a,发送给信号接收器1~n,再传输给执行器1~n;最后经过执行器1~n实现对船舶1~n的控制,确保船舶航行安全。
[0216]
本实施例提供的船舶轨迹跟踪系统控制器及其控制方法,主要适用于船舶轨迹跟踪系统,特别适合于实现对船舶轨迹跟踪系统的有效控制,确保船舶的安全航行,并在保证满足系统控制性能指标的条件下,降低数据包传输时间延迟和乱序等问题对船舶轨迹跟踪系统造成的影响。
[0217]
最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽
管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明权利要求所限定的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1