一种基于本体的安装定位判别方法
1.本发明属于计算机辅助公差设计(cat)技术领域,具体涉及一种基于本体的安装定位判别方法,可用于生成语义化的装配体几何关系图,进而实现基于齐次坐标变换的统计装配公差建模。
背景技术:
2.在装配过程中,零件的实际装配定位约束常由主要的装配定位连接和辅助的装配定位连接构成。其中基于齐次坐标变换的统计装配公差建模过程中,将装配有向图改进为装配体几何关系图。为了实现公差分析的自动化,需要生成语义化的装配体几何关系图。因此需要进行安装定位判别。为了实现这种判别,本发明采用本体和矩阵分析的方法,对特征进行安装、定位判别。将装配体几何关系图语义化的同时,实现了快速有效且合理的特征判别。
技术实现要素:
3.本发明的目的是:本发明所要解决的技术问题是给出一种基于本体的安装定位判别方法,该方法可用于生成语义化的装配体几何关系图,其目的是实现基于齐次坐标变换的统计装配公差建模的自动化。
4.本发明采用的方案是:步骤1:在cad系统中利用api获得零件的干涉矩阵和邻接矩阵;干涉矩阵描述了装配体在笛卡尔坐标系下,任一零件沿坐标轴移动时与其他零件的干涉情况。用dk表示沿k方向的干涉矩阵,k={+x,-x,+y,-y,+z,-z }。由n个零件组成的装配体,其干涉矩阵dk是一个n阶方阵,如式(1):dk={a
ij
},a
ij
=,其中i,j=1,2,
…
,n邻接矩阵描述了装配体中任一零件与其他零件的邻接情况。此处邻接指的是特征之间具有重合关系。设由n个零件组成的装配体,其邻接矩阵m是一个n阶方阵,如式(2):m={b
ij
},b
ij =,其中i,j=1,2,
…
,n在solidworks环境下,可采用包容盒法对零件进行干涉检查。包容盒的体积略大于装配体。分别从六个方向使零件逐个移动到包容盒外,在每一次位姿变换下进行一次干涉检查,便可得到干涉矩阵;为了获得邻接矩阵,可采用遍历特征树的方法。首先提取所有的零件并存入数组,数组下标即零件的编号。然后遍历配合关系树,提取参与每个具有重合关系的两个特征,设为零件i与零件j,此时邻接矩阵中的元素b
ij
=1,b
ij
=1。
5.步骤2:利用干涉矩阵和邻接矩阵进行拆卸分析,获得零件的定位优先级与基础层级;
拆卸分析的实质是对干涉矩阵和邻接矩阵的一系列操作。这些操作描述了对装配体逐级拆卸的过程。拆卸分析的目的是获得零件的定位优先级和基础层级,所涉及定义如下:定义1 设某一干涉矩阵dk={a
ij
},若a
p1
=0,a
p2
=0,
…
,a
pn
=0,则零件p沿k方向移出包容盒过程中未与其他零件发生干涉,即当前状态下零件p满足可拆卸条件;定义2若零件p已拆卸,则对任意干涉矩阵dk={a
ij
}有a
1p
=0,a
2p
=0,
…
,a
np
=0,且对邻接矩阵m={b
ij
}有第p行元素与第p列元素皆为0;定义3若当前孤立结构中不包含基础件,则称当前孤立结构处于无支撑状态;定义4 设由若干零件组成的集合为零件集,若零件集a中任意零件p与零件集b中任意零件q皆处于非邻接状态,且a∩b=
ø
,则称零件集a与b满足孤立条件;定义5 设p1,
…
,pn分别为零件集,若p1,
…
,pn两两满足孤立条件,且当前孤立结构处于无支撑状态,则称p1,
…
,pn分别为新的孤立结构;定义6 在参数初始化阶段,装配体作为第一个孤立结构添加到孤立结构集;子装配体固化为不可拆分状态,其数学表示如下;定义7 子装配体的解固过程,即固化的逆向过程,其数学表示如下;解固的子装配体视为孤立结构;。
6.步骤3:将定位优先级与基础层级信息翻译并写入到owl文件中。
7.步骤4:在本体推理过程中,依靠零件的定位优先级与基础层级进行判定;在生成公差项目过程中,以安装特征作为公差类型标注的关联特征,以定位特征作为基准标注的关联特征。设特征a与特征b为一对配合特征,其基础层级分别为ca与cb,定位优先级分别为la与lb,安装/定位判定规则如下:规则1若ca与cb皆不为0,且ca》cb,则a为安装特征,b为定位特征;规则2若ca=0,cb不为0,则a为安装特征,b为定位特征;规则3若ca=cb=0,且la《lb,则a为安装特征,b为定位特征。
附图说明
8.图1:拆卸分析算法流程图图2:某型减速器部分装配体。
