一种海岸线提取方法、装置、设备及介质与流程
本申请涉及深度学习,尤其涉及一种海岸线提取方法、装置、设备及介质。
背景技术:
1、海岸线是海洋与陆地的分界线,在一些标准中对海岸线的定义为:“多年大潮高潮位时的海陆界线”。实际上海岸线随潮水涨落而变动,处于变化之中,而海岸带可以看作是海岸线向陆海两侧扩展一定宽度的带状区域。海岸带是重要的生态系统之一,提取海岸线可以体现海洋、陆地、气象与人类等多方面产生的影响,是海岸带管理与保护的重要环节。
2、目前大多使用卫星遥感影像来提取海岸线位置,但是卫星采集遥感影像的时间周期较长,导致海岸线的监测周期较长,并且卫星的采集范围不能覆盖到所有的海洋区域,导致海岸线监测难度较高。
3、综上,使用卫星遥感影像监测海岸线的周期较长、难度较高,不利于海岸监测常态化。
技术实现思路
1、本申请提供了一种海岸线提取方法、装置、设备及介质,用以解决现有技术中使用卫星遥感影像监测海岸线的周期较长、难度较高的问题。
2、本申请提供了一种海岸线提取方法,所述方法包括:
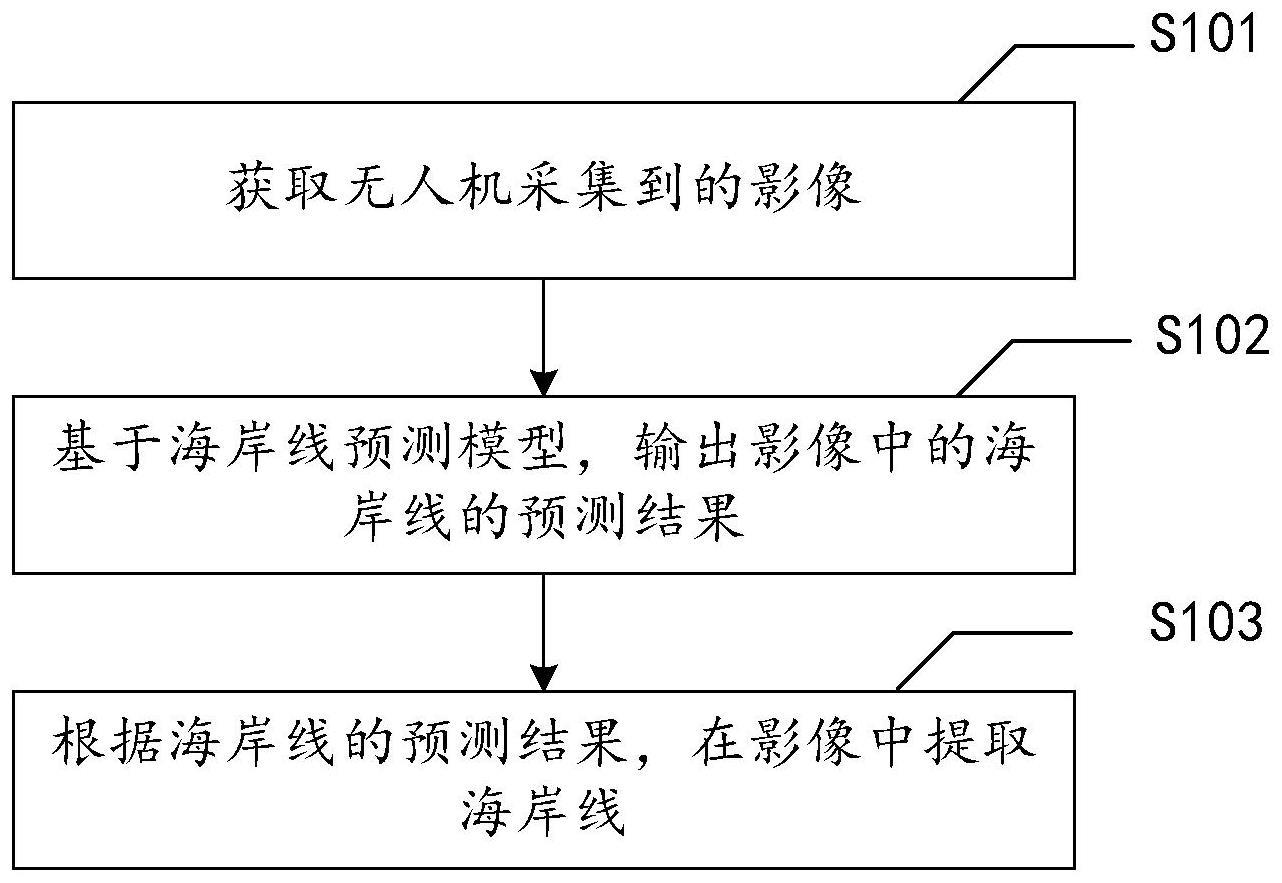
3、获取无人机采集到的影像;
4、基于海岸线预测模型,输出所述影像中的海岸线的预测结果;
5、根据所述海岸线的预测结果,在所述影像中提取海岸线。
6、进一步地,所述获取无人机采集到的影像,包括:
7、在训练集中,获取无人机采集到的第一影像和所述第一像影中的海岸线的第一标注结果;
8、所述基于海岸线预测模型,输出所述影像中的海岸线的预测结果之后,所述方法还包括:
9、根据所述第一影像、所述海岸线的第一标注结果和所述海岸线的预测结果,对所述海岸线预测模型进行训练。
10、进一步地,所述根据所述第一影像、所述海岸线的第一标注结果和所述海岸线的预测结果,对所述海岸线预测模型进行训练,包括:
11、根据所述第一影像、所述海岸线的第一标注结果和所述海岸线的预测结果,以及所述海岸线预测模型中的损失函数组合,对所述海岸线预测模型中的参数进行训练,其中损失函数组合包括diceloss、focalloss和boundaryloss中的多个损失函数。
12、进一步地,所述根据所述海岸线的标注结果和所述海岸线的预测结果,对所述海岸线预测模型进行训练,包括:
13、在验证集中,获取无人机采集到的第二影像和所述第二影像中的海岸线的第二标注结果;
14、根据所述第二影像和所述海岸线的第二标注结果,确定所述海岸线预测模型的预测精度;
15、如果在设定的验证周期内,所述海岸线预测模型的本次预测精度与上一次预测精度之间的差值在设定范围内,确定海岸线预测模型训练完成。
16、进一步地,所述海岸线预测模型为残差结构的编解码结构;
17、针对编码结构中的每个卷积块,该卷积块的输出特征图作为编码结构中该卷积块的下一个卷积块的输入特征图,以及作为解码结构中该卷积块同级卷积块的输入特征图;
18、针对解码结果中的每个卷积块,该卷积块的输入特征图包括编码结构中该卷积块同级卷积块的输入特征图和解码结构中该卷积块的上一个卷积块的输出特征。
19、进一步地,所述影像为无人机在设定飞行区域、设定飞行高度内随机选取采样点采集到的正射影像;或者
20、所述影像为无人机在设定区域、设定飞行高度内按照间隔逐个采样点采集到的正射影像,其中航向重叠度不小于第一重叠度,旁向重叠度不小于第二重叠度;
