一种基于驱动系统输出信号进行设备负载识别的方法与流程
1.本发明涉及货运物流系统技术,更具体地说,涉及一种基于驱动系统输出信号进行设备负载识别的方法。
背景技术:
2.在货运物流系统中,驱动系统是运输设备的关键组成部分,能量通过驱动系统转化为设备作业时的动力,为了确保驱动系统能有效地节约能量,延长运输设备正常运行时间,提高生产性能,就需要根据运输设备负载情况,调整对驱动系统的控制策略,以达到对能源的最优利用。
3.运输设备的不同载重需要匹配相应的运输设备运行速度和加速度,当运输设备载荷与当前速度,加速度不匹配时,不但会对运输设备上零件机构强度造成影响,还会令运输设备运行不稳定,造成一定的安全隐患,故亟待设计一种方法根据运输设备作业中实时重量来调节其运动状态。
技术实现要素:
4.针对现有技术中存在的上述缺陷,本发明的目的是提供一种基于驱动系统输出信号进行设备负载识别的方法,利用设备原有驱动系统的输出信息来进行载荷的校验,可以免去在设备上安装重量检测传感器,简化设计,极大地降低采购及人工调试成本。
5.为实现上述目的,本发明采用如下技术方案:
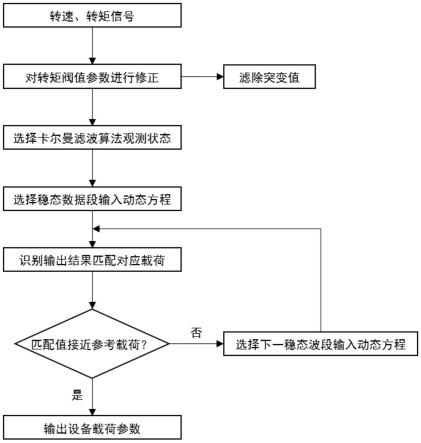
6.一种基于驱动系统输出信号进行设备负载识别的方法,包括以下步骤:
7.s1、对运输设备的驱动系统的输出转速、转矩信息进行标定;
8.s2、对转矩阀值参数进行修正;
9.s3、选择卡尔曼滤波算法滤波观测状态;
10.s4、选择稳态数据段输入动态方程;
11.s5、识别输出结果,匹配对应载荷;
12.s6、判断匹配值是否接近参考载荷,若是则进入步骤s7,若否则返回步骤s5;
13.s7、输出运输设备的载荷参数。
14.较佳的,所述步骤s1进一步包括:
15.针对所述驱动系统的全工作时间段取时间间隔为t1、t2、t3…
tn时的数据d1、d2、d3…dn
,对应的理论能计算为l1、l2、l3…
ln,若:
16.17.均成立,则此时的a为数据的阀值。
18.较佳的,所述步骤s2进一步包括:
19.分别取所述驱动系统的匀速段和加速段的数据,按照步骤s1取匀速段阀值a1,加速段阀值a2;
20.若a1≥a2,则取加速段的数据;
21.若a1≥a2,则取匀速段的数据。
22.较佳的,所述步骤s4进一步包括:
23.利用最小二乘法在已滤波段中取转速和转矩的估量值。
24.本发明所提供的一种基于驱动系统输出信号进行设备负载识别的方法,利用设备原有驱动系统的输出信息来进行载荷的校验,可以免去在设备上安装重量检测传感器,简化设计,极大地降低采购及人工调试成本。
附图说明
25.图1是本发明方法的流程示意图;
26.图2是本发明方法实施例1中载荷-输出转矩的对应关系图;
27.图3是本发明方法实施例2中载荷-输出转矩的对应关系图。
具体实施方式
28.为了能更好地理解本发明的上述技术方案,下面结合附图和实施例进一步说明本发明的技术方案。
29.结合图1所示,本发明所提供的一种基于驱动系统输出信号进行设备负载识别的方法,包括以下步骤:
30.s1、对于具有载荷下运输设备的驱动系统的输出转速、转矩信息,针对所述驱动系统的全工作时间段取时间间隔为t1、t2、t3…
tn时的数据d1、d2、d3…dn
,对应的理论能计算为l1、l2、l3…
ln,若:
[0031][0032]
均成立,则此时的a为数据的阀值(其中含转矩信息);
[0033]
s2、分别取运输设备在特定匀速段和加速段的数据,按照步骤s1取匀速段阀值a1,加速段阀值a2;
[0034]
若a1≥a2,则取加速段的数据;
[0035]
若a1≥a2,则取匀速段的数据;
[0036]
确认数据波段后,采用其数据进入下一步卡尔曼滤波计算;
[0037]
s3、在选定数据范围后,用卡尔曼滤波算法滤波;
[0038]
s4、利用最小二乘法在已滤波段中取转速和转矩的估量值;
[0039]
s5、采用转速和转矩的估量值与标定值进行匹配,利用方程确定对应的载荷关系;
[0040]
