作业辅助装置及作业辅助方法与流程
1.本发明涉及对作业主体的作业进行辅助的作业辅助装置及作业辅助方法。
背景技术:
2.在产品等的制造现场实施的作业中,有时会发生忘记部件的安装,或者部件的取错这样的错误。与此相对,已知下述技术,即,通过对作业的错误进行检测,从而指示作业的返工,或为了理解作业而提示与正确的作业相关的视频。
3.例如,专利文献1的作业辅助装置在拍摄部的拍摄范围内,将表示对作业进行监视的范围的监视区域与实施各个作业的位置相应地设定。该专利文献1的作业辅助装置将测量出的图像的监视区域相应的部分和在比该图像之前的时刻测量出的其他图像中的监视区域相应的部分进行比较,由此进行将监视区域设为对象的动态检测。专利文献1的作业辅助装置在特定时间内能够进行动态检测的情况下通知“正常”,在无法进行动态检测的情况下通知“异常”。
4.专利文献1:日本特开2018-156279号公报
技术实现要素:
5.但是,在上述专利文献1的技术中,有可能在动态检测时进行误检测。例如,由专利文献1的作业辅助装置进行动态检测的对象设为作业主体的手。在作业主体经过监视区域的路径中将手伸向错误的位置的情况下,专利文献1的作业辅助装置对作业主体的手进行动态检测,因此尽管是错误的位置,也通知“正常”。如上所述,在专利文献1的作业辅助装置中,存在进行错误的作业辅助这样的问题。
6.本发明就是鉴于上述情况而提出的,其目的在于得到能够执行准确的作业辅助的作业辅助装置。
7.为了解决上述的课题,并达到目的,本发明是一种作业辅助装置,其对由通过作业主体实施的一系列的多个动作构成的作业进行辅助,具有传感器数据输入装置,其接收每次取得对作业主体的作业进行测量得到的传感器数据时排列的传感器数据列。另外,作业辅助装置具有:类别数据计算器,其将传感器数据列与针对传感器数据的时间性的变化的每个类型即类别而设定并由传感器数据的各时刻的概率分布构成的集合即模板进行比较,由此对表示将传感器数据列分割出的区间的类别数据列进行计算;以及信赖度计算器,其基于类别数据列所示的区间的信息,针对每个区间对相对于区间的信赖度进行计算。另外,作业辅助装置具有:信赖度判定器,其判定信赖度是否满足基准,生成区间之中的信赖度满足基准的区间所包含的动作的信息而作为第1辅助信息;以及通知器,其对第1辅助信息进行通知。
8.发明的效果
9.本发明所涉及的作业辅助装置具有能够执行准确的作业辅助这一效果。
附图说明
10.图1是表示实施方式1所涉及的作业辅助装置的结构的一个例子的图。
11.图2是对实施方式1所涉及的作业辅助装置的使用例进行说明的图。
12.图3是表示由实施方式1所涉及的传感器输出的传感器数据的一个例子的图。
13.图4是用于对由实施方式1所涉及的作业辅助装置所具有的传感器数据存储装置存储的传感器数据列的数据构造进行说明的图。
14.图5是将图4所示的传感器数据列通过时序图形表示的图。
15.图6是用于对由实施方式1所涉及的作业辅助装置所具有的作业信息存储装置存储的标准数据的数据构造进行说明的图。
16.图7是用于对由实施方式1所涉及的作业辅助装置所具有的作业信息存储装置存储的动作名称数据的数据构造进行说明的图。
17.图8是用于对由实施方式1所涉及的作业辅助装置所具有的作业信息存储装置存储的第1参考影像数据的数据构造进行说明的图。
18.图9是用于对由实施方式1所涉及的作业辅助装置所具有的作业信息存储装置存储的第1模板的数据构造进行说明的图。
19.图10是将图9所示的第1模板通过时序图形表示的图。
20.图11是用于对由实施方式1所涉及的作业辅助装置所具有的作业信息存储装置存储的第1类别转换概率的数据构造进行说明的图。
21.图12是用于对由实施方式1所涉及的作业辅助装置所具有的类别数据计算器生成的类别数据列的数据构造进行说明的图。
22.图13是将图12所示的类别数据列通过时序图形表示的图。
23.图14是用于对由实施方式1所涉及的作业辅助装置所具有的标准数据确定器生成的顺序数据值的数据构造进行说明的图。
24.图15是用于对由实施方式1所涉及的作业辅助装置所具有的区间评价器计算的区间评价值的数据构造进行说明的图。
25.图16是用于对由实施方式1所涉及的作业辅助装置所具有的信赖度计算器计算的信赖度的数据构造进行说明的图。
26.图17是用于对由实施方式1所涉及的作业辅助装置所具有的信赖度判定器判定出的信赖度的判定结果的数据构造进行说明的图。
27.图18是将由实施方式1所涉及的作业辅助装置所具有的信赖度判定器去除传感器数据的前后的传感器数据列通过时序图形表示的图。
28.图19是用于对由实施方式1所涉及的作业辅助装置所具有的作业实绩存储装置存储的实绩传感器数据列的数据构造进行说明的图。
29.图20是用于对由实施方式1所涉及的作业辅助装置所具有的作业实绩存储装置存储的实绩数据的数据构造进行说明的图。
30.图21是示意地表示实施方式1所涉及的作业辅助装置使显示装置进行显示的第1辅助信息及第2辅助信息的样式的图。
31.图22是表示由实施方式1所涉及的作业辅助装置执行的处理的处理顺序的流程图。
32.图23是表示实施方式1所涉及的作业辅助装置的硬件结构的第1例的图。
33.图24是表示实施方式1所涉及的作业辅助装置的硬件结构的第2例的图。
34.图25是表示实施方式2所涉及的作业辅助装置的结构的一个例子的图。
35.图26是用于对由实施方式2所涉及的作业辅助装置所具有的作业实绩存储装置存储的实绩数据的数据构造进行说明的图。
36.图27是用于对由实施方式2所涉及的作业辅助装置所具有的循环评价器检测出的检测结果数据的数据构造进行说明的图。
37.图28是示意地表示实施方式2所涉及的作业辅助装置使显示装置进行显示的第1辅助信息的样式的图。
38.图29是表示实施方式3所涉及的作业辅助装置的结构的一个例子的图。
39.图30是对实施方式3所涉及的作业辅助装置的使用例进行说明的图。
具体实施方式
40.下面,基于附图,对本发明的实施方式所涉及的作业辅助装置及作业辅助方法详细地进行说明。
41.实施方式1
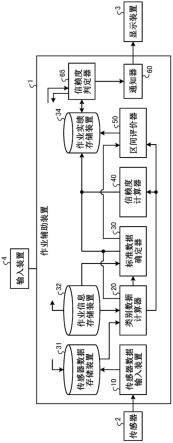
42.图1是表示实施方式1所涉及的作业辅助装置的结构的一个例子的图。作业辅助装置1是对由特定的作业主体实施的作业进行分析,执行作业辅助的计算机。
43.在实施方式1中,作业主体可以是1人或者多人、1个或者多个机械或者它们的组合。在实施方式1中,对作业主体为1人的情况进行说明。作业辅助装置1例如与传感器2、显示装置3及输入装置4一起搭载于工厂等中的任意的终端装置中。
44.在作业辅助装置1连接有传感器2、显示装置3及输入装置4。作业辅助装置1使用由传感器2测量出的数据(下面,称为传感器数据)对作业进行评价,基于评价值而生成表示作业辅助的辅助信息,对辅助信息进行通知。
45.作业辅助装置1具有传感器数据输入装置10、传感器数据存储装置31、作业信息存储装置32、类别数据计算器20、标准数据确定器30、信赖度计算器40、作业实绩存储装置34、区间评价器50、信赖度判定器65和通知器60。
46.传感器数据输入装置10取得从传感器2输出的时序的传感器数据,作为传感器数据列x而存储于传感器数据存储装置31。传感器数据存储装置31对每次取得传感器数据而排列的传感器数据列x进行存储。
47.作业信息存储装置32分别针对循环作业所包含的一系列的多个动作,对事先设计的标准数据进行存储。关于标准数据在后面记述。另外,作业信息存储装置32对循环作业所包含的动作的名称(后面记述的动作名称数据)、循环作业所包含的动作的影像(后面记述的第1参考影像数据)进行存储。
48.另外,作业信息存储装置32分别针对动作的类型即类别而对事先设计的模板进行存储。类别是分别针对循环作业所包含的一系列的多个动作而取得的传感器数据的时间性的变化的类型。模板包含有传感器数据的高斯分布的平均及高斯分布的方差。即,模板是针对传感器数据的时间性的变化的每个类型即类别而设定,由传感器数据的各时刻的概率分布构成的集合。关于模板的详细内容在后面记述。
49.另外,作业信息存储装置32对事先设计的第1类别转换概率进行存储。第1类别转换概率表示在由作业主体进行与类别之中的第1类别相对应的动作后,接下来实施与类别之中的第2类别相对应的动作的概率。即,第1类别转换概率表示从特定的类别转换至特定的类别的概率。
50.类别数据计算器20基于由传感器数据存储装置31存储的传感器数据列x和由作业信息存储装置32存储的模板,对类别数据列s进行计算。类别数据列s是表示传感器数据列x的区间及类别编号的数据列。类别数据计算器20将传感器数据列x分割为多个区间,将分割出的区间各自的时序的传感器数据分类为多个类别的任1个,由此对类别数据列s进行计算。类别数据计算器20将类别数据列s发送至标准数据确定器30、信赖度计算器40及区间评价器50。另外,类别数据计算器20生成将类别数据列s通过时序表示的时序图形,存储于作业实绩存储装置34。关于时序图形在后面记述。
51.标准数据确定器30针对将传感器数据列x分割出的各区间,即,类别数据列s所示的各区间,生成表示与各区间相对应的标准数据的值即顺序数据值。即,标准数据确定器30在各区间对标准数据进行设定,由此生成各区间的顺序数据值。标准数据确定器30基于作业信息存储装置32所存储的标准数据和从类别数据计算器20发送来的类别数据列s,生成顺序数据值。标准数据确定器30将顺序数据值发送至区间评价器50。另外,标准数据确定器30使顺序数据值存储于作业实绩存储装置34。
52.区间评价器50将类别数据列s和顺序数据值内的标准数据进行比较,由此对区间评价值进行计算,该区间评价值是对将传感器数据列x分割出的各区间进行评价而得到的值。区间评价器50使区间评价值存储于作业实绩存储装置34。
53.信赖度计算器40关于由类别数据计算器20计算出的类别数据列s所示的各区间,对信赖度rm进行计算。信赖度rm是计算出的各区间及各类别编号的信赖度。信赖度计算器40生成实绩传感器数据列,存储于作业实绩存储装置34,该实绩传感器数据列是每次取得信赖度rm满足基准的区间所包含的传感器数据而排列得到的。
54.作业实绩存储装置34对顺序数据值、区间评价值及实绩传感器数据列进行存储。另外,作业实绩存储装置34对后面记述的实绩类别数据列、实绩顺序数据值、实绩区间评价值这样的实绩数据进行存储。
