一种基于知识蒸馏技术的智能异物检测方法与流程
1.本发明涉及智能异物检测领域,特别涉及一种基于知识蒸馏技术的智能异物检测方法。
背景技术:
2.由于我国港口货物装卸的智慧化建设尚处于起步状态,特别是在大数据应用、云计算、物联网技术融合方面的研究基础薄弱、应用水平较低,企业对智能化的理解和认知也比较欠缺,行车装备智能巡检机器人采用人工智能领域中先进的机器视觉、光电子与激光、图像处理、模式识别、目标检测与视觉场景建模分析等技术,建成全方位立体化的综合智能监测与保护系统,对行车轨道异物、超温、跑偏、烟雾与粉尘、场地错位人员等能及时检测识别,可以对各种安全隐患进行提前预判和预警联动控制,而其中轨道深度视觉的智能异物检测尤其重要。
3.轨道深度视觉的智能异物检测中的关键技术包括深度学习的目标检测算法、深度学习网络的注意力机制以及深度学习模型轻量化算法,在传统的深度学习目标检测算法中只使用传统机械设备进行检测,缺乏对工业场景的特殊考虑,忽略了背景复杂对模型的影响,本项目为解决这一难题,提出了利用非局部像素注意力机制,通过全局上下文过滤背景噪声,此外,传统算法不具备处理工业设备在运动条件下的实时检测,因此本项目首先为解决运动下检测的偏差,研究级联检测头来缓解抖动对检测精度带来的影响,此外本项目为了提高实时性检测,研究知识蒸馏方法来实现模型的轻量化。
技术实现要素:
4.本发明的目的在于提供一种基于知识蒸馏技术的智能异物检测方法,以解决上述背景技术中提出的问题。
5.为实现上述目的,本发明提供如下技术方案:一种基于知识蒸馏技术的智能异物检测方法,包括以下具体使用步骤:
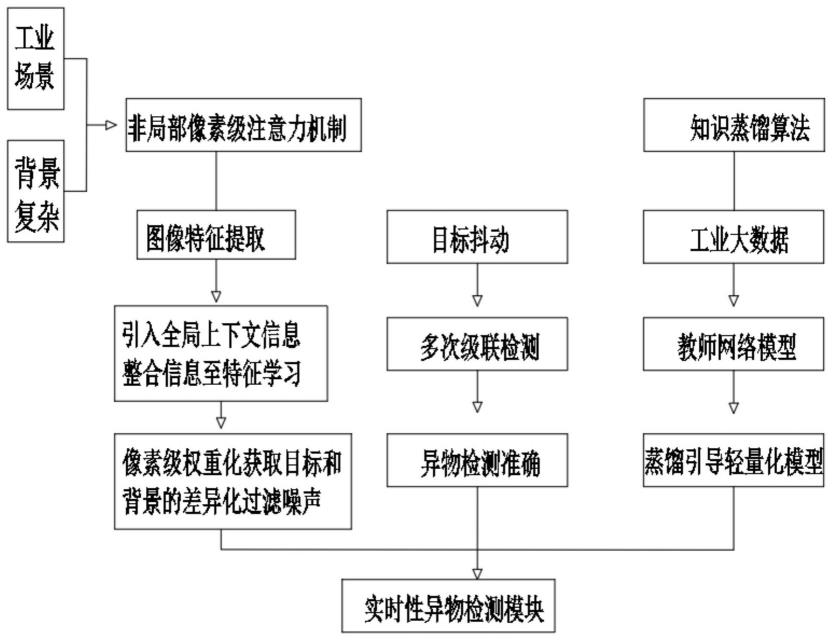
6.步骤一:研究非局部像素级注意力,提取图像特征,引入全局上下文信息,并整合这些信息到特征学习中,像素级的权重化获取目标,分析背景的差异化,过滤背景噪音;
7.步骤二:设计级联检测头部,在目标抖动的情况下,进行多次级联检测,缓解搭载摄像头的抖动;
8.步骤三:工业大数据设计精度更高的教师网络模型,蒸馏引导轻量化模型的学习;
9.步骤四:利用上述实现实时性异物检测,对进行轻量化设计,实现实时异物、行人的危险检测报警系统。
10.优选的,智能视觉系统包含视觉传感器、传输和智能分析三个部分,实时性异物检测报警系统包含实时异物检测模块和报警模块。
11.优选的,实时性异物检测报警系统通过人工智能算法、场景深度视觉层面解析及轻量化检测模型组成。
12.优选的,像素级权重化获取目标和背景的差异化过滤噪音结合有像素级注意力过滤背景噪声和全局上下文区分目标。
13.优选的,多次级联检测结合有搭载摄像头设备的运动,通过多组运动实验检测达到检测异物准确性能。
14.优选的,轻量化模型包含有教师网络模型中的知识迁移及大数据有效信息。
15.本发明的技术效果和优点:
16.本发明在传统机械设备上搭载深度摄像头构建智能视觉系统,实现设备的实时异物检测,在工业特定场景下利用人工智能算法对场景进行深度视觉层面解析,构造轻量化检测模型实现实时异物、行人的危险检测报警系统,通过研究非局部像素级注意力机制,解决过滤背景噪声,通过设计级联检测头来缓解搭载摄像头设备抖动影响,研究知识蒸馏算法构建轻量化模型,最终为构建实时异物检测系统。
附图说明
17.图1为本发明实施例实时性异物检测模块工作流程图。
18.图2为本发明轨道深度视觉智能异物检测框架图。
19.图3为本发明人工智能算法工作框架图。
具体实施方式
20.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
21.本发明提供了如图1-3所示的一种基于知识蒸馏技术的智能异物检测方法,流程如图所示,包括:
22.首先对于工业复杂环境下,为缓解环境对模型检测产生的干扰,研究基于非局部像素级注意力机制,通过对图像特征提取阶段引入全局上下文信息,并整合这些信息到特征学习中,通过像素级的权重化获取目标和背景的差异化特征,并用像素级注意力过滤背景噪声,实现无干扰的实时性异物检测环形;
23.此外为解决搭载摄像头设备的运动性,设计级联检测头部,可以在目标抖动的情况下,进行多次级联检测提高检测异物的准确性,缓解搭载摄像头的抖动;