s6、根据匹配获得的载荷信息,实时更改设备驱动系统的控制输入条件,以达到对能源的最有效利用。
[0041]
上述步骤s5中,采用的方程主要如下:
[0042]
两个电机驱动力矩tf,tr
[0043]
前后载荷lf,lr
[0044]
前后转矩和t总=tf+tr
[0045]
前后总载荷l总=lf+lr
[0046]
前后力矩差
△
t=tf-tr
[0047]
前后载荷差
△
l=lf-lr
[0048]
t总=f1(l总)-f2(总迎风面积)
[0049]
t1+t2=f3(lf+lr)即t总=f3(l总)1)
[0050]
tf=f4(lf)-f5(f迎风面积)
[0051]
tr=f4(lr)-f5(r迎风面积)
[0052]
tf-tr=f6(tf-tr)即
△
t=f6(
△
l)2)
[0053]
驱动力f=t/r(滚动半径)
[0054]
f3,f6受地面,风俗,轮胎型号等因素影响。
[0055]
实施例1
[0056]
本实施例基于驱动系统输出信号进行设备负载识别的方法,采集信息如下表1所示:
[0057]
表1
[0058][0059][0060]
根据agv载荷通过本实施例基于驱动系统输出信号进行设备负载识别的方法,电机输出转矩如图2所示。
[0061]
实施例2
[0062]
本实施例基于驱动系统输出信号进行设备负载识别的方法,采集信息如下表2所示:
[0063]
表2
[0064][0065][0066]
根据agv载荷通过本实施例基于驱动系统输出信号进行设备负载识别的方法,电机输出转矩如图3所示。
[0067]
本技术领域中的普通技术人员应当认识到,以上的实施例仅是用来说明本发明,而并非用作为对本发明的限定,只要在本发明的实质精神范围内,对以上所述实施例的变化、变型都将落在本发明的权利要求书范围内。
技术特征:
1.一种基于驱动系统输出信号进行设备负载识别的方法,其特征在于,包括以下步骤:s1、对运输设备的驱动系统的输出转速、转矩信息进行标定;s2、对转矩阀值参数进行修正;s3、选择卡尔曼滤波算法滤波观测状态;s4、选择稳态数据段输入动态方程;s5、识别输出结果,匹配对应载荷;s6、判断匹配值是否接近参考载荷,若是则进入步骤s7,若否则返回步骤s5;s7、输出运输设备的载荷参数。2.根据权利要求1所述的基于驱动系统输出信号进行设备负载识别的方法,其特征在于,所述步骤s1进一步包括:针对所述驱动系统的全工作时间段取时间间隔为t1、t2、t3…
t
n
时的数据d1、d2、d3…
d
n
,对应的理论能计算为l1、l2、l3…
l
n
,若:均成立,则此时的a为数据的阀值。3.根据权利要求2所述的基于驱动系统输出信号进行设备负载识别的方法,其特征在于,所述步骤s2进一步包括:分别取所述驱动系统的匀速段和加速段的数据,按照步骤s1取匀速段阀值a1,加速段阀值a2;若a1≥a2,则取加速段的数据;若a1≥a2,则取匀速段的数据。4.根据权利要求3所述的基于驱动系统输出信号进行设备负载识别的方法,其特征在于,所述步骤s4进一步包括:利用最小二乘法在已滤波段中取转速和转矩的估量值。
技术总结
本发明公开了一种基于驱动系统输出信号进行设备负载识别的方法,包括以下步骤:S1、对运输设备的驱动系统的输出转速、转矩信息进行标定;S2、对转矩阀值参数进行修正;S3、选择卡尔曼滤波算法滤波观测状态;S4、选择稳态数据段输入动态方程;S5、识别输出结果,匹配对应载荷;S6、判断匹配值是否接近参考载荷,若是则进入步骤S7,若否则返回步骤S5;S7、输出运输设备的载荷参数。本发明利用设备原有驱动系统的输出信息来进行载荷的校验,可以免去在设备上安装重量检测传感器,简化设计,极大地降低采购及人工调试成本。及人工调试成本。及人工调试成本。
技术研发人员:黄旭东 俞骏 胡文辉 张宇欣
受保护的技术使用者:上海振华重工(集团)股份有限公司
技术研发日:2021.12.15
技术公布日:2023/1/2
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1