55.信赖度判定器65将与信赖度rm满足基准的区间所包含的动作相关的信息(后面记述的第1辅助信息)、及仅最新的区间所包含的动作的信息(后面记述的第2辅助信息)输出至通知器60。信赖度判定器65使用作业信息存储装置32所存储的动作名称数据、第1参考影像数据等,生成第1辅助信息及第2辅助信息的至少一者,输出至通知器60。
56.另外,信赖度判定器65在信赖度rm满足基准的情况下,将信赖度rm满足基准的区间所包含的传感器数据从传感器数据列x去除,对传感器数据列x进行更新。另外,信赖度判定器65关于信赖度rm满足基准的区间,对表示作业的实绩的实绩数据进行更新。信赖度判定器65针对传感器数据存储装置31对传感器数据列x进行更新,针对作业实绩存储装置34对实绩数据进行更新。
57.通知器60将由信赖度判定器65生成的第1辅助信息及第2辅助信息输出至显示装置3。
58.图2是对实施方式1所涉及的作业辅助装置的使用例进行说明的图。在实施方式1
中,作业主体100遍及多次而反复地实施由一系列的多个动作构成的作业即循环作业。
59.(传感器2)
60.传感器2将通过对作业进行测量而检测出的传感器数据输出至作业辅助装置1。传感器2例如是深度传感器,配置为能够对通过作业主体100的左手101和右手102实施的作业进行拍摄。传感器2例如具有:光源,其以特定的图案使红外线发光;以及拍摄元件,其对由检测对象即如左手101及右手102这样的对象物反射出的红外线进行受光,传感器2生成将直至对象物为止的深度表示为像素值的深度图像数据。并且,传感器2根据深度图像数据,对作业主体100的左手101及右手102的高度位置分别进行检测,将这些高度位置作为传感器数据,例如每200毫秒进行输出。此外,作为深度传感器的具体例,举出如kinect(注册商标)这样的已有的深度传感器。根据深度图像数据对左手101及右手102的位置进行检测的处理,能够通过深度传感器所利用的已有的处理而实现。
61.作业辅助装置1从传感器2取得传感器数据,基于传感器数据,生成表示作业辅助的辅助信息。作业辅助装置1使辅助信息在显示装置3进行显示,由此将辅助信息通知给作业主体100。
62.图3是表示由实施方式1所涉及的传感器输出的传感器数据的一个例子的图。在图3中,横轴示出取得传感器数据的时刻,纵轴示出传感器数据的值即传感器值,即由传感器数据表示的左手101及右手102的高度位置的坐标值。在图3中,将左手101的高度位置的坐标值通过坐标值lh1表示,将右手102的高度位置的坐标值通过坐标值rh2表示。
63.在实施方式1中,传感器数据是作业主体100的左手101及右手102的高度位置,因此成为2维的值。
64.此外,在实施方式1中,对作为传感器2而使用深度传感器的情况进行说明,但并不限定于使用深度传感器,只要是能够对作业主体100的作业进行测量而生成传感器数据的装置即可,可以使用任意的装置。作为除了深度传感器以外的装置,例如能够使用摄像机、3维加速度传感器、3维角速度传感器等。另外,在实施方式1中,将作业主体100的左手101及右手102的位置设为传感器2的检测对象,但检测对象并不限定于这些。传感器2也可以将作业主体100的头部位置、身体中的多个关节的角度或者作业主体100的生物体信息作为检测对象。作业主体100的生物体信息的例子是心跳及呼吸。
65.(各结构要素的动作)
66.接下来,对作业辅助装置1的各结构要素的动作进行说明。
67.(传感器数据输入装置10)
68.传感器数据输入装置10取得从传感器2输出的时序的传感器数据,追加至在传感器数据存储装置31中存储的传感器数据列x的末尾。在实施方式1中,传感器数据输入装置10在每次由传感器2输出5个传感器数据时,在存储于传感器数据存储装置31的传感器数据列x的末尾追加5个传感器数据。在实施方式1中,传感器2每200毫秒输出传感器数据,因此传感器数据输入装置10以1秒为单位将5个传感器数据追加至传感器数据列x的末尾。
69.(传感器数据存储装置31)
70.传感器数据存储装置31对每次取得传感器数据而排列的传感器数据列x进行存储。在实施方式1中,传感器数据列x={x(1),x(2),
…
,x(n)}。在这里,x(n)是在传感器数据列x中第n个取得的传感器数据。另外,n是传感器数据列x所包含的传感器数据的个数。n为
正整数,n为1至n为止的正整数。
71.图4是用于对由实施方式1所涉及的作业辅助装置所具有的传感器数据存储装置存储的传感器数据列的数据构造进行说明的图。在实施方式1中,传感器数据为2维的值,因此传感器数据存储装置31将传感器数据列x(n)作为2个值进行存储。传感器数据列sd1~sd4分别示出在动作开始后直至1秒后、2秒后、3秒后、4秒后为止所取得的传感器数据列x的构造。
72.在实施方式1中,传感器2每200毫秒将传感器数据进行输出,因此在传感器数据列sd1~sd4中,传感器数据的个数n分别为5个、10个、15个、20个。即,传感器数据列sd1包含有传感器数据列x(1)~x(5),传感器数据列sd2包含有传感器数据列x(1)~x(10)。另外,传感器数据列sd3包含有传感器数据列x(1)~x(15),传感器数据列sd4包含有传感器数据列x(1)~x(20)。
73.传感器数据列sd2是在传感器数据列sd1的末尾追加1秒后至2秒后为止所取得的传感器数据列x(6)~x(10)而生成的。传感器数据列sd3是在传感器数据列sd2的末尾追加2秒后至3秒后为止所取得的传感器数据列x(11)~x(15)而生成的。传感器数据列sd4是在传感器数据列sd3的末尾追加3秒后至4秒后为止所取得的传感器数据列x(16)~x(20)而生成的。
74.图5是将图4所示的传感器数据列通过时序图形表示的图。在图5中,横轴示出在传感器数据列x中将时序的传感器数据输出的编号n,纵轴示出传感器数据的传感器值。时序图形g1与传感器数据列sd1相对应,时序图形g2与传感器数据列sd2相对应。时序图形g3与传感器数据列sd3相对应,时序图形g4与传感器数据列sd4相对应。
75.传感器数据输入装置10基于传感器数据列sd1而生成时序图形g1,基于传感器数据列sd2而生成时序图形g2。另外,传感器数据输入装置10基于传感器数据列sd3而生成时序图形g3,基于传感器数据列sd4而生成时序图形g4。传感器数据输入装置10使时序图形g1~g4存储于传感器数据存储装置31。
76.(作业信息存储装置32)
77.接下来,对实施方式1所涉及的作业信息存储装置32进行说明。
78.(作业信息存储装置32:标准数据列)
79.作业信息存储装置32分别针对循环作业所包含的一系列的多个动作对事先设计的标准数据列std进行存储。标准数据列std={std(1),std(2),
…
,std(f)}。std(f)是针对循环作业所包含的第f个动作而事先设计的标准数据。f是用于对多个标准数据分别进行识别的编号,是1至f为止的正整数。f是循环作业所包含的一系列的多个动作的顺序。f是循环作业所包含的标准数据的个数,是事先设计的动作的个数。
80.在实施方式1中,标准数据列std(f)由针对循环作业所包含的第f个动作而事先设计的动作的时间上的长度和动作的类型即类别构成。
81.std(f)={stdb(f),stdc(f)}。stdb(f)是针对循环作业所包含的第f个动作而事先设计的表示时间的长度的标准长度。stdc(f)是针对循环作业所包含的第f个动作而事先设计的表示类别的类别编号的标准类别编号。
82.图6是用于对由实施方式1所涉及的作业辅助装置所具有的作业信息存储装置存储的标准数据的数据构造进行说明的图。在图6的标准数据列std(f)的例子中,示出了在循
环作业中包含f=10个动作的情况。标准数据列std(f)包含有stdb(f)及stdc(f)。
83.在图6中,标准类别编号即stdc(f)各自成为与f一致的值,但无需一定是一致的值。另外,标准数据列std(f)可以包含有多个具有同一标准类别编号的标准数据。即,在循环作业中,可以多次实施同一动作。
84.(作业信息存储装置32:动作名称数据)
85.实施方式1所涉及的作业信息存储装置32还对循环作业所包含的第f个动作的名称即动作名称数据label(f)进行存储。在这里的f也是用于对多个标准数据各自进行识别的编号,是1至f为止的整数。f是上述标准数据的个数。
86.图7是用于对由实施方式1所涉及的作业辅助装置所具有的作业信息存储装置存储的动作名称数据的数据构造进行说明的图。在图7的动作名称数据label(f)的例子中,与图6同样地,示出了由作业主体100实施f=10个动作的情况。
87.(作业信息存储装置32:第1参考影像数据)
88.实施方式1所涉及的作业信息存储装置32还对指示循环作业所包含的第f个动作的影像即第1参考影像数据ref(f)进行存储。在这里的f也是用于对由作业主体100实施的一系列的多个动作进行识别的编号,是1至f为止的整数。f是上述标准数据的个数。
89.图8是用于对由实施方式1所涉及的作业辅助装置所具有的作业信息存储装置存储的第1参考影像数据的数据构造进行说明的图。在图8的第1参考影像数据ref(f)的例子中,与图6同样地,示出了在循环作业中包含有f=10个动作的情况。即,在这里的第1参考影像数据ref(f)中包含有动作数为10个的影像数据。
90.(作业信息存储装置32:第1模板)
91.作业信息存储装置32还对分别针对上述类别而事先设计的第1模板gj进行存储。在这里的j是用于对多个类别分别进行识别的编号,是1至j为止的正整数。j是上述的类别的个数,即,是第1模板gj的个数。
92.在实施方式1中,第1模板gj是由各时刻的传感器数据的高斯分布构成的集合。在该情况下,第1模板gj能够设计为针对与类别j相对应的动作而取得的传感器数据的高斯分布的参数。第1模板gj={gj(1),gj(2),
…
,gj(l)}。gj(i)是针对与类别j相对应的动作而取得的第i(i为1至l为止的正整数)个传感器数据的高斯分布的参数,gj(i)={μj(i),σ
j2
(i)}。在这里,μj(i)是高斯分布的平均,σ
j2
(i)是高斯分布的方差。另外,l是第1模板gj的长度,即,表示针对各个动作而取得的传感器数据的个数的最大值。
93.关于实施方式1所涉及的第1模板gj,更具体地进行说明。如上所述,μj(i)是针对与类别j相对应的动作而取得的第i个传感器数据的高斯分布的平均。μj(i)与传感器数据同样地,是2维的值。另外,σ