24.研究知识蒸馏算法,通过工业大数据设计精度更高的教师网络模型,通过蒸馏引导轻量化模型的学习,达到轻量、准确地检测异物,最终为实现实时性异物检测,对模型进行轻量化设计,使实时性异物检测模块能实现实时异物、行人的危险检测,通过报警模块实现异物提醒,可以有效的缩短突发事件响应时间,提高报警系统的精确度,实现安全隐患的闭环处理与消除;
25.轨道深度视觉的智能异物检测中的关键技术包括深度学习的目标检测算法、深度学习网络的注意力机制以及深度学习模型轻量化算法,深度学习目标检测算法中包含了传统机械设备检测和搭载深度摄像头,联合智能视觉系统,便于实时性异物检测系统的异物检测,智能视觉系统包含视觉传感器、传输和智能分析三个部分,实时性异物检测报警系统
包含实时异物检测模块和报警模块,实时性异物检测报警系统通过人工智能算法、场景深度视觉层面解析及轻量化检测模型组成,便于在工业特定场景下利用人工智能算法对场景进行深度视觉层面解析,构造轻量化检测模型实现实时异物、行人的危险检测报警系统,像素级权重化获取目标和背景的差异化过滤噪音结合有像素级注意力过滤背景噪声和全局上下文区分目标,多次级联检测结合有搭载摄像头设备的运动,在搭载摄像头设备中目标抖动时,通过多组运动实验检测达到检测异物准确性能,轻量化模型包含有教师网络模型中的知识迁移及大数据有效信息,通过蒸馏引导及构建轻量化模型,提高实时性检测效率。
26.本发明工作原理:
27.首先对于工业复杂环境下,为缓解环境对模型检测产生的干扰,研究非局部像素级注意力机制,利用全局上下文区分目标与背景并用像素级注意力过滤背景噪声,此外,为解决搭载摄像头设备的运动性,设计级联检测头来缓解抖动为模型性能带来的影响。最终为构建实时异物检测系统,研究知识蒸馏算法构建轻量化模型。
28.最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
技术特征:
1.一种基于知识蒸馏技术的智能异物检测方法,其特征在于,包括以下具体使用步骤:步骤一:研究非局部像素级注意力,提取图像特征,引入全局上下文信息,并整合这些信息到特征学习中,像素级的权重化获取目标,分析背景的差异化,过滤背景噪音;步骤二:设计级联检测头部,在目标抖动的情况下,进行多次级联检测,缓解搭载摄像头的抖动;步骤三:工业大数据设计精度更高的教师网络模型,蒸馏引导轻量化模型的学习;步骤四:利用上述实现实时性异物检测,对进行轻量化设计,实现实时异物、行人的危险检测报警系统。2.根据权利要求1所述的一种基于知识蒸馏技术的智能异物检测方法,其特征在于,智能视觉系统包含视觉传感器、传输和智能分析三个部分,实时性异物检测报警系统包含实时异物检测模块和报警模块。3.根据权利要求1所述的一种基于知识蒸馏技术的智能异物检测方法,其特征在于,实时性异物检测报警系统通过人工智能算法、场景深度视觉层面解析及轻量化检测模型组成。4.根据权利要求1所述的一种基于知识蒸馏技术的智能异物检测方法,其特征在于,像素级权重化获取目标和背景的差异化过滤噪音结合有像素级注意力过滤背景噪声和全局上下文区分目标。5.根据权利要求1所述的一种基于知识蒸馏技术的智能异物检测方法,其特征在于,多次级联检测结合有搭载摄像头设备的运动,通过多组运动实验检测达到检测异物准确性能。6.根据权利要求1所述的一种基于知识蒸馏技术的智能异物检测方法,其特征在于,轻量化模型包含有教师网络模型中的知识迁移及大数据有效信息。
技术总结
本发明公开了一种基于知识蒸馏技术的智能异物检测方法,包括研究非局部像素级注意力,提取图像特征,引入全局上下文信息,并整合这些信息到特征学习中,像素级的权重化获取目标,分析背景的差异化,过滤背景噪音,设计级联检测头部,在目标抖动的情况下,进行多次级联检测,缓解搭载摄像头的抖动,工业大数据设计精度更高的教师网络模型,蒸馏引导轻量化模型的学习,对进行轻量化设计。本发明在传统机械设备上搭载深度摄像头构建智能视觉系统,实现设备的实时异物检测,在工业特定场景下利用人工智能算法对场景进行深度视觉层面解析,构造轻量化检测模型实现实时异物、行人的危险检测报警系统。报警系统。
技术研发人员:夏战国 金鑫
受保护的技术使用者:苏州神马精工科技有限公司
技术研发日:2021.09.01
技术公布日:2023/3/6
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1