一种标定方法、装置、存储介质及电子设备与流程
本说明书涉及标定领域,尤其涉及一种标定方法、装置、存储介质及电子设备。
背景技术:
1、目前,无人技术正处于飞速发展的阶段,无人设备的使用率也越来越高。对于无人设备来说,传感设备是必不可少的。在实际应用中,单一传感设备能获取到的信息有限,所以无人设备通常要使用多个传感设备来完成工作。为了使无人设备能够更好地融合各传感设备采集到的数据,通常需要确定无人设备上的各传感设备之间的映射关系,也就是对各传感设备进行联合标定。例如,相机只能获取二维图像信息,却无法获取到距离;雷达只能获取到距离信息,却不能判断出目标的语义。如果将相机和雷达结合到一起,无人设备便能够通过图像与距离信息的结合得到对周围环境更可靠的描述。
2、现有技术在对相机和雷达进行联合标定时,需要利用标志物,在指定位置和姿态采集到相机和雷达足够数量的观测数据后,根据数据进行标定。其中,通常情况下雷达探测时所采用红外波段是无法被人眼观察到的,雷达采集到的数据也只能反映出采集位置到雷达处的距离,因此无法判断出雷达采集的目标,也就无法得知雷达是否和相机在对相同的目标进行采集。这导致在采集数据时,必须要对应的研发人员采用专业知识来进行采集位置的判断。
3、可见,现有技术在进行联合标定时,数据的采集需要对标定的技术原理有一定的理解才能够完成。换句话说,现有技术的联合标定中数据采集的工作有着较高的门槛。
技术实现思路
1、本说明书提供一种标定方法、装置、存储介质及电子设备,以部分的解决现有技术存在的上述问题。
2、本说明书采用下述技术方案:
3、本说明书提供了一种标定方法,包括:
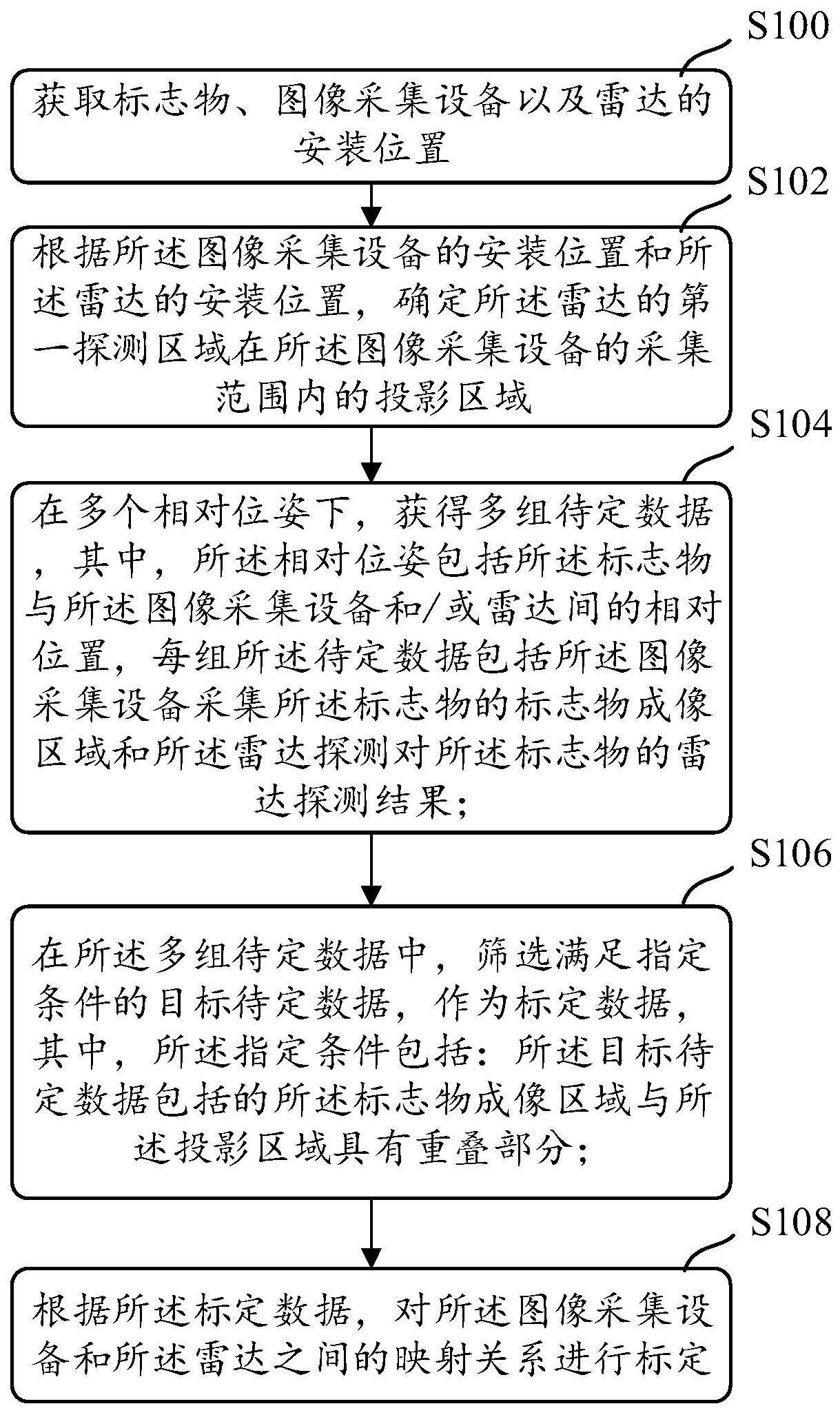
4、获取标志物、图像采集设备以及雷达的安装位置;
5、根据所述图像采集设备的安装位置和所述雷达的安装位置,确定所述雷达的第一探测区域在所述图像采集设备的采集范围内的投影区域;
6、在多个相对位姿下,获得多组待定数据,其中,所述相对位姿包括所述标志物与所述图像采集设备和/或雷达间的相对位置,每组所述待定数据包括所述图像采集设备采集所述标志物的标志物成像区域和所述雷达探测对所述标志物的雷达探测结果;
7、在所述多组待定数据中,筛选满足指定条件的目标待定数据,作为标定数据,其中,所述指定条件包括:所述目标待定数据包括的所述标志物成像区域与所述投影区域具有重叠部分;
8、根据所述标定数据,对所述图像采集设备和所述雷达之间的映射关系进行标定。
9、可选的,在所述多组待定数据中筛选满足指定条件的目标待定数据作为标定数据之前,还包括:
10、根据所述雷达和所述标志物的安装位置,确定所述雷达可探测到所述标志物的第二探测区域;
11、在所述多组待定数据中,筛选所述雷达探测结果在所述第二探测区域之内的待定数据,作为有效数据;
12、对应的,所述在所述多组待定数据中筛选满足指定条件的目标待定数据作为标定数据,包括:
13、在所述有效数据中筛选满足所述指定条件的有效数据作为所述标定数据。
14、可选的,所述目标待定数据包括的所述标志物成像区域与所述投影区域具有重叠部分,包括:所述标志物成像区域完全覆盖所述投影区域。
15、可选的,所述标志物成像区域采用下述方法确定:
16、检测所述图像采集设备采集的标志物的图像中成像的角点,根据所述角点的位置确定所述标志物所在的区域,作为所述标志物成像区域。
17、可选的,根据所述标定数据,对所述图像采集设备和所述雷达之间的映射关系进行标定,具体包括:
18、根据所述标定数据对应的所述相对位姿,确定所述图像采集设备的坐标系下的所述标志物所在的平面;
19、根据所述标志物所在的平面和所述标定数据中的雷达探测结果,对所述图像采集设备和所述雷达之间的映射关系进行标定。
20、可选的,所述映射关系,具体包括:
21、在所述坐标系下,所述雷达在所述标志物上探测到的点相对于雷达自身的方向向量,所述方向向量用于表征所述图像采集设备与所述雷达间的旋转关系;
22、在所述坐标系下,所述图像采集设备到所述雷达的平移向量,所述平移向量用于表征所述图像采集设备与所述雷达间的位移关系。
23、可选的,所述雷达探测结果包含所述雷达探测到的所述标志物上的一个或多个探测点的位置,根据所述标志物所在的平面和所述标定数据中的雷达探测结果,对所述图像采集设备和所述雷达之间的映射关系进行标定,具体包括:
24、在所述坐标系下,以所述探测点的位置到所述标志物所在的平面的距离最小为优化目标,确定所述方向向量和所述平移向量。
25、本说明书提供了一种标定装置,所述装置包括:
26、获取模块,获取标志物、图像采集设备以及雷达的安装位置;
27、确定模块,根据所述图像采集设备的安装位置和所述雷达的安装位置,确定所述雷达的第一探测区域在所述图像采集设备的采集范围内的投影区域;
28、采集模块,在多个相对位姿下,获得多组待定数据,其中,所述相对位姿包括所述标志物与所述图像采集设备和/或雷达间的相对位置,每组所述待定数据包括所述图像采集设备采集所述标志物的标志物成像区域和所述雷达探测对所述标志物的雷达探测结果;
29、筛选模块,在所述多组待定数据中,筛选满足指定条件的目标待定数据,作为标定数据,其中,所述指定条件包括:所述目标待定数据包括的所述标志物成像区域与所述投影区域具有重叠部分;
30、标定模块,根据所述标定数据,对所述图像采集设备和所述雷达之间的映射关系进行标定。
31、本说明书提供了一种计算机可读存储介质,所述存储介质存储有计算机程序,所述计算机程序被处理器执行时实现上述标定方法。
32、本说明书提供了一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现上述标定方法。
33、本说明书采用的上述至少一个技术方案能够达到以下有益效果:
34、本说明书提供的标定方法根据图像采集设备和雷达的安装位置,确定出雷达在图像采集设备的采集范围内的投影区域。在标志物与图像采集设备和/或雷达的相对位姿进行变化的过程中,采集多个相对位姿下标志物在图像中的标志物成像区域和雷达探测结果作为多组待定数据。在多组待定数据中,筛选满足指定条件的待定数据作为目标待定数据,对于每一个目标待定数据,若该目标待定数据中的标志物成像区域与所述投影区域具有重叠部分,则将该目标待定数据作为标定数据。根据得到的标定数据,对图像采集设备和雷达之间的映射关系进行标定。上述方法在采集数据时无需人工判断采集位置,简化了联合标定的流程,降低了联合标定工作的门槛。
技术特征:
1.一种标定方法,其特征在于,包括:
2.如权利要求1所述的方法,其特征在于,在所述多组待定数据中筛选满足指定条件的目标待定数据作为标定数据之前,还包括:
3.如权利要求1所述的方法,其特征在于,所述目标待定数据包括的所述标志物成像区域与所述投影区域具有重叠部分,包括:所述标志物成像区域完全覆盖所述投影区域。
4.如权利要求1所述的方法,其特征在于,所述标志物成像区域采用下述方法确定:
5.如权利要求1-4任一项所述的方法,其特征在于,根据所述标定数据,对所述图像采集设备和所述雷达之间的映射关系进行标定,具体包括:
6.如权利要求5所述的方法,其特征在于,所述映射关系,具体包括:
7.如权利要求6所述的方法,其特征在于,所述雷达探测结果包含所述雷达探测到的所述标志物上的一个或多个探测点的位置,根据所述标志物所在的平面和所述标定数据中的雷达探测结果,对所述图像采集设备和所述雷达之间的映射关系进行标定,具体包括:
8.一种标定装置,其特征在于,包括:
9.一种计算机可读存储介质,其特征在于,所述存储介质存储有计算机程序,所述计算机程序被处理器执行时实现上述权利要求1~7任一项所述的方法。
10.一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现上述权利要求1~7任一项所述的方法。
技术总结
本说明书提供的标定方法根据图像采集设备和雷达的安装位置,确定出雷达在图像采集设备的采集范围内的投影区域。在标志物与图像采集设备和/或雷达的相对位姿进行变化的过程中,采集多个相对位姿下标志物在图像中的标志物成像区域和雷达探测结果作为多组待定数据。在多组待定数据中,筛选满足指定条件的待定数据作为目标待定数据,对于每一个目标待定数据,若该目标待定数据中的标志物成像区域与所述投影区域具有重叠部分,则将该目标待定数据作为标定数据。根据得到的标定数据,对图像采集设备和雷达之间的映射关系进行标定。上述方法在采集数据时无需人工判断采集位置,简化了联合标定的流程,降低了联合标定工作的门槛。
技术研发人员:李威
受保护的技术使用者:北京三快在线科技有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!