j2
(i)是针对与类别j相对应的动作而取得的第i个传感器数据的高斯分布的方差。在实施方式1中,传感器数据的高斯分布的方差在任意的维度中也假定成为相同。因此,σ
j2
(i)是1维的值。
94.图9是用于对由实施方式1所涉及的作业辅助装置所具有的作业信息存储装置存储的第1模板的数据构造进行说明的图。第1模板gj(i)包含有μj(i)和σ
j2
(i)。在图9的第1模板gj(i)的例子中,类别的个数j=10。如上所述,j是用于对类别进行识别的编号。另外,在图9的例子中,第1模板gj(i)的长度l=20。
95.图10是将图9所示的第1模板通过时序图形表示的图。在时序图形201中包含有与
各类别j相对应的第1模板gj。即,在时序图形201中包含有与各类别j相对应的第1模板g
1~10
。在图10中,将类别j的第1模板gj通过时序图形gta(j)、gtb(j)表示。时序图形gta(j)是μj(i)的时序图形,时序图形gtb(j)是σ
j2
(i)的时序图形。在时序图形201中,作为类别1~10的第1模板g
1~10
,包含有时序图形gta(1)、gtb(1)~gta(10)、gtb(10)。
96.时序图形gta(j)、gtb(j)均是横轴为针对与各类别j相对应的动作而取得的传感器数据的编号i。时序图形gta(j)的纵轴是针对与各类别j相对应的动作而取得的传感器数据的高斯分布的平均即μj(i)。时序图形gtb(j)的纵轴是针对与各类别j相对应的动作而取得的传感器数据的高斯分布的方差即σ
j2
(i)。
97.如前述所示,高斯分布的平均与传感器数据同样地是2维的值。另外,高斯分布的方差在任意的维度中也假定成为相同。因此,高斯分布的方差是1维的值。
98.(作业信息存储装置32:第1类别转换概率)
99.实施方式1所涉及的作业信息存储装置32还对事先设计的第1类别转换概率p(j|j’)进行存储。在这里,j及j’都是用于分别对多个类别进行识别的编号。p(j|j’)表示在由作业主体100进行与类别j’相对应的动作后,接下来实施与类别j相对应的动作的概率。
100.图11是用于对由实施方式1所涉及的作业辅助装置所具有的作业信息存储装置存储的第1类别转换概率的数据构造进行说明的图。如上所述,j及j’均是用于对类别进行识别的编号。在图11中,示出了j=1~10和j’=1~10的组合的第1类别转换概率p(j|j’)的值。
101.(类别数据计算器20)
102.接下来,对实施方式1所涉及的类别数据计算器20进行说明。类别数据计算器20基于由传感器数据存储装置31存储的传感器数据列x和由作业信息存储装置32存储的各模板gj,对类别数据列s进行计算。
103.详细地说,类别数据计算器20决定将传感器数据列x时间性地分割出的多个区间,以及表示各区间所包含的传感器数据的时间变化的类型的各区间的类别。
104.并且,类别数据计算器20针对传感器数据列x,生成分别表示该传感器数据列x的各区间及各类别编号的类别数据列s。类别数据列s={s1,s2,
…
,sm,
…
,sm}。m(m为正整数)是类别数据列s所包含的区间的个数,即,将传感器数据列x分割出的区间的个数。
105.m是用于对将传感器数据列x分割出的多个区间各自进行识别的编号,是1至m为止的整数。m是表示将传感器数据列x分割出的各区间之中的最新的区间的编号。m是传感器数据列x中的多个区间的顺序。
106.sm是将传感器数据列x分割出的第m个区间中的类别数据列s的要素,sm={am,bm,cm}。am是将传感器数据列x分割出的第m个区间的开始编号,bm是将传感器数据列x分割出的第m个区间的长度,cm是对将传感器数据列x分割出的第m个区间进行分类的类别编号。类别数据计算器20使用类别数据列sm={am,bm,cm},由此,例如能够将对传感器数据列x进行分割得到的第m个区间所包含的时序的传感器数据xm表示为xm={x(am),x(a
m+1
),
…
,x(am+bm-1)}。
107.在实施方式1中,作业辅助装置1使用ff-bs(forward filtering-backward sampling,正向滤波-反向采样),由此将传感器数据列x分割出多个区间,将分割出的区间各自的时序的传感器数据分类为多个类别的任1个。ff-bs由ff步骤所涉及的概率计算和
bs步骤所涉及的分割及分类这2个步骤构成。
108.(类别数据计算器20:ff步骤)
109.首先,对ff步骤进行说明。在ff步骤中,类别数据计算器20使用以下的式(1),将根据传感器数据列x中的第n个传感器数据列x(n)与类别j相对应的第1模板gj(i)的第i个高斯分布而生成的概率p(x(n)|xj,ij)计算为高斯分布normal。
110.另外,类别数据计算器20在从已经分割出第1个至第n-i个区间的传感器数据列x,能够进一步对第n个区间进行分割时,使用以下的式(2),对第n个区间的类别为j的概率α[n][i][j]进行计算。p(j|j’)是上述的第1类别转换概率。式(2)是循环公式,类别数据计算器20能够从n=1至n=n为止依次对概率α[n][i][j]进行计算。
[0111]
【式1】
[0112][0113]
【式2】
[0114][0115]
(类别数据计算器20:bs步骤)
[0116]
接下来,对bs步骤进行说明。在bs步骤中,关于将传感器数据列x分割出的区间,类别数据计算器20使用以下的式(3)对类别数据进行采样。在式(3)中,第1行的b
m’及c
m’是从右边的概率分布得到的随机变量,第2行是变量a
m’的循环公式。
[0117]
【式3】
[0118][0119]
根据式(3),类别数据计算器20从m’=1至m’=m为止依次能够生成类别数据s
m’={a
m’,b
m’,c
m’}。在这里,m是通过式(3)将传感器数据列x分割出的区间的个数。另外,s
m’是将传感器数据列x分割出的从后方起第m’个区间中的类别数据。在式(3)中,从传感器数据列x的后方起依次对将传感器数据列x分割出的区间中的类别数据进行计算。即,将传感器数据列x分割出的从前方起第m个区间中的类别数据列sm={am,bm,cm}={a
m-m’+1
,b
m-m’+1
,c
m-m’+1
}。
[0120]
图12是用于对由实施方式1所涉及的作业辅助装置所具有的类别数据计算器生成的类别数据列的数据构造进行说明的图。在图12中,示出从图4所示的传感器数据列x,基于多个第1模板gj而生成的类别数据列202。另外,类别的个数j=10。
[0121]
在类别数据列202中,作为与传感器数据列sd1~sd4相对应的类别数据列sm而包含有类别数据cd1~cd4。类别数据cd1、cd2都包含有类别数据s1。另外,类别数据cd3包含有类别数据s1、s2。另外,类别数据cd4包含有类别数据s1、s2、s3。
[0122]
图13是将图12所示的类别数据列通过时序图形表示的图。在时序图形203中包含有与类别数据cd1~cd4相对应的时序图形ga1~ga4。在图13中,横轴与图5同样地,是在传感器数据列x中将时序的传感器数据输出的编号n。
[0123]
类别数据计算器20基于类别数据cd1而生成时序图形ga1,基于类别数据cd2而生成时序图形ga2。另外,类别数据计算器20基于类别数据cd3而生成时序图形ga3,基于类别数据cd4而生成时序图形ga4。类别数据计算器20使生成的时序图形ga1~ga4存储于作业实绩存储装置34。
[0124]
包含数字“1”~“10”的任意者的各矩形表示将传感器数据列x分割出的各区间[am,am+bm-1]。另外,在各区间的任意区间中记述的数字“1”~“10”表示对各区间进行分类后的类别编号cm。例如,在时序图形ga4中,m=1的区间是am=1、am+bm-1=10、cm=1。另外,m=2的区间是am=10、am+bm-1=17、cm=2,m=3的区间是am=18、am+bm-1=20、cm=3。
[0125]
(类别数据计算器20:快报性的依据)
[0126]
通常来说,在由作业主体100刚开始一系列的动作所包含的循环作业的各动作后,针对动作而取得的传感器数据的个数少,因此存在与类别编号cm的推定相关的精度劣化的倾向。
[0127]
另一方面,类别数据计算器20在由作业主体100刚分别开始循环作业所包含的各动作后,也能够对与各个动作相对应的区间及类别编号cm高精度地进行推定。即,类别数据计算器20概率地对将传感器数据列x分割出的各区间进行采样并进行推定,因此能够推定由作业主体100实施的动作从前1个动作变化为该动作。并且,能够针对该动作而取得的传感器数据的个数为少数,但类别数据计算器20通过使用第1类别转换概率,从而能够考虑与该动作的前1个动作相对应的区间的类别编号cm而对与该动作相对应的区间的类别编号cm进行推定。
[0128]
(标准数据确定器30)
[0129]
接下来,对实施方式1所涉及的标准数据确定器30进行说明。标准数据确定器30生成表示与将传感器数据列x分割出的各区间相对应的标准数据的值即顺序数据值。顺序数据值lm是在将传感器数据列x分割出的第m个区间中生成的顺序数据值,是与将传感器数据列x分割出的第m个区间相对应的标准数据列std(lm)。
[0130]
实施方式1中的标准数据确定器30针对将由类别数据计算器20计算出的类别数据列sm所包含的类别编号cm的系列{c1,c2,
…
,cm}和标准数据列std(lm)所包含的标准类别编号的系列连接多个而成的系列,使用多序列排列等弹性匹配方法,由此生成顺序数据值lm。在实施方式1中,标准数据确定器30针对将标准类别编号的系列连接2个而成的系列{stdc1,stdc2,
…
,stdcf,stdc1,stdc2,
…
,stdcf}使用弹性匹配方法。
[0131]
由作业主体100实施的循环作业遍及多次而反复地实施,因此在类别数据列s所包含的类别编号cm的系列中,有时将与循环作业的最后的动作相对应的类别编号cm和与循环作业的最初的动作相对应的类别编号cm排列而包含。针对如上所述的系列,标准数据确定器30也如上述所示与将标准数据列std(lm)所包含的标准类别编号的系列连接多个而成的系列相比较,由此能够容易地生成顺序数据值lm。标准数据确定器30在针对将传感器数据列x分割出的第m个区间,多个标准数据都不对应的情况下,作为顺序数据值lm对na进行计算。
