道面病害半自动化识别方法、装置、电子设备及存储介质与流程
本发明涉及道面病害识别,具体涉及道面病害半自动化识别方法、装置、电子设备及存储介质。
背景技术:
1、道面的构造特性、损害状况以及道面平整度直接影响车辆行驶或者飞机降落的安全性,同时,道面结构承载性能决定了道面的使用寿命,承载能力越差,使用寿命越短,结构性损害程度越严重。检测道面结构是道面维护的重要环节,主要是用于检测道面的病害,从而进一步维护及保养。
2、然而,道面病害的类型非常多,道面病害包括破碎板、起皮、龟裂、细微裂缝、横向裂缝、疏松、脱空等,其中一些道面病害的特征与正常的道面结构非常相似,甚至达到相同的程度,若采用全自动图像识别方法对道面病害进行识别,则无法将道面病害特征与正常的道面结构区分开来,导致识别准确率非常低。
技术实现思路
1、本发明实施例提供一种道面病害半自动化识别方法、装置、电子设备及存储介质,以提升道面病害的识别准确率以及识别效率。
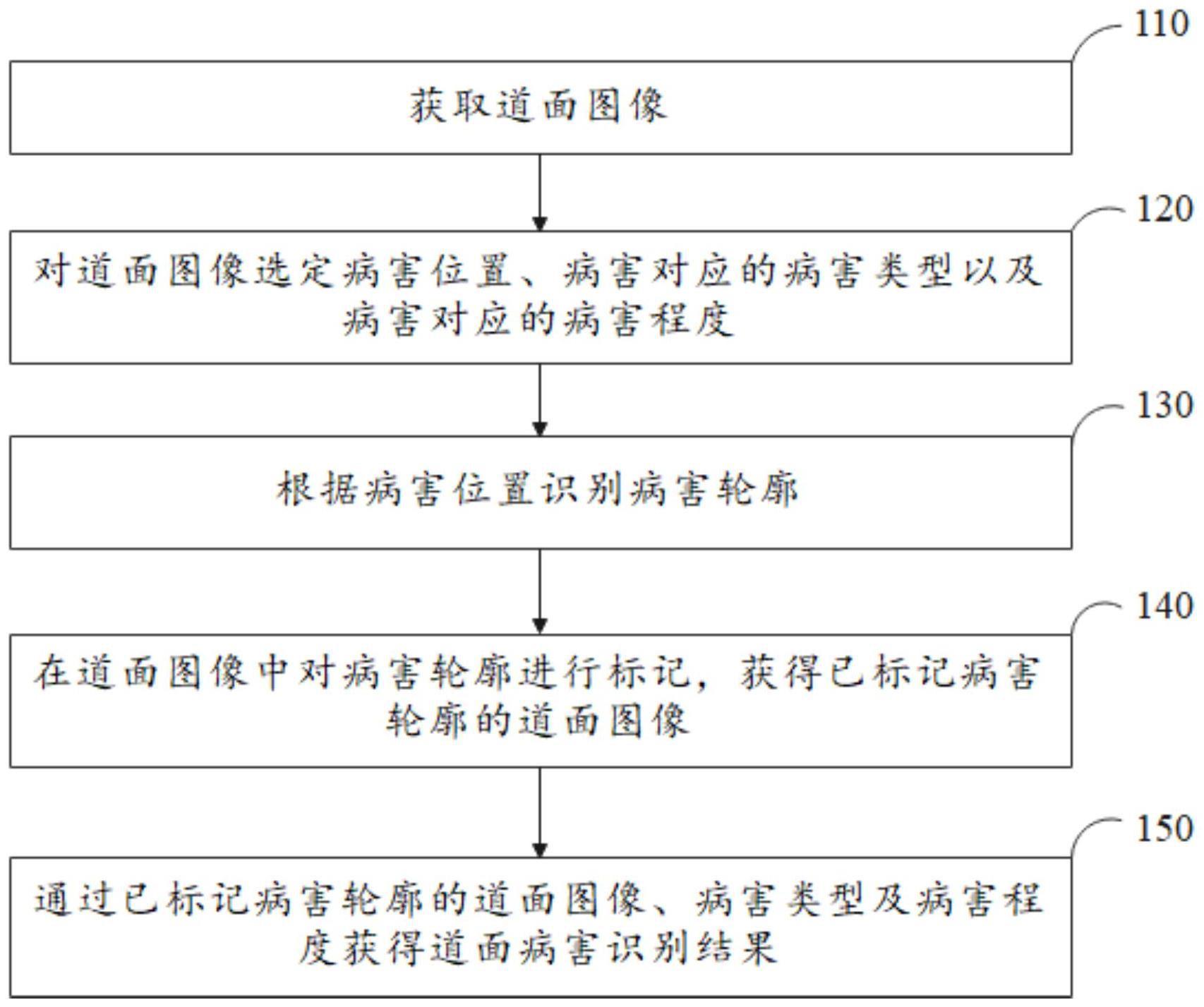
2、本发明实施例提供一种道面病害半自动化识别方法,所述方法包括:
3、获取道面图像;
4、对道面图像选定病害位置、病害对应的病害类型以及病害对应的病害程度;
5、根据病害位置识别病害轮廓;
6、在道面图像中对病害轮廓进行标记,获得已标记病害轮廓的道面图像;
7、通过已标记病害轮廓的道面图像、病害对应的病害类型以及病害对应的病害程度获得道面病害识别结果。
8、本发明实施例还提供一种道面病害半自动化识别装置,所述装置包括图像获取模块、病害位置选定模块、病害轮廓识别模块、病害轮廓标记模块以及识别结果生成模块;
9、所述图像获取模块,用于获取道面图像;
10、所述病害位置选定模块,用于对所述道面图像选定病害位置、所述病害对应的病害类型以及所述病害对应的病害程度;
11、所述病害轮廓识别模块,用于根据所述病害位置识别病害轮廓;
12、所述病害轮廓标记模块,用于在所述道面图像中对所述病害轮廓进行标记,获得已标记病害轮廓的道面图像;
13、所述识别结果生成模块,用于通过所述已标记病害轮廓的道面图像、所述病害对应的病害类型以及所述病害对应的病害程度获得道面病害识别结果。
14、在一些实施例中,所述装置还包括图像拍摄模块,所述图像拍摄模块用于:
15、设定作业行进轨道;
16、利用道面机器人沿作业行进轨道对道面进行拍摄,并获得若干道面拍摄图像;
17、通过若干道面拍摄图像生成道面图像。
18、在一些实施例中,所述病害位置选定模块包括病害位置选定子模块,所述病害位置选定子模块用于:
19、通过操作人员在所述道面图像中添加线段、控制点或图形框,以便选定病害位置。
20、在一些实施例中,所述病害轮廓识别模块包括识别子模块,所述识别子模块用于:
21、根据所述病害位置对道面图像进行裁剪,获得具有预设尺寸大小的病害位置图像;
22、对所述病害位置图像进行预处理,获得预处理后的病害位置图像;
23、通过图像轮廓提取方法对所述预处理后的病害位置图像进行病害轮廓提取,获得病害轮廓。
24、在一些实施例中,所述装置还包括病害轮廓调整模块,病害轮廓调整模块用于:
25、对病害轮廓进行调整,得到调整后的病害轮廓。
26、在一些实施例中,所述装置还包括校正模块,所述校正模块用于:
27、根据所述病害轮廓对所述病害对应的病害类型以及所述病害对应的病害程度分别进行校正,获得校正后所述病害对应的病害类型以及校正后所述病害对应的病害程度。
28、在一些实施例中,所述校正模块包括校正子模块,所述校正子模块用于:
29、根据所述病害轮廓获取所述病害的评价指标参数;
30、将所述病害的评价指标参数与预设的评价指标进行对比,获得评价指标对比结果;
31、根据所述评价指标对比结果校正所述病害对应的病害类型以及所述病害对应的病害程度。
32、在一些实施例中,所述病害的评价指标参数包括病害面积、病害深度和/或病害长度。
33、在一些实施例中,所述病害类型包括路面病害和地下病害,所述病害程度包括若干个不同等级的道面损害程度。
34、本发明实施例还提供一种电子设备,包括处理器和存储器,存储器存储有多条指令,处理器加载所述指令,以执行本发明实施例提供的任一种道面病害半自动化识别方法中的步骤。
35、本发明实施例还提供一种存储介质,存储介质存储有多条指令,指令适于处理器进行加载,以执行本发明实施例提供的任一种道面病害半自动化识别方法中的步骤。
36、本发明实施例可以获取道面图像;对道面图像选定病害位置、病害对应的病害类型以及病害对应的病害程度;根据病害位置识别病害轮廓;在道面图像中对病害轮廓进行标记,获得已标记病害轮廓的道面图像;通过已标记病害轮廓的道面图像、病害对应的病害类型以及病害对应的病害程度获得道面病害识别结果。这样,本发明通过先对道面图像选定病害位置,再根据病害位置识别病害轮廓,然后通过已标记病害轮廓的道面图像、病害对应的病害类型以及病害对应的病害程度能够获得道面病害识别结果。
37、本发明先通过在道面图像选定病害位置,然后再根据病害位置识别病害轮廓,实现了半自动化识别道面病害;与全自动以及人工识别道面病害相比,本发明提升了道面病害的识别准确率、且识别效率高,避免全局识别病害难度大的问题。
