智能测量方法、智能测量系统、电子设备及存储介质与流程
本发明涉及数据测量模块,特别涉及一种智能测量方法、智能测量系统、电子设备及存储介质。
背景技术:
1、对待检测对象进行测量是研究待检测对象的特征的方法,具体而言,如果待检测对象为人体,则对人体进行测量是研究人体的体格特征的方法,通过测量人体各部位尺寸来确定个体之间或群体之间差异,也是在医学上判断人体正常发育的重要指标。
2、目前在对待检测对象进行测量,如对人体进行测量的方法主要分为传统物理方法和自动方法。传统物理方法包括传统人体测量仪器(如人体测高仪、人体测量用直角规和弯角规等)和专门用途测量仪器(如全髋关节置换术中下肢长度测量仪)。这些工具具有较好的准确度,但是也存在无法忽略的缺点,如测量速度慢,需要工具操作人员具备相应医学知识并对其进行工具使用培训。
3、自动方法包括物理自动方法(对创痛物理方法进行改进,加入自动装置,如身高测量仪中标记头顶的横杆无须人员拖动,通过电路控制电机带动移动至头顶)和传感器自动方法(通过固定相机等到人体确定位置采集图像或其它信号处理后获得相关测量数据,如自动人体测量高度装置在人体正面和侧面安装摄像头拍摄图像,再通过摄像机与人体距离计算人体身高)。这些自动方法减少了工作人员干预,同样存在一些缺点,如物理自动方法依然需要和人体接触,同时效率依然较低;传感器自动方法解决了上述问题,但是测量内容往往比较单一,准确度也有待考证。
技术实现思路
1、本发明要解决的技术问题是为了克服现有技术中在不与待检测对象接触的情况下,难以准确高效地对待检测对象进行测量的缺陷,提供一种在不与待检测对象接触的情况下可以准确高效地待检测对象进行测量的智能测量方法、智能测量系统、电子设备及存储介质。
2、本发明是通过下述技术方案来解决上述技术问题:
3、本发明提供了一种智能测量方法,所述智能测量方法包括:
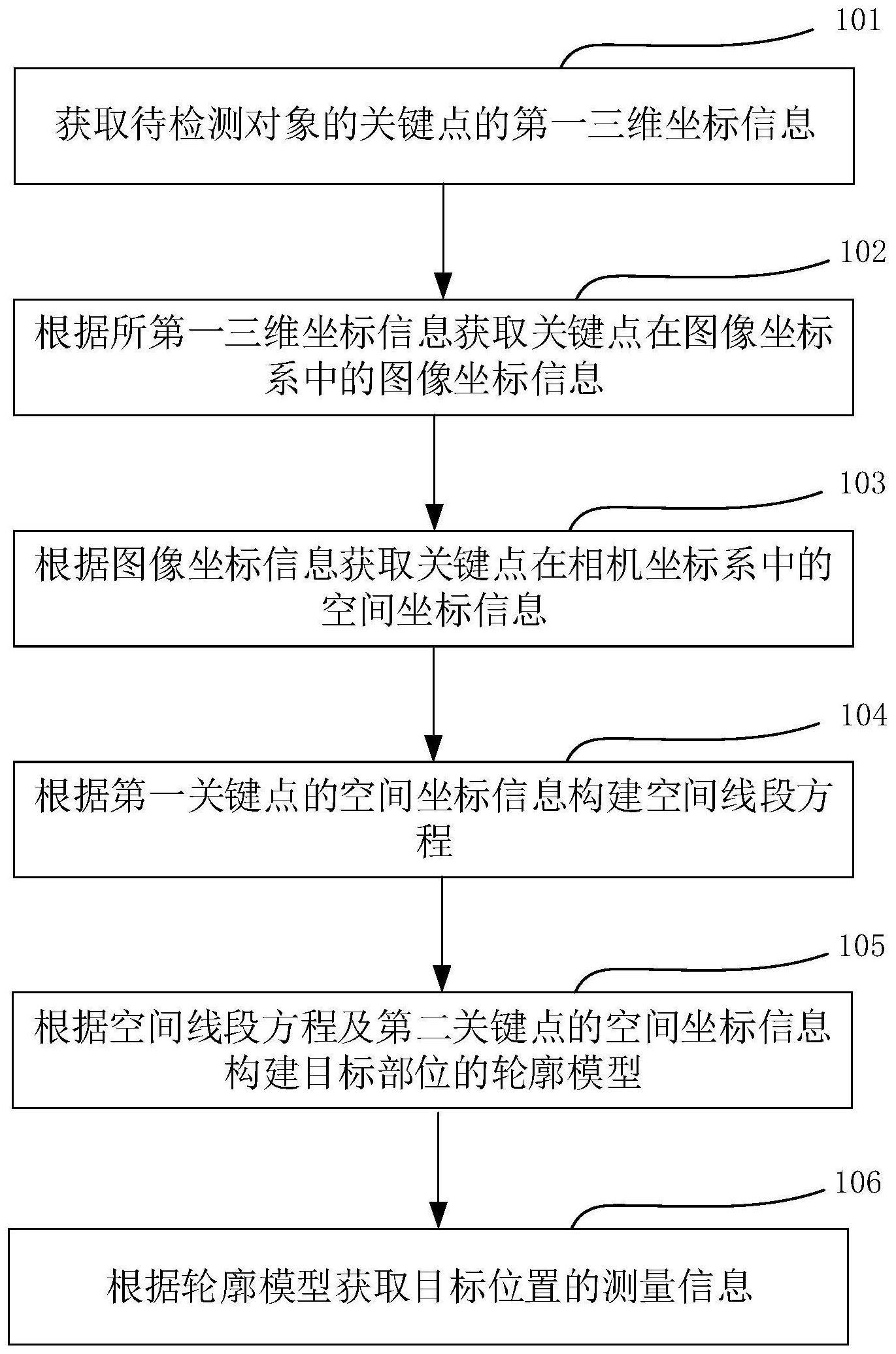
4、获取待检测对象的关键点的第一三维坐标信息,所述待检测对象包括目标部位,所述关键点包括第一关键点及第二关键点,所述第一关键点为所述目标部位的两端的关键点,所述第二关键点为所述目标部位的边缘的关键点;
5、根据所第一三维坐标信息获取所述关键点在图像坐标系中的图像坐标信息;
6、根据所述图像坐标信息获取所述关键点在相机坐标系中的空间坐标信息;
7、根据所述第一关键点的空间坐标信息构建空间线段方程;
8、根据所述空间线段方程及所述第二关键点的空间坐标信息构建所述目标部位的轮廓模型;
9、根据所述轮廓模型获取目标位置的测量信息。
10、较佳地,所述获取待检测对象的关键点的第一三维坐标信息的步骤包括:
11、获取待检测对象的第一图像;
12、根据所述第一图像获取所述待检测对象的关键点在像素坐标系中的平面坐标信息;
13、获取所述待检测对象的第二图像,所述第二图像包括图像深度信息;