[0132]
图14是用于对由实施方式1所涉及的作业辅助装置所具有的标准数据确定器生成的顺序数据值的数据构造进行说明的图。在图14中,示出了将图12所示的类别数据列sm和由标准数据确定器30生成的顺序数据值lm相关联而排列的对应数据组204。在对应数据组204中包含有与类别数据cd1~cd4相对应的顺序数据值lm。在图14中,将类别数据cd1和顺序数据值lm相关联的数据通过数据dl1表示,将类别数据cd2和顺序数据值lm相关联的数据通过数据dl2表示。另外,将类别数据cd3和顺序数据值lm相关联的数据通过数据dl3表示,将类别数据cd4和顺序数据值lm相关联的数据通过数据dl4表示。标准数据确定器30使对应
数据组204存储于作业实绩存储装置34。
[0133]
(标准数据确定器30:对在循环作业中包含多次的同一动作进行区分)
[0134]
标准数据确定器30在循环作业中多次实施同一动作的情况下,也能够对与各个动作相对应的顺序进行确定。即,标准数据确定器30不仅将单一类别数据、还将多个类别数据的系列即类别数据列sm和标准数据的系列即标准数据列std(lm)进行比较,因此在循环作业中包含具有同一类别编号cm的多个类别数据的情况下,也能够对表示与各自相对应的标准数据的顺序数据值lm进行确定。
[0135]
(区间评价器50)
[0136]
接下来,对实施方式1所涉及的区间评价器50进行说明。区间评价器50计算对将传感器数据列x分割出的各区间进行评价得到的值即区间评价值。区间评价器50将类别数据列sm和对应的标准数据进行比较,由此对区间评价值进行计算。
[0137]
在实施方式1中,区间评价器50针对区间m对区间评价值vm进行计算。vm={vbm,vcm}。vbm是对将传感器数据列x分割出的第m个区间的长度bm是否超过标准长度stdb(lm)进行评价得到的值。区间评价器50使用以下的式(4)对vbm进行计算。在这里,len
coef
是特定的系数,在实施方式1中设为len
coef
=1.5。另外,vcm是对将传感器数据列x分割出的第m个区间的类别编号cm是否与标准类别编号stdc(lm)一致进行评价得到的值。区间评价器50使用以下的式(5)对vcm进行计算。
[0138]
【式4】
[0139][0140]
【式5】
[0141][0142]
图15是用于对由实施方式1所涉及的作业辅助装置所具有的区间评价器计算的区间评价值的数据构造进行说明的图。在图15中,示出了将图14所示的类别数据列sm、顺序数据值lm和由区间评价器50计算出的区间评价值vm相关联而排列出的对应数据组205。
[0143]
在对应数据组205中,包含有与类别数据cd1~cd4相对应的区间评价值vm。在图15中,将类别数据cd1、顺序数据值lm和区间评价值vm相关联的数据通过数据dv1表示,将类别数据cd2、顺序数据值lm和区间评价值vm相关联的数据通过数据dv2表示。另外,将类别数据cd3、顺序数据值lm和区间评价值vm相关联的数据通过数据dv3表示,将类别数据cd4、区间评价值vm和顺序数据值lm相关联的数据通过数据dv4表示。
[0144]
通过使用顺序数据值lm,从而将传感器数据列x分割出的第m个区间所对应的标准数据能够表现为std(lm)。例如图15的数据dv3的第2个区间中的顺序数据值是顺序数据值l2=1,对应的标准数据根据图6,是std(1)={stdb(1),stdc(1)}={8,1}。另外,数据dv3的第2个区间中的类别数据s2={a2,b2,c2}={3,13,1}。即,根据式(4),b2=13>stdb(1)
×
len
coef
=12,因此对vb2=“异常”进行计算。
[0145]
区间评价器50针对各vbm和各vcm对“正常”或者“异常”进行计算,登记于对应数据组205。区间评价器50使对应数据组205存储于作业实绩存储装置34。
[0146]
(信赖度计算器40)
[0147]
接下来,对实施方式1所涉及的信赖度计算器40进行说明。信赖度计算器40关于由类别数据计算器20计算出的类别数据列sm所示的各区间,对信赖度rm进行计算。rm是将传感器数据列x分割出的第m个区间中的信赖度。在实施方式1中,信赖度计算器40对将传感器数据列x分割出的各区间按照从新区间算起的顺序进行计算而作为信赖度rm。
[0148]
图16是用于对由实施方式1所涉及的作业辅助装置所具有的信赖度计算器计算的信赖度的数据构造进行说明的图。在图16中,示出了将图15所示的类别数据列sm和由信赖度计算器40计算出的信赖度rm相关联而排列的对应数据组206。
[0149]
在对应数据组206中包含有与类别数据cd1~cd4相对应的信赖度rm。在图16中,将类别数据cd1和信赖度rm相关联的数据通过数据dr1表示,将类别数据cd2和信赖度rm相关联的数据通过数据dr2表示。另外,将类别数据cd3和信赖度rm相关联的数据通过数据dr3表示,将类别数据cd4和信赖度rm相关联的数据通过数据dr4表示。
[0150]
(信赖度计算器40:信赖度rm的变动状况)
[0151]
此外,实施方式1的信赖度计算器40在信赖度rm的计算时,使用从将传感器数据列x分割出的各区间的后方算起的顺序,但并不限定于此。在实施方式1中类别数据列sm所示的各区间及各类别编号cm在每次得到新的传感器数据时重新进行计算。如上所述,在新得到传感器数据的情况下,信赖度计算器40可以将前次计算出的各区间及各类别编号cm与新计算出的各区间及各类别编号cm比较后的一致度作为信赖度rm。即,信赖度计算器40可以是上述一致度越高,则判定为计算出的各区间及各类别编号cm的信赖度rm越高。
[0152]
另外,信赖度计算器40例如可以将当前的时刻和将传感器数据分割出的各区间的结束时刻的时间差作为信赖度rm。即,信赖度计算器40可以是上述时间差越长,则判定为计算出的各区间及各类别编号cm的信赖度rm越高。在上述举例的信赖度rm中,都是针对将传感器数据列x分割出的各区间所包含的动作而得到的传感器数据越少则信赖度rm变得越低,传感器数据越多则信赖度rm变得越高。
[0153]
另外,信赖度计算器40可以将对传感器数据列x进行分割得到的各区间所包含的传感器数据和与各区间中的类别编号cm相对应的第1模板gj进行比较的一致度作为信赖度rm。信赖度计算器40使对应数据组206存储于作业实绩存储装置34。
[0154]
(作业实绩存储装置34)
[0155]
作业实绩存储装置34对将每次取得对传感器数据列x进行分割得到的各区间之中的信赖度rm满足基准的区间所包含的传感器数据时排列的实绩传感器数据列进行存储。
[0156]
作业实绩存储装置34还对分别表示实绩传感器数据列的各区间及各类别编号cm的实绩类别数据列进行存储。
[0157]
作业实绩存储装置34还对表示与将实绩传感器数据列分割出的各区间相对应的标准数据的值即实绩顺序数据值进行存储。
[0158]
作业实绩存储装置34还对将实绩传感器数据列分割出的各区间中的区间评价值vm即实绩区间评价值进行存储。
[0159]
作业实绩存储装置34按照来自信赖度判定器65的指示,对实绩传感器数据列、实绩类别数据列、实绩顺序数据值及实绩区间评价值进行存储。
[0160]
(信赖度判定器65)
[0161]
接下来,对实施方式1所涉及的信赖度判定器65进行说明。信赖度判定器65判定由信赖度计算器40计算出的各区间中的信赖度rm是否满足特定的基准。在实施方式1中,信赖度判定器65在信赖度rm超过2的情况下判定为满足基准。即,信赖度判定器65通过信赖度rm>2的真伪,对各区间中的信赖度rm的判定结果进行计算。
[0162]
图17是用于对由实施方式1所涉及的作业辅助装置所具有的信赖度判定器判定出的信赖度的判定结果的数据构造进行说明的图。在图17中,示出了将图16所示的类别数据列sm及信赖度rm和由信赖度判定器65判定出的信赖度rm的判定结果相关联而排列的对应数据组207。在这里,对信赖度rm的基准为2,信赖度判定器65在rm>2的情况下判定为信赖度rm满足基准的情况进行说明。在图17中,在rm>2的列中记述的字符串“true”表示信赖度rm满足基准,“false”表示信赖度rm不满足基准。
[0163]
在对应数据组207中包含有与类别数据cd1~cd4相对应的信赖度rm的判定结果。在图17中,将类别数据cd1、信赖度rm和信赖度rm的判定结果相关联的数据通过数据dj1表示,将类别数据cd2、信赖度rm和信赖度rm的判定结果相关联的数据通过数据dj2表示。另外,将类别数据cd3、信赖度rm和信赖度rm的判定结果相关联的数据通过数据dj3表示,将类别数据cd4、信赖度rm和信赖度rm的判定结果相关联的数据通过数据dj4表示。在图17的例子中,数据dj4中的仅第1个区间的信赖度r1满足基准。
[0164]
(信赖度判定器65:第2辅助信息)
[0165]
信赖度判定器65生成第2辅助信息。实施方式1中的第2辅助信息包含有将传感器数据列x分割出的第m个区间中的区间评价值vm、与第m个区间相对应的动作名称数据label(lm)和与第m个区间相对应的第1参考影像数据ref(lm)。如上所述,m是表示将传感器数据列x分割出的各区间之中的最新的区间的编号。因此,第2辅助信息是类别数据列sm所示的区间之中的最新的区间所包含的动作的信息。信赖度判定器65基于区间评价值vm,生成第2辅助信息,由此能够进行基于各动作所花费的时间的长短或者各动作的类别的正误的作业辅助。
[0166]
(信赖度判定器65:更新传感器数据列x)
[0167]
信赖度判定器65还将信赖度rm满足基准的区间所包含的传感器数据从传感器数据列x去除,对传感器数据存储装置31内的传感器数据列x进行更新。
[0168]
图18是将由实施方式1所涉及的作业辅助装置所具有的信赖度判定器去除传感器数据的前后的传感器数据列通过时序图形表示的图。图18中的上部的图形是由信赖度判定器65将传感器数据去除前的传感器数据列x,示出与图5的最下部的图形相同的图形。
[0169]
实施方式1所涉及的信赖度判定器65在图17的数据dj4中判定为在第1个区间中信赖度rm满足基准,因此去除将传感器数据列x分割出的第1个区间所包含的时序的传感器数据列1={x(a1),x(a2),
…
,x(a1+b1-1)}={x(1),x(2),
…