21、其中,所述设定区域与海岸基线有关。
22、进一步地,所述根据所述海岸线的预测结果,在所述影像中提取海岸线,包括:
23、对所述海岸线的预测结果进行边缘提取,并对得到的边缘提取结果进行拼接,得到拼接后的边缘图像;
24、对所述拼接后的边缘图像进行矢量化处理;
25、根据基准点坐标,在矢量化处理后的图像中确定海岸线的坐标。
26、另一方面,本申请提供了一种海岸线提取装置,所述装置包括:
27、获取单元,用于获取无人机采集到的影像;
28、预测单元,用于基于海岸线预测模型,输出所述影像中的海岸线的预测结果;
29、提取单元,用于根据所述海岸线的预测结果,在所述影像中提取海岸线。
30、另一方面,本申请提供了一种电子设备,所述电子设备包括处理器和存储器,所述处理器用于执行存储器中存储的计算机程序时实现上述任一所述海岸线提取方法的步骤。
31、另一方面,本申请提供了一种计算机可读存储介质,其存储有计算机程序,所述计算机程序被处理器执行时实现上述任一所述海岸线提取方法的步骤。
32、由于在本申请中,无人机进行影像采集,相比卫星遥感图像的采集周期和采集范围任意,能够适应不同的采集周期和采集范围,可以降低监测海岸线的周期和难度,并且通过海岸线预测模型可以有效提取出影像中的海岸线,更有利于海岸检测工作的开展。
技术特征:
1.一种海岸线提取方法,其特征在于,所述方法包括:
2.如权利要求1所述的方法,其特征在于,所述获取无人机采集到的影像,包括:
3.如权利要求2所述的方法,其特征在于,所述根据所述第一影像、所述海岸线的第一标注结果和所述海岸线的预测结果,对所述海岸线预测模型进行训练,包括:
4.如权利要求2或3所述的方法,其特征在于,所述根据所述海岸线的标注结果和所述海岸线的预测结果,对所述海岸线预测模型进行训练,包括:
5.如权利要求1所述的方法,其特征在于,所述海岸线预测模型为残差结构的编解码结构;
6.如权利要求1所述的方法,其特征在于,所述影像为无人机在设定飞行区域、设定飞行高度内随机选取采样点采集到的正射影像;或者
7.如权利要求1所述的方法,其特征在于,所述根据所述海岸线的预测结果,在所述影像中提取海岸线,包括:
8.一种海岸线提取装置,其特征在于,所述装置包括:
9.一种电子设备,其特征在于,所述电子设备包括处理器和存储器,所述处理器用于执行存储器中存储的计算机程序时实现如权利要求1-7任一所述海岸线提取方法的步骤。
10.一种计算机可读存储介质,其特征在于,其存储有计算机程序,所述计算机程序被处理器执行时实现上述权利要求1-7中任一所述海岸线提取方法的步骤。
技术总结
本申请公开了一种海岸线提取方法、装置、设备及介质,用于解决现有技术使用卫星遥感影像监测海岸线的周期较长、难度较高的问题。由于在本申请中,无人机进行影像采集,相比卫星遥感图像的采集周期和采集范围任意,能够适应不同的采集周期和采集范围,可以降低监测海岸线的周期和难度,并且通过海岸线预测模型可以有效提取出影像中的海岸线,更有利于海岸检测工作的开展。
技术研发人员:罗正宇,黄萌,刘峻豪,李合青,孙璆琛,陈小彪
受保护的技术使用者:浙江大华技术股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!