14、将所述平面坐标信息映射至所述第二图像中,以获取所述关键点的深度坐标信息;
15、根据所述平面坐标信息及所述深度坐标信息生成第一三维坐标信息。
16、较佳地,所述根据所述第一图像获取所述待检测对象的关键点在像素坐标系中的平面坐标信息的步骤包括:
17、将所述第一图像输入至关键点检测模型以获取所述待检测对象的关键点在像素坐标系中的平面坐标信息;
18、所述关键点检测模型为根据神经网络模型对样本图像进行训练所得到的模型,所述训练的金标准图像为对所述样本图像标记关键点后所生成的图像。
19、较佳地,所述第一图像及所述样本图像均为彩色图像。
20、较佳地,所述获取待检测对象的关键点的第一三维坐标信息的步骤后还包括:
21、获取所述关键点的邻接点的第二三维坐标信息;
22、所述根据所第一三维坐标信息获取所述关键点在图像坐标系中的图像坐标信息的步骤包括:
23、根据所述第一三维坐标信息及所述第二三维坐标信息获取目标三维坐标信息;
24、根据所述目标三维信息获取所述关键点在图像坐标系中的图像坐标信息。
25、较佳地,所述获取待检测对象的第一图像的步骤包括:
26、获取待检测对象的若干帧第一图像;
27、所述根据所述第一图像获取所述待检测对象的关键点在像素坐标系中的平面坐标信息的步骤包括:
28、根据所述若干帧第一图像获取每一帧第一图像的关键点的平面坐标信息;
29、根据所述每一帧第一图像的关键点的平面坐标信息获取目标关键点的平面坐标信息。
30、较佳地,所述待检测对象包括待检测人体;
31、所述根据所述图像坐标信息获取所述关键点在相机坐标系中的空间坐标信息的步骤后还包括:
32、根据所述空间坐标信息构建所述待检测人体的骨架模型。
33、本发明还提供了一种智能测量系统,所述智能测量系统包括:像素坐标获取模块、图像坐标获取模块、空间坐标获取模块、线段方程构建模块、轮廓模型构建模块及测量信息获取模块;
34、所述像素坐标获取模块用于获取待检测对象的关键点的第一三维坐标信息,所述待检测对象包括目标部位,所述关键点包括第一关键点及第二关键点,所述第一关键点为所述目标部位的两端的关键点,所述第二关键点为所述目标部位的边缘的关键点;
35、所述图像坐标获取模块用于根据所第一三维坐标信息获取所述关键点在图像坐标系中的图像坐标信息;
36、空间坐标获取模块用于根据所述图像坐标信息获取所述关键点在相机坐标系中的空间坐标信息;
37、所述线段方程构建模块用于根据所述第一关键点的空间坐标信息构建空间线段方程;
38、所述轮廓模型构建模块用于根据所述空间线段方程及所述第二关键点的空间坐标信息构建所述目标部位的轮廓模型;
39、所述测量信息获取模块用于根据所述轮廓模型获取目标位置的测量信息。
40、本发明还提供了一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上所述的智能测量方法。