,x(9)}。图18中的下部的图形是由信赖度判定器65将传感器数据去除后的传感器数据列x。传感器数据列x将{x(1),x(2),
…
,x(9)}去除,由此去除前的{x(10),x(11),
…
,x(20)}成为去除后的{x(1),x(2),
…
,x(11)}。
[0170]
(信赖度判定器65:追加实绩传感器数据列)
[0171]
信赖度判定器65还对在作业实绩存储装置34中存储的实绩传感器数据列进行更新。在实施方式1中,信赖度判定器65将对传感器数据列x进行分割得到的各区间之中的信
赖度rm满足基准的区间所包含的传感器数据追加至实绩传感器数据列。
[0172]
图19是用于对由实施方式1所涉及的作业辅助装置所具有的作业实绩存储装置存储的实绩传感器数据列的数据构造进行说明的图。在实施方式1中,传感器数据为2维的值,因此作业实绩存储装置34对实绩传感器数据列hx(n2)作为2个值进行存储。在实施方式1中,实绩传感器数据列hx={hx(1),hx(2),
…
,hx(n2)}。在这里,hx(n2)是在实绩传感器数据列hx中第n2个取得的传感器数据。另外,n2是实绩传感器数据列hx所包含的传感器数据的个数。
[0173]
(信赖度判定器65:追加实绩类别数据列)
[0174]
信赖度判定器65还对由作业实绩存储装置34存储的实绩类别数据列hs进行更新。实绩类别数据列hs={hs1,hs2,
…
,hs
m2
,
…
,hs
m2
}。在这里,m2是实绩类别数据列hs所包含的区间的个数,即,将实绩传感器数据列hx分割出的区间的个数。m2是用于对将实绩传感器数据列hx分割出的多个区间各自进行识别的编号,是1至m2为止的整数。m2是实绩传感器数据列hx中的多个区间的顺序。hs
m2
是将实绩传感器数据列hx分割出的第m2个区间中的实绩类别数据列hs的要素,hs
m2
={ha
m2
,hb
m2
,hc
m2
}。ha
m2
是将实绩传感器数据列hx分割出的第m2个区间的开始编号,hb
m2
是将实绩传感器数据列hx分割出的第m2个区间的长度,hc
m2
是对将实绩传感器数据列hx分割出的第m2个区间分类后的类别编号。使用实绩类别数据列hs
m2
={ha
m2
,hb
m2
,hc
m2
},由此例如将实绩传感器数据列hx分割出的第m2个区间所包含的时序的传感器数据能够表示为{hx(ha
m2
),hx(ha
m2+1
),
…
,hx(ha
m2
+hb
m2
-1)}。
[0175]
在实施方式1中,信赖度判定器65将对传感器数据列x进行分割得到的各区间之中的信赖度rm满足基准的区间及类别编号cm追加至实绩类别数据列hs。
[0176]
(信赖度判定器65:追加实绩顺序数据值)
[0177]
信赖度判定器65还将新的实绩顺序数据值追加至作业实绩存储装置34。在实施方式1中,信赖度判定器65将与对传感器数据列x进行分割得到的各区间之中的信赖度rm满足基准的区间相对应的顺序数据值作为新的实绩顺序数据值进行追加。由信赖度判定器65追加的新的实绩顺序数据值是表示与将实绩传感器数据列hx分割出的第m2个区间相对应的标准数据的实绩顺序数据值hl
m2
。
[0178]
(信赖度判定器65:追加实绩区间评价值)
[0179]
信赖度判定器65还将新的实绩区间评价值追加至作业实绩存储装置34。在实施方式1中,信赖度判定器65将对传感器数据列x进行分割得到的各区间之中的信赖度rm满足基准的区间中的区间评价值vm作为新的实绩区间评价值进行追加。将实绩传感器数据列hx分割出的第m2个区间中的实绩区间评价值是实绩区间评价值hv
m2
={hvb
m2
,hvc
m2
}。在这里,hvb
m2
是对将实绩传感器数据列hx分割得到的第m2个区间的长度hb
m2
是否超过标准长度stdb(hl
m2
)进行评价得到的值。hvc
m2
是对将实绩传感器数据列hx分割出的第m2个区间的类别编号hc
m2
是否与标准类别编号stdc(hl
m2
)一致进行评价得到的值。
[0180]
(信赖度判定器65:实绩数据)
[0181]
图20是用于对由实施方式1所涉及的作业辅助装置所具有的作业实绩存储装置存储的实绩数据的数据构造进行说明的图。在由信赖度判定器65存储于作业实绩存储装置34的实绩数据208中,包含有实绩类别数据列hs
m2
、实绩顺序数据值hl
m2
及实绩区间评价值hv
m2
。
[0182]
在图20的例子中,实绩类别数据列hs
m2
所包含的区间的个数m2=1,将图19所示的实绩传感器数据列hx分割为1个区间。在图20所示的实绩顺序数据值hl
m2
、实绩区间评价值hv
m2
分别追加有表示在图17的数据dj4中信赖度rm满足基准的第1个区间所对应的标准数据的顺序数据值l1、区间评价值v1的值。
[0183]
(信赖度判定器65:第1辅助信息)
[0184]
信赖度判定器65生成第1辅助信息。实施方式1中的第1辅助信息是将实绩传感器数据列hx分割出的各区间中的实绩区间评价值hv
m2
及各区间所对应的动作名称数据。第1辅助信息的实绩区间评价值是将实绩传感器数据列hx分割出的第m2个区间中的实绩区间评价值hv
m2
,第1辅助信息的动作名称数据是第m2个区间所对应的动作名称数据label(hl
m2
)。信赖度判定器65基于实绩区间评价值hv
m2
,生成第1辅助信息,由此能够进行基于各循环作业所花费的时间或者各循环作业中的作业的遗漏的作业辅助。
[0185]
(通知器60)
[0186]
接下来,对实施方式1所涉及的通知器60进行说明。通知器60将由信赖度判定器65生成的第1辅助信息及第2辅助信息输出至显示装置3。通知器60输出的第1辅助信息是与将传感器数据列x分割出的各区间之中的信赖度rm满足基准的区间所包含的动作相关的信息。另外,通知器60输出的第2辅助信息是与将传感器数据列x分割出的各区间之中的仅最新的区间所包含的动作相关的信息。另外,通知器60按照来自信赖度判定器65的指示,以将第1参考影像数据ref(lm)重复播放的方式进行通知。
[0187]
(显示装置3)
[0188]
接下来,对实施方式1所涉及的显示装置3进行说明。实施方式1所涉及的显示装置3是液晶显示装置等图像形成装置。显示装置3将由通知器60通知的第1辅助信息及第2辅助信息作为影像进行显示,对作业主体100示出。
[0189]
图21是示意地表示实施方式1所涉及的作业辅助装置使显示装置进行显示的第1辅助信息及第2辅助信息的样式的图。在图21中,示出了显示装置3作为第1辅助信息而将图20所示的第m2=1个区间中的实绩区间评价值hv1={hvb1,hvc1}={“正常”,“正常”}和对应的动作名称数据label(hl1)=label(1)=“取出部件a”显示出的情况。
[0190]
在显示装置3显示出的第1辅助信息是如上所述与将传感器数据列x分割出的各区间之中的信赖度rm满足基准的区间所包含的动作相关的信息。即,第1辅助信息是与第2辅助信息相比信赖度rm高的信息。如上所述,第1辅助信息是对与信赖度rm高的区间所包含的动作相关的信息进行累积得到的信息。通过对第1辅助信息进行显示,从而能够进行基于信赖度rm高的信息的作业辅助,能够抑制进行错误的作业辅助。
[0191]
在图21中,显示装置3还作为第2辅助信息而将图15的数据dv4所示的最新的区间即第3个区间中的区间评价值v3={“正常”,“正常”}、与第3个区间相对应的动作名称数据label(l3)=label(3)=“取出部件b”和与第3个区间相对应的第1参考影像数据ref(l3)=ref(3)显示出。此时,如上所述将第1参考影像数据重复播放。
[0192]
此外,在显示装置3显示出的第2辅助信息,是如上所述与将传感器数据列x分割出的各区间之中的仅最新的区间所包含的动作相关的信息。如上所述,作业辅助装置1在由作业主体100刚分别开始循环作业所包含的各动作后,能够由类别数据计算器20对与各个动作相对应的区间及类别编号cm进行推定。即,能够通过第2辅助信息,进行基于快报性高的
信息的作业辅助。
[0193]
显示装置3可以是头戴显示器等装载于身体的方式。另外,也可以取代显示装置3而应用扬声器,也可以是扬声器通过声音对第1辅助信息及第2辅助信息进行通知。示出了作为第2辅助信息将参考影像数据作为2维的视频进行显示的情况,但第2辅助信息并不限定于此,参考影像数据也可以作为静止画面进行显示,也可以作为3维影像进行显示。或者,显示装置3也可以在参考影像数据叠加两手的移动轨迹进行显示。另外,作业辅助装置1也可以包含对将第1参考影像数据与第1辅助信息连结的一系列的动作进行指示的视频。
[0194]
(输入装置4)
[0195]
接下来,对实施方式1所涉及的输入装置4进行说明。输入装置4由鼠标、键盘、触摸面板、存储卡读取装置等能够从外部输入信息的装置构成。实施方式1中的输入装置4将从作业主体100接收到的“动作开始”或者“动作结束”的信号对作业辅助装置1输入。作业辅助装置1在从输入装置4接收到“动作开始”的信号的情况下,开始与“动作开始”的信号相对应的动作。另一方面,作业辅助装置1在从输入装置4接收到“动作结束”的信号的情况下,结束与“动作结束”的信号相对应的动作。实施方式1所涉及的作业辅助装置1按照以上方式进行动作。
[0196]
(流程图)
[0197]
并且,参照流程图对实施方式1所涉及的作业辅助装置1的动作进行说明。图22是表示由实施方式1所涉及的作业辅助装置执行的处理的处理顺序的流程图。
[0198]
传感器数据输入装置10将由传感器2新取得的传感器数据追加至传感器数据存储装置31所存储的传感器数据列x的末尾(步骤s100)。
[0199]
接下来,类别数据计算器20基于由传感器数据存储装置31存储的传感器数据列x和由作业信息存储装置32存储的第1模板gj,对类别数据列s进行计算(步骤s101)。
[0200]
接下来,标准数据确定器30生成顺序数据值,该顺序数据值是表示与由类别数据计算器20计算出的类别数据列s的各区间相对应的标准数据的值(步骤s102)。
[0201]
接下来,区间评价器50关于由类别数据计算器20计算出的类别数据列s所示的各区间,对区间评价值vm进行计算(步骤s103)。
[0202]
接下来,信赖度计算器40关于由类别数据计算器20计算出的类别数据列s所示的各区间,对信赖度rm进行计算(步骤s104)。
[0203]