具体实施方式
9.以附图2所示的部分装配体的安装判定为例,对本发明的技术方案做进一步的说明,其具体步骤如下:步骤1:在cad系统中利用api获得零件的干涉矩阵和邻接矩阵;干涉矩阵行列代表的零件依次为大轴-1、机体1-1、大端盖-1、键12-1、大齿轮-1、大轴承端盖-2;所获得的邻接矩阵如下:所获得的干涉矩阵如下:。
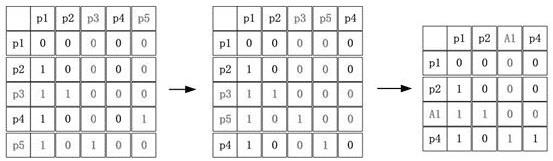
10.步骤2:利用干涉矩阵和邻接矩阵进行拆卸分析,获得零件的定位优先级与基础层级;(1)对初始矩阵,机体邻接数目最多,且满足拆卸条件。因此机体1-1的定位优先级为1,基础层级为1。拆卸机体1-1后,干涉矩阵变换如下:
(2)对新的干涉矩阵,两端盖满足拆卸条件,即x+第3行与x-第6行全为0;则大端盖-1、大轴承端盖-2的基础层级为0,定位优先级为2。然后对两端盖进行拆卸,拆卸后的矩阵变换如下:(3)对新的干涉矩阵,大齿轮-1满足拆卸条件,即x-第5行全为0;则大齿轮-1的基础层级为0,定位优先级为3。然后对大齿轮-1进行拆卸,拆卸后的矩阵变换如下:
(4)此时剩下大轴-1和键12-1两个零件,又由大轴-1的邻接数大于键12-1,则键12-1的基础层级为0,定位优先级为4。大轴的基础层级为1,定位优先级为4。
11.步骤3:将定位优先级与基础层级信息翻译并写入到owl文件中。
12.步骤4:在本体推理过程中,依靠零件的定位优先级与基础层级进行判定。
13.以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
技术特征:
1.一种基于本体的安装定位判别方法,其特征在于:包括如下步骤:步骤1:在cad系统中利用api获得零件的干涉矩阵和邻接矩阵;步骤2:利用干涉矩阵和邻接矩阵进行拆卸分析,获得零件的定位优先级与基础层级;步骤3:将定位优先级与基础层级信息翻译并写入到owl文件中;步骤4:在本体推理过程中,依靠零件的定位优先级与基础层级进行判定。2.如权利要求1所述的一种基于本体的安装定位判别方法,其特征在于:拆卸分析算法;拆卸分析的实质是对干涉矩阵和邻接矩阵的一系列操作;这些操作描述了对装配体逐级拆卸的过程;拆卸分析的目的是获得零件的定位优先级和基础层级,所涉及定义如下:定义1 设某一干涉矩阵d
k
={a
ij
},若a
p1
=0,a
p2
=0,
…
,a
pn
=0,则零件p沿k方向移出包容盒过程中未与其他零件发生干涉,即当前状态下零件p满足可拆卸条件;定义2若零件p已拆卸,则对任意干涉矩阵d
k
={a
ij
}有a
1p
=0,a
2p
=0,
…
,a
np
=0,且对邻接矩阵m={b
ij
}有第p行元素与第p列元素皆为0;定义3若当前孤立结构中不包含基础件,则称当前孤立结构处于无支撑状态;定义4 设由若干零件组成的集合为零件集,若零件集a中任意零件p与零件集b中任意零件q皆处于非邻接状态,且a∩b=
ø
,则称零件集a与b满足孤立条件;定义5 设p1,
…
,p
n
分别为零件集,若p1,
…
,p
n
两两满足孤立条件,且当前孤立结构处于无支撑状态,则称p1,
…
,p
n
分别为新的孤立结构;定义6 在参数初始化阶段,装配体作为第一个孤立结构添加到孤立结构集;子装配体固化为不可拆分状态,其数学表示如下;定义7 子装配体的解固过程,即固化的逆向过程,其数学表示如下;解固的子装配体视为孤立结构;。
技术总结
本发明公开一种基于本体的安装定位判别方法。基于齐次坐标变换的统计装配公差建模过程中,需要生成装配体几何关系图。自动生成装配体几何关系图的难点在于判别一对配合特征中,何者为安装特征,何者为定位特征。针对该问题,本发明采用本体和矩阵分析的方法,对特征进行安装、定位判别。将装配体几何关系图语义化的同时,实现了快速有效且合理的特征判别。实现了快速有效且合理的特征判别。
技术研发人员:黄美发 罗民宏 梁健伟 苟国秋 李健
受保护的技术使用者:桂林电子科技大学
技术研发日:2020.09.25
技术公布日:2022/3/29
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1