41、本发明还提供了一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现如上所述的智能测量方法。
42、本发明的积极进步效果在于:本发明中,在对待检测对象的目标部位进行测量时,不需要与待检测对象接触,也无需借助测量仪器或者传感器等测量设备,在无需人工干预的情况下通过获取待检测对象的关键点的第一三维坐标信息,通过将第一三维坐标信息转换为相机坐标系中的空间坐标信息,则可以利用目标部位两端的关键点来构建空间线段方程,通过空间线段方程及目标部位的边缘的第二关键点则可以构建目标部位的轮廓模型,基于此可以对规则轮廓、以及不规则轮廓的待检测对象进行高效、准确的测量。
技术特征:
1.一种智能测量方法,其特征在于,所述智能测量方法包括:
2.如权利要求1所述的智能测量方法,其特征在于,所述获取待检测对象的关键点的第一三维坐标信息的步骤包括:
3.如权利要求2所述的智能测量方法,其特征在于,所述根据所述第一图像获取所述待检测对象的关键点在像素坐标系中的平面坐标信息的步骤包括:
4.如权利要求3所述的智能测量方法,其特征在于,所述第一图像及所述样本图像均为彩色图像。
5.如权利要求1所述的智能测量方法,其特征在于,所述获取待检测对象的关键点的第一三维坐标信息的步骤后还包括:
6.如权利要求2所述的智能测量方法,其特征在于,所述获取待检测对象的第一图像的步骤包括:
7.如权利要求1-6任意一项所述的智能测量方法,其特征在于,所述待检测对象包括待检测人体;
8.一种智能测量系统,其特征在于,所述智能测量系统包括:像素坐标获取模块、图像坐标获取模块、空间坐标获取模块、线段方程构建模块、轮廓模型构建模块及测量信息获取模块;
9.一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现权利要求1至7任一项所述的智能测量方法。
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1至7任一项所述的智能测量方法。
技术总结
本发明公开了一种智能测量方法、智能测量系统、电子设备及存储介质,智能测量方法包括:获取待检测对象的关键点的第一三维坐标信息;根据所第一三维坐标信息获取关键点在图像坐标系中的图像坐标信息;根据图像坐标信息获取关键点在相机坐标系中的空间坐标信息;根据第一关键点的空间坐标信息构建空间线段方程;根据空间线段方程及第二关键点的空间坐标信息构建目标部位的轮廓模型;根据轮廓模型获取目标位置的测量信息。本发明中,在对待检测对象的目标部位进行测量时,不需要与待检测对象接触,也无需借助测量仪器或者传感器等测量设备,在无需人工干预的情况下可以对规则轮廓、以及不规则轮廓的待检测对象进行高效、准确的测量。
技术研发人员:张世杰,季宇鑫
受保护的技术使用者:江苏一影医疗设备有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!