接下来,信赖度判定器65生成第2辅助信息,通知器60对第2辅助信息进行通知(步骤s105)。
[0204]
接下来,信赖度判定器65向用于对将传感器数据列x分割出的各区间进行识别的编号m代入1(步骤s106)。
[0205]
接下来,信赖度判定器65判定将传感器数据列x分割出的第m个区间中的信赖度rm是否满足基准(步骤s107)。在信赖度rm满足基准的情况下(步骤s107,yes),作业辅助装置1的动作向步骤s108进入。另一方面,在步骤s107中,在信赖度rm不满足基准的情况下(步骤s107,no),作业辅助装置1向步骤s110进入。
[0206]
在信赖度rm满足基准的情况下,信赖度判定器65将信赖度rm满足基准的区间所包含的传感器数据从传感器数据列x去除,对传感器数据列x进行更新(步骤s108)。
[0207]
接下来,信赖度判定器65关于信赖度rm满足基准的区间对实绩数据208进行更新
(步骤s109)。具体地说,信赖度判定器65关于信赖度rm满足基准的区间,对实绩传感器数据列hx、实绩类别数据列hs、实绩顺序数据值hl
m2
及实绩区间评价值hv
m2
进行更新。
[0208]
接下来,信赖度判定器65在m加上1(步骤s110)。而且,信赖度判定器65判定m是否超过类别数据列s所包含的区间的个数m,即是否m>m(步骤s111)。
[0209]
在m没有超过m的情况下(步骤s111,no),作业辅助装置1的动作向步骤s107返回。另一方面,在步骤s111中,在m超过m的情况下(步骤s111,yes),作业辅助装置1的动作向步骤s112进入。
[0210]
在m超过m的情况下,信赖度判定器65将第1辅助信息向显示装置3通知(步骤s112)。
[0211]
接下来,作业辅助装置1对从输入装置4输入的信号进行确认,基于输入的信号而判定动作是否结束(步骤s113)。在从输入装置4没有输入“动作结束”的信号的情况下(步骤s113,no),作业辅助装置1的动作向步骤s100返回。另一方面,在从输入装置4输入“动作结束”的信号的情况下(步骤s113,yes),作业辅助装置1结束动作。
[0212]
(硬件结构)
[0213]
接下来,对实现实施方式1所涉及的作业辅助装置1的硬件结构进行说明。作业辅助装置1中的传感器数据输入装置10、类别数据计算器20、标准数据确定器30、信赖度计算器40、区间评价器50、通知器60及信赖度判定器65的各功能可以通过处理电路而实现。处理电路可以是专用的硬件装置,也可以是执行在存储器中储存的程序的cpu(也称为central processing unit、中央处理装置、处理装置、运算装置、微处理器、微型计算机、处理器、dsp(digital signal processor))等通用装置。另外,传感器数据存储装置31、作业信息存储装置32及作业实绩存储装置34的各功能可以通过存储器实现。
[0214]
在处理电路为专用的硬件装置的情况下,处理电路例如可以是单一电路、复合电路、被程序化的处理器、被并行程序化的处理器、asic(application specific integrated circuit)、fpga(field programmable gate array)或它们的组合。可以将传感器数据输入装置10、类别数据计算器20、标准数据确定器30、信赖度计算器40、区间评价器50、通知器60及信赖度判定器65的各部的功能单独地通过处理电路实现,也可以将各部的功能汇总而通过处理电路实现。
[0215]
在处理电路为cpu的情况下,传感器数据输入装置10、类别数据计算器20、标准数据确定器30、信赖度计算器40、区间评价器50、通知器60及信赖度判定器65的各功能通过软件、固件或软件和固件的组合而实现。软件及固件的至少一者作为程序记述,储存于存储器。处理电路将由存储器存储的程序读出而执行,由此实现各部的功能。这些程序可以使计算机执行传感器数据输入装置10、类别数据计算器20、标准数据确定器30、信赖度计算器40、区间评价器50、通知器60及信赖度判定器65的动作的顺序或者方法。在这里,存储器例如可以是ram(random access memory)、rom(read only memory)、闪存、eprom(erasable programmable rom)、eeprom(注册商标)(electrically erasable programmable rom)等非易失性或易失性的半导体存储器、磁盘、软盘、光盘、压缩盘、迷你盘、dvd(digital versatile disc)等。
[0216]
此外,关于传感器数据输入装置10、类别数据计算器20、标准数据确定器30、信赖度计算器40、区间评价器50、通知器60及信赖度判定器65的各功能,可以将一部分通过专用
的硬件装置实现,将另一部分通过软件或者固件实现。例如,关于传感器数据输入装置10的功能可以由作为专用的硬件装置的处理电路实现,关于类别数据计算器20、标准数据确定器30、信赖度计算器40、区间评价器50、通知器60及信赖度判定器65的各功能,可以由处理电路将在存储器中储存的程序读出并执行而实现。
[0217]
图23是表示实施方式1所涉及的作业辅助装置的硬件结构的第1例的图。在图23中,示出了处理电路1001为专用的硬件装置的情况下的硬件结构例。在图23的例子中,传感器数据输入装置10、类别数据计算器20、标准数据确定器30、信赖度计算器40、区间评价器50、通知器60及信赖度判定器65的各功能通过处理电路1001实现。另外,传感器数据存储装置31、作业信息存储装置32及作业实绩存储装置34的各功能通过存储器1002实现。处理电路1001经由数据总线1003与存储器1002连接。
[0218]
图24是表示实施方式1所涉及的作业辅助装置的硬件结构的第2例的图。在图24中,示出了处理电路为cpu的情况下的硬件结构例。在图24的例子中,传感器数据输入装置10、类别数据计算器20、标准数据确定器30、信赖度计算器40、区间评价器50、通知器60及信赖度判定器65的各功能通过将在存储器1005中储存的程序由处理器1004执行而实现。另外,传感器数据存储装置31、作业信息存储装置32及作业实绩存储装置34的各功能通过存储器1002实现。处理器1004经由数据总线1003与存储器1002及存储器1005连接。此外,在实施方式2、3所涉及的作业辅助装置中,也能够通过与实施方式1所涉及的作业辅助装置1相同的硬件结构而实现。
[0219]
如上所述,根据实施方式1,作业辅助装置1基于针对由作业主体100进行的作业的检测结果而计算出的信赖度rm对第1辅助信息进行通知,因此能够抑制进行错误的作业辅助,能够执行准确的作业辅助。
[0220]
另外,作业辅助装置1将类别数据列sm所示的区间之中的最新的区间所包含的动作的信息作为第2辅助信息进行通知,因此能够进行基于各动作所花费的时间的长短或者各动作的类别的正误的作业辅助。
[0221]
另外,即使在由作业主体100刚分别开始循环作业所包含的各动作后,作业辅助装置1也能够对与各个动作相对应的区间及类别编号cm进行推定,因此能够进行基于快报性高的信息的作业辅助。
[0222]
并且,作业辅助装置1在循环作业中多次实施同一动作的情况下,也能够对与各个动作相对应的顺序进行确定,因此能够执行准确的作业辅助。
[0223]
实施方式2
[0224]
接下来,使用图25至图28对实施方式2进行说明。由作业主体100实施的循环作业的长度越短则生产率越高,越长则生产率越低。如上所述,循环作业的长度与生产率之间的相关性强,在作业辅助中成为重要的信息。另外,在由作业主体100实施的循环作业中,有时必须实施的作业被遗漏。如上所述的作业的遗漏与生产的品质相关,因此在作业辅助中成为重要的信息。
[0225]
实施方式2所涉及的作业辅助装置对由作业主体100实施的循环作业的长度及作业的遗漏进行确定,由此对生产率提高进行辅助,并且抑制作业的品质降低。
[0226]
(作业辅助装置1a)
[0227]
图25是表示实施方式2所涉及的作业辅助装置的结构的一个例子的图。对图25的
各结构要素之中的具有与图1所示的实施方式1的作业辅助装置1同一功能的结构要素标注同一标号,省略重复的说明。
[0228]
实施方式2所涉及的作业辅助装置1a与实施方式1所涉及的作业辅助装置1的不同点在于,针对由通过作业主体100实施的一系列的多个动作构成的多次循环作业,能够对循环作业的长度及作业的遗漏进行确定。
[0229]
作业辅助装置1a取代通知器60而是具有通知器60a。作业辅助装置1a与实施方式1所涉及的作业辅助装置1相比较,除了新具有循环评价器70以外,通知器60a的动作的一部分与通知器60的动作不同。通过如上所述的结构及动作,作业辅助装置1a针对由通过作业主体100实施的一系列的多个动作构成的多次循环作业,能够容易地对循环作业的长度及作业的遗漏进行确定。下面,关于作业辅助装置1a,以与实施方式1所涉及的作业辅助装置1的差异点为中心进行说明。
[0230]
(循环评价器70)
[0231]
对实施方式2所涉及的循环评价器70进行说明。循环评价器70基于由作业实绩存储装置34存储的实绩顺序数据值hl
m2
及在作业信息存储装置32中存储的标准数据列std(lm),对由作业主体100实施的循环作业的长度及作业的遗漏进行检测。循环评价器70使检测结果存储于作业实绩存储装置34。
[0232]
(循环评价器70:循环作业的长度)
[0233]
循环评价器70通过以下的式(6)及式(7)所示的判定式,针对将实绩传感器数据列hx分割出的第1个至第m2个为止的全部区间,进行实绩顺序数据值hl
m2
的判定。
[0234]
【式6】
[0235]
m2=1或者hl
m2
>hl
m2-1
ꢀꢀꢀ…
(6)
[0236]
【式7】
[0237]
m2=m2或者hl
m2
>hl
m2+1
ꢀꢀꢀ…
(7)
[0238]
m2是将实绩传感器数据列hx分割出的区间的个数。m2是用于对实绩传感器数据列hx的多个区间各自进行识别的编号,是实绩传感器数据列hx中的多个区间的顺序。循环评价器70在第m2个区间中满足式(6)所示的判定式的情况下,将m2追加至循环作业的起始区间cvhead。
[0239]