技术特征:
1.一种道面病害半自动化识别方法,其特征在于,所述方法包括:
2.如权利要求1所述的道面病害半自动化识别方法,其特征在于,在所述获取道面图像之前,包括:
3.如权利要求1或2所述的道面病害半自动化识别方法,其特征在于,所述对所述道面图像选定病害位置,包括:
4.如权利要求1所述的道面病害半自动化识别方法,其特征在于,所述根据所述病害位置识别病害轮廓,包括:
5.如权利要求1所述的道面病害半自动化识别方法,其特征在于,所述根据所述病害位置识别病害轮廓,还包括:
6.如权利要求1所述的道面病害半自动化识别方法,其特征在于,在所述通过所述已标记病害轮廓的道面图像、所述病害对应的病害类型以及所述病害对应的病害程度获得道面病害识别结果之前,包括:
7.如权利要求6所述的道面病害半自动化识别方法,其特征在于,所述根据所述病害轮廓对所述病害对应的病害类型以及所述病害对应的病害程度分别进行校正,包括:
8.如权利要求1所述的道面病害半自动化识别方法,其特征在于,所述病害的评价指标参数包括病害面积、病害深度和/或病害长度。
9.如权利要求1所述的道面病害半自动化识别方法,其特征在于,所述病害类型包括路面病害和地下病害,所述病害程度包括若干个不同等级的道面损害程度。
10.一种道面病害半自动化识别装置,其特征在于,所述装置包括图像获取模块、病害位置选定模块、病害轮廓识别模块、病害轮廓标记模块以及识别结果生成模块;
11.一种电子设备,其特征在于,包括处理器和存储器,所述存储器存储有多条指令,所述处理器加载所述指令,以执行权利要求1至9任一项所述的道面病害半自动化识别方法中的步骤。
12.一种存储介质,其特征在于,所述存储介质存储有多条指令,所述指令适于处理器进行加载,以执行权利要求1至9任一项所述的道面病害半自动化识别方法中的步骤。
技术总结
本发明实施例公开了一种道面病害半自动化识别方法、装置、电子设备及存储介质;本发明实施例包括获取道面图像;对道面图像选定病害位置、病害对应的病害类型以及病害对应的病害程度;根据病害位置识别病害轮廓;在道面图像中对病害轮廓进行标记,获得已标记病害轮廓的道面图像;通过已标记病害轮廓的道面图像、病害对应的病害类型以及病害对应的病害程度获得道面病害识别结果。本发明不仅实现了半自动化识别道面病害,还提升了道面病害的识别准确率以及识别效率。
技术研发人员:余世杰,费越,杨辉,桂仲成
受保护的技术使用者:成都圭目机器人有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!