另外,循环评价器70在第m2个区间中满足式(7)所示的判定式的情况下,将m2追加至循环作业的末尾区间cvtail。在这里,cvhead={cvhead(1),cvhead(2),
…
,cvhead(d)}。cvhead(d)表示由作业主体100实施的第d个循环作业的起始区间。cvtail={cvtail(1),cvtail(2),
…
,cvtail(d)}。cvtail(d)表示由作业主体100实施的第d个循环作业的末尾区间。d是用于对由作业主体100实施的多个循环作业进行识别的编号,是1至d为止的整数。d是由作业主体100实施的多个循环作业的顺序。d是由作业主体100实施的循环作业的次数。
[0240]
循环评价器70还对循环作业的长度cvlen进行检测。cvlen={cvlen(1),cvlen(2),
…
,cvlen(d)}。cvlen(d)是由作业主体100实施的第d个循环作业的长度,循环评价器70能够通过式(8)对cvlen(d)进行计算。
[0241]
【式8】
[0242]
cvlen(d)=ha
cvtail(d)
+hb
cvtail(d)-ha
cvhead(d)
ꢀꢀ…
(8)
[0243]
(循环评价器70:作业的遗漏)
[0244]
循环评价器70接下来对各个循环作业所包含的实绩顺序数据值hl
m2
的系列中不包含的标准数据的编号进行检测而作为作业的遗漏。更具体地进行说明。循环评价器70对作业的遗漏进行检测的方法在d<d的第d个循环作业和第d个循环作业中不同。
[0245]
由作业主体100实施的第d个循环作业所包含的顺序数据值的系列hld={hl
cvhead(d)
,hl
cvhead(d)+1
,
…
,hl
cvtail(d)
}。d<d的第d个循环作业是作业主体100实施结束后的循环作业。即,d<d的第d个循环作业需要包含与标准数据列std(lm)所包含的第1个至第f个为止的全部标准数据相对应的动作。与上述同样地,f是标准数据的个数。即,循环评价器70针对hld,对是否分别包含1至f为止的值进行评价,在不包含的值f存在的情况下,对与第f个标准数据相对应的动作遗漏进行检测。此时,循环评价器70在由作业主体100实施的第d个循环作业中的作业的遗漏cvmiss(d)追加动作名称数据label(f)。
[0246]
另外,第d个循环作业是由作业主体100正在实施的循环作业。即,第d个循环作业需要实施标准数据列std(lm)所包含的第1个至第hl
cvtail(d)
个为止的动作。因此,循环评价器70针对hld,对是否包含1至hl
cvtail(d)
为止的值进行评价,在不包含的值f存在的情况下,对与第f个标准数据相对应的动作遗漏进行检测。此时,循环评价器70在由作业主体100实施的第d个循环作业中的作业的遗漏cvmiss(d)追加动作名称数据label(f)。
[0247]
图26是用于对由实施方式2所涉及的作业辅助装置所具有的作业实绩存储装置存储的实绩数据的数据构造进行说明的图。如图26所示,在由作业实绩存储装置34存储的实绩数据209中,包含有实绩类别数据列hs
m2
、实绩顺序数据值hl
m2
及实绩区间评价值hv
m2
。
[0248]
图27是用于对由实施方式2所涉及的作业辅助装置所具有的循环评价器检测出的检测结果数据的数据构造进行说明的图。在检测结果数据210中,包含有由循环评价器70进行检测的循环作业的起始区间、循环作业的末尾区间、循环作业的长度和遗漏的作业的种类。即,在检测结果数据210中,将循环作业的起始区间cvhead(d)、循环作业的末尾区间cvtail(d)、循环作业的长度cvlen(d)和作业的遗漏cvmiss(d)相关联。
[0249]
根据式(6),在第1个区间及第11个区间中满足判定式,因此循环评价器70对循环作业的起始区间cvhead={1,11}进行检测。另外,根据图26所示的实绩数据209,实绩类别数据列hs
m2
所包含的区间的个数m2=12。此时,根据式(7),在第10个区间及第12个区间中满足判定式。由此,循环评价器70对cvtail={10,12}进行检测。另外,循环评价器70通过式(8)对循环作业的长度cvlen={82,13}进行检测。
[0250]
与上述同样地,设为标准数据的个数f=10。另外,循环作业的次数d=2。d<d的第d=1个循环作业中的循环作业的起始区间cvhead(1)=1、末尾区间cvtail(1)=10。由此,循环评价器70针对第1个循环作业所包含的实绩顺序数据值hl
m2
的系列hl1={1,2,3,4,5,6,8,na,9,10},对是否包含1至10为止的值进行评价,检测到不包含7。在该情况下,循环评价器70参照图7,动作名称数据label(7)=“螺钉紧固部件c”。由此,循环评价器70对循环作业1中的作业的遗漏cvmiss(1)={“螺钉紧固部件c”}进行检测。
[0251]
另外,第d=2个循环作业中的循环作业的起始区间cvhead(2)=11、末尾区间cvtail(2)=12。由此,循环评价器70针对hl2={hl
11
,hl
12
}={2,3},对是否包含1至3为止的值进行评价,检测到不包含1。此时,根据图7,动作名称数据label(1)=“取出部件a”。在该情况下,循环评价器70对循环作业2中的作业的遗漏cvmiss(2)={“取出部件a”}进行检测。
[0252]
循环评价器70使检测出的信息存储于作业实绩存储装置34。循环评价器70在作业
实绩存储装置34中存储的信息是检测结果数据210,该检测结果数据210包含有循环作业的起始区间cvhead、循环作业的末尾区间cvtail、循环作业的长度cvlen和作业的遗漏cvmiss。信赖度判定器65基于由循环评价器70在作业实绩存储装置34中存储的检测结果数据210,生成第1辅助信息。
[0253]
(通知器60a)
[0254]
接下来,对实施方式2中的通知器60a进行说明。通知器60a在通知器60的输出的基础上,还作为第1辅助信息而将循环作业的起始区间cvhead、循环作业的末尾区间cvtail、循环作业的长度cvlen、作业的遗漏cvmiss输出至显示装置3。
[0255]
由此,作业辅助装置1a能够执行基于各循环作业所花费的时间、或者各循环作业中的作业的遗漏的作业辅助。
[0256]
图28是示意地表示实施方式2所涉及的作业辅助装置使显示装置进行显示的第1辅助信息的样式的图。在图28中,示出了显示装置3作为第1辅助信息,与图21所示的第1辅助信息和用于对循环作业进行识别的编号d相关联,将循环作业的长度通过秒单位示出的值cvlen(d)[sec]和表示遗漏的作业的种类的作业的遗漏cvmiss(d)显示出的情况。
[0257]
在实施方式2中,作业辅助装置1a每隔200毫秒而取得传感器数据,因此作业辅助装置1a在作业的长度cvlen(d)乘以0.2秒,由此能够对cvlen(d)[sec]进行计算。作业主体100对在显示装置3显示出的第1辅助信息进行确认,由此能够容易地掌握实施几次循环作业、1次循环中花费何种程度的时间或者在各个循环中是否有作业的遗漏。
[0258]
如上所述,根据实施方式2,作业辅助装置1a基于各区间的实绩顺序数据值hl
m2
,判定循环作业的起始区间cvhead及循环作业的末尾区间cvtail,因此能够对由作业主体100实施的循环作业的长度进行确定。另外,作业辅助装置1a对循环作业所包含的实绩顺序数据值hl
m2
的系列中不包含的标准数据的编号,即,实绩顺序数据值hl
m2
进行检测而作为作业的遗漏。由此,作业辅助装置1a能够对由作业主体100实施的循环作业的长度及作业的遗漏进行确定而进行通知,因此能够对生产率提高进行辅助,并且抑制作业的品质降低。
[0259]
实施方式3
[0260]
接下来,使用图26、图29及图30对实施方式3进行说明。在作业主体100例如为人的情况下,作业主体100有时一边实施作业、一边改善作业,改变手的动作方式,或改变工具的放置位置。如上所述,在由作业主体100实施的循环作业发生历时变化的情况下,有时不与由作业信息存储装置32存储的信息匹配,作业辅助的性能劣化。
[0261]
具体地说,在循环作业发生历时变化的情况下,例如,由作业主体100实施的循环作业所包含的一系列的多个动作不与第1模板gj匹配,类别数据的计算精度劣化。另外,在循环作业发生历时变化的情况下,由作业主体100实施的循环作业的内容不与参考影像数据的内容匹配,难以成为循环作业的参考。为了解决这些问题,需要将由作业信息存储装置32存储的信息以与现状的循环作业匹配的方式进行更新,但在通过人手实施的情况下,会花费大量工时。
[0262]
实施方式3所涉及的作业辅助装置,在由作业主体100实施的作业的动作发生历时变化的情况下,也能够自动地更新由作业信息存储装置32存储的信息,由此不需要人手,就能够维持作业辅助的性能。
[0263]
(作业辅助装置1b)
[0264]
图29是表示实施方式3所涉及的作业辅助装置的结构的一个例子的图。对图29的各结构要素之中的具有与图25所示的实施方式2的作业辅助装置1a同一功能的结构要素标注同一标号,省略重复的说明。
[0265]
实施方式3所涉及的作业辅助装置1b与实施方式2所涉及的作业辅助装置1a的不同点在于,针对由通过作业主体100实施的一系列的多个动作构成的多次循环作业,基于由作业实绩存储装置34b存储的信息,能够对由作业信息存储装置32存储的信息进行更新。
[0266]
作业辅助装置1b取代信赖度判定器65而是具有信赖度判定器65b,取代作业实绩存储装置34而是具有作业实绩存储装置34b。作业辅助装置1b与实施方式2所涉及的作业辅助装置1a相比较,除了新具有更新器80以外,信赖度判定器65b的动作的一部分与信赖度判定器65的动作不同。另外,作业辅助装置1b与作业辅助装置1a相比较,由作业实绩存储装置34b存储的数据的一部分与由作业实绩存储装置34存储的数据不同,另外,新连接照相机5。通过如上所述的结构及动作,作业辅助装置1b针对由通过作业主体100实施的一系列的多个动作构成的多次循环作业,能够容易地对由作业信息存储装置32存储的信息进行更新。下面,关于作业辅助装置1b,以与实施方式2所涉及的作业辅助装置1a的差异为中心进行说明。
[0267]
更新器80与作业信息存储装置32及作业实绩存储装置34b连接。更新器80对由作业信息存储装置32存储的信息进行更新。关于更新器80的详细内容在后面记述。
[0268]
图30是对实施方式3所涉及的作业辅助装置的使用例进行说明的图。在实施方式3中,作业主体100遍及多次而反复地实施由一系列的多个动作构成的作业即循环作业。
[0269]
(照相机5)
[0270]
照相机5将通过对由作业主体100实施的循环作业进行拍摄所取得的图像输出至作业辅助装置1b。
[0271]
(信赖度判定器65b)
[0272]
接下来,对实施方式3所涉及的作业辅助装置1b所具有的信赖度判定器65b进行说明。信赖度判定器65b在由信赖度判定器65执行的处理的基础上,在信赖度rm满足基准的区间中,使由照相机5取得的一系列的图像作为实绩影像数据而存储于作业实绩存储装置34b。
[0273]
(更新器80)
[0274]
接下来,对实施方式3所涉及的更新器80进行说明。更新器80基于由作业实绩存储装置34b存储的动作的实绩的信息,对由作业信息存储装置32存储的信息进行更新。
[0275]
(更新器80:第2模板)
[0276]
更新器80基于由作业实绩存储装置34b存储的实绩传感器数据列hx和实绩类别数据列hs,针对各个类别而生成第2模板g2j。在这里,j是用于对多个类别进行识别的编号,是1至j为止的整数。j是类别的个数,即,第2模板g2j的个数。
[0277]
在实施方式3中,更新器80使用高斯过程回归,由此作为由各时刻的传感器数据的高斯分布构成的集合而生成第2模板g2j。第2模板g2j={g2j(1),g2j(2),
…
,g2j(l)}。g2j(i)是分类为类别j的区间中的第i个传感器数据的高斯分布的参数,g2j(i)={μ2j(i),σ2
j2
(i)}。在这里,μ2j(i)是高斯分布的平均,σ2
j2
(i)是高斯分布的方差。另外,l是第2模板g2j的长度,即,示出将实绩传感器数据列hx分割出的各区间所包含的传感器数据的个数的最
大值。第1模板gj和第2模板g2j是同一长度。
[0278]
对实施方式3所涉及的第2模板g2j更具体地进行说明。如上所述,μ2j(i)是分类为类别j的区间中的第i个传感器数据的高斯分布的平均。μ2j(i)与传感器数据同样地,是2维的值。另外,σ2
j2
(i)是分类为类别j的区间中的第i个传感器数据的高斯分布的方差。在实施方式3中,传感器数据的高斯分布的方差在任意的维度中也假定成为相同。因此,σ2
j2
(i)是1维的值。
[0279]
第2模板g2j使用通过实绩类别数据列hs分类为类别j的区间中的传感器数据的集合xj和在通过实绩类别数据列hs分类为类别j的区间中将传感器数据输出的编号的集合ij能够进行推定。在这里,xj={xj(1),xj(2),
…
,xj(n3j)},ij={ij(1),ij(2),
…
,ij(n3j)}。例如,xj(1)是在分类为类别j的区间中第ij(1)个输出的传感器数据。
[0280]
另外,n3j是集合xj及ij所包含的要素的个数。即,n3j是将实绩传感器数据列hx分割出的区间之中的与类别j分类的区间所包含的传感器数据的个数之和。在实施方式3中,更新器80使用以下的式(9)及式(10),对第2模板g2j(i)={μ2j(i),σ2
j2
(i)}进行推定。
[0281]
【式9】
[0282]
μ2j(i)=v
j,it
(kj+β-1
e)-1
xjꢀꢀ…
(9)
[0283]
【式10】
[0284][0285]
在这里,β表示特定的参数,e表示单位矩阵。另外,kj是通过以下的式(11)计算的矩阵,v
j,i
是通过以下的式(12)计算的矢量。另外,k是内核函数,能够利用以下的式(13)所示的高斯内核。θ0、θ1、θ2、θ3是内核函数k中的特定的参数。
[0286]
【式11】
[0287][0288]
【式12】
[0289][0290]
【式13】
[0291][0292]
(更新器80:第2类别转换概率)
[0293]
实施方式3所涉及的更新器80还基于由作业实绩存储装置34b存储的实绩类别数据列hs,生成类别转换的概率即第2类别转换概率p2(j|j’)。更新器80通过以下的式(14)对第2类别转换概率进行计算。在这里,n4
j’,j
是在实绩类别数据列hs中,第m2个区间中的类别编号成为类别编号c2
m2
=j’,且第m2+1个区间中的类别编号成为类别编号c2
m2+1
=j的次数。另外,n5
j’是在实绩类别数据列hs中类别编号成为j的次数。γ是特定的参数。
[0294]
【式14】
[0295]
p2(j|j
′
)=(n4j′
,j
+γ)/(n5j′
+jγ)
ꢀꢀ…
(14)
[0296]
(更新器80:第2参考影像数据)
[0297]
实施方式3所涉及的更新器80还基于由作业实绩存储装置34b存储的实绩影像数据,生成对循环作业所包含的第f个动作进行指示的影像即第2参考影像数据ref2(f)。f是如上所述用于对多个标准数据进行识别的编号,是1至f为止的整数。f是如上所述循环作业所包含的标准数据的个数,是事先设计的动作的个数。对第2类别转换概率进行更新的更新器80是第1更新器,对第2参考影像数据进行更新的更新器80是第2更新器。
[0298]
在这里,使用图26,对通过更新器80实施的更新处理详细地进行说明。在这里,对由更新器80例如生成f=2的第2参考影像数据ref2(2)的方法进行说明。
[0299]
更新器80,首先对实绩顺序数据值hl
m2
=f、且hvb
m2
=“正常”、且hvc
m2
=“正常”的第m2个区间进行计算。根据图26的例子,更新器80对第2个区间及第11个区间进行计算。更新器80接下来,根据计算出的多个区间,对区间的长度hb
m2
成为最小的区间进行计算。根据图26的例子,m2=2的区间的长度hb2=8,m2=11的区间的长度hb
11
=7,因此对m2=11进行计算。更新器80接下来,基于计算的第m2个区间中的开始编号ha
m2
、区间的长度hb
m2
,根据由作业实绩存储装置34b存储的实绩影像数据而生成第2参考影像数据ref2(f)。根据图26的例子,区间m2=11中的开始编号ha
11
=83,区间的长度hb
11
=7。实绩类别数据列hs针对每隔200毫秒取得的传感器数据列x进行计算,因此,更新器80从参考影像数据的开头起83
×
0.2=16.6秒,生成长度7
×
0.2=1.4秒的区间而作为f=2的第2参考影像数据ref2(2)。
[0300]
(更新器80:更新)
[0301]
由更新器80生成的第2模板g2j的数据构造与由作业信息存储装置32存储的第1模板gj的数据构造相同。另外,由更新器80生成的第2类别转换概率的数据构造与由作业信息存储装置32存储的第1类别转换概率的数据构造相同。
[0302]
更新器80还通过第2模板g2j对由作业信息存储装置32存储的第1模板gj进行更新。更新器80还通过第2类别转换概率对由作业信息存储装置32存储的第1类别转换概率进行更新。更新器80还通过第2参考影像数据对由作业信息存储装置32存储的第1参考影像数据进行更新。
[0303]
如上所述,在实施方式3中,作业辅助装置1b基于由作业实绩存储装置34b存储的数据,生成新的模板即第2模板g2j、新的类别转换概率即第2类别转换概率和新的参考影像数据即第2参考影像数据。由此,在由作业主体100实施的循环作业发生历时变化的情况下,也能够通过生成的数据自动更新由作业信息存储装置32存储的数据,因此不耗费人力,就能够维持作为作业辅助装置1b的性能。
[0304]
(变形例)
[0305]
此外,上述实施方式1至3也能够应用于除了作业主体100为人以外的情况。例如,在作业主体100为作业机器人、工作机械这样的机械的情况下,作业的分析者能够在异常刚发生后掌握循环作业中的异常的发生这样的信息和信赖度rm,因此,实施方式1至3的应用变得有效。
[0306]
另外,实施方式1至3所涉及的第1辅助信息可以包含有信赖度rm满足基准的区间中的实绩影像数据。另外,实施方式1至3所涉及的第1辅助信息可以是对与具有同一实绩顺
序数据值hl
m2
的各区间相对应的多个实绩影像数据同时进行播放的信息。
[0307]
另外,作业信息存储装置32作为由各时刻的传感器数据的高斯分布构成的集合对第1模板gj进行存储,但也可以取代高斯分布,而是使用其他适当的概率分布。
[0308]
另外,更新器80作为由各时刻的传感器数据的高斯分布构成的集合而生成第2模板g2j,但也可以取代高斯分布而使用其他适当的概率分布。
[0309]
另外,传感器数据输入装置10也可以取代与传感器2连接,而是具有能够装卸的存储介质的读取装置。由此,传感器数据输入装置10取代取得由传感器2检测出的实时的传感器数据列x,能够从存储介质读出在过去测定出的传感器数据列x。
[0310]
另外,区间评价器50在将传感器数据列x分割出的各区间的长度相对于各自对应的标准长度短的情况下,可以评价为“异常”。另外,区间评价器50在对将传感器数据列x分割出的各区间所包含的传感器数据和对应的第1模板gj进行比较的相似度低的情况下,可以评价为“异常”。另外,实施方式3中说明的更新器80可以应用于实施方式1的作业辅助装置1。
[0311]
以上的实施方式所示的结构表示一个例子,也能够与其他公知技术组合,也能够将实施方式彼此组合,在不脱离主旨的范围也能够将结构的一部分省略、变更。
[0312]
标号的说明
[0313]
1、1a、1b作业辅助装置,2传感器,3显示装置,4输入装置,5照相机,10传感器数据输入装置,20类别数据计算器,30标准数据确定器,31传感器数据存储装置,32作业信息存储装置,34、34b作业实绩存储装置,40信赖度计算器,50区间评价器,60、60a通知器,65、65b信赖度判定器,70循环评价器,80更新器,100作业主体,101左手,102右手,201、203时序图形,202类别数据列,204~207对应数据组,208、209实绩数据,210检测结果数据,1001处理电路,1002、1005存储器,1003数据总线,1004处理器,cd1~cd4类别数据,dj1~dj4、dl1~dl4、dr1~dr4、dv1~dv4数据,g1~g4、ga1~ga4、gta(1)~gta(10)、gtb(1)~gtb(10)时序图形,sd1~sd4传感器数据列。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1