容纳按垂直堆布置的装配有应答器的充气轮胎的仓库的管理方法与流程
本发明涉及容纳按垂直堆(vertical stack)布置的装配有应答器的充气轮胎的仓库的管理方法。此外,本发明涉及使得可以实现该管理方法的自主引导机器人。
背景技术:
1、一般而言,为了在生产线末端(通常用于将充气轮胎装载到运输集装箱中)或在分拣仓库中搬运充气轮胎,使用叉车,这些叉车装备有(通常在充气轮胎堆放置在托盘上时)将(至少)一个充气轮胎堆从基部抬起的一对叉子,或者装备有横向抓握充气轮胎堆的一对抓取器。
2、在过去的几年中,观察到了所谓的“智能”充气轮胎的出现,这些“智能”充气轮胎装配有应答器(即,装配有适合使用射频进行通信的电子装置),这使得可以远程地通信充气轮胎的诸如标识、特性和历史等的信息。
3、因此,操作员除了借助于叉车搬运充气轮胎之外,还必须能够访问这种信息,并且因此使用适当的读取器来读取与充气轮胎自身相关联的应答器,例如以验证操作员正在对正确的充气轮胎进行作业以及/或者以将对充气轮胎的位置的修改存储在电子寄存器中。
4、通常,操纵叉车的操作员装备有手动读取器(即,便于运送的重量有限的读取器):一旦充气轮胎已装载到叉车上,操作员就从叉车下来,并且通过利用读取器接近充气轮胎来读取相应的应答器,以确定地识别充气轮胎自身。然而,只要操作员必须从叉车下来(因此必须关闭叉车并将叉车布置在停车配置中)、并且还必须将手动读取器带到各充气轮胎以读取相应的应答器(即,已知的手动读取器不能同时读取充气轮胎堆中的所有充气轮胎的应答器,而是需要将读取器带到堆中的各单独充气轮胎),该操作过程就涉及显著且低效的时间损失。
5、在这方面,观察到嵌入在单个充气轮胎内的应答器的最大读取距离约为1至2米、并且充气轮胎堆具有通常大于3米(因此大于最大读取距离)的高度,这很重要;此外,当许多充气轮胎靠近在一起(堆叠)时,由于充气轮胎自身的金属部件而可能产生屏蔽和/或反射,由此进一步减小了嵌入在充气轮胎内的应答器的最大读取距离。
6、为了增加最大充气轮胎应答器读取距离,已建议在充气轮胎的外表面上(即,在充气轮胎的胎面上)应用一个或两个附加的临时的应答器(只要这些应答器明确意图在第一次组装期间被移除即可),这些应答器在不被充气轮胎屏蔽(这些应答器布置在外部)的情况下,与嵌入在充气轮胎的结构内的应答器相比,可以在更大的距离处被读取。然而,该解决方案涉及(与必须购买附加应答器的要求、以及对附加应答器进行编程和应用的要求这两者有关的)成本的显著增加,并且涉及过程所产生的废弃物的增加(附加应答器将在第一次组装期间被丢弃)。
7、在专利申请ep2733639a1中,描述了装配有细长天线的读取器的实现,该天线可以插入到充气轮胎堆中,以同时(即,利用将天线引入充气轮胎堆内可用的空间中的单个机动动作)读取该堆的所有充气轮胎的应答器。
8、装配有细长天线的这种读取器可以由操作员手动使用(在这种情况下,充气轮胎堆保持静止并且使读取器移动),或者这种读取器可以布置在固定位置(从下方在地板上或从上方在入口内),并且以将充气轮胎堆插入天线中的方式驱动叉车(在这种情况下,充气轮胎堆移动并且读取器保持静止)。然而,只要在任何情况下、要求操作员从叉车下来以将天线插入充气轮胎堆中或者要求操作员进行相当复杂的机动动作以将充气轮胎堆插入天线中(如果偶然由于机动动作的错误而导致充气轮胎撞击天线,则有损坏天线的风险),在专利申请ep2733639a1内提出的读取器就也涉及时间损失。
9、专利申请wo2020064630a1描述了一种叉车,该叉车包括装配有天线和移动单元的应答器读取器装置,该移动单元支撑天线并且能够使天线在等待位置(其中天线布置在相对于叉车抓取装置所运送的充气轮胎堆的一定距离处)和作业位置(其中天线布置在叉车抓取装置所运送的充气轮胎堆内侧)之间移动。专利申请it102018000008933中所提出的解决方案使得可以显著减少但不是完全取消操作员的时间损失;此外,该解决方案需要在叉车上安装控制和移动单元,该控制和移动单元在必须移动读取器装置的天线以使得天线能够完成一些相当大的移动方面相对笨重且复杂。
10、专利申请us2008077511a1描述了一种小型机器人车辆,该小型机器人车辆被手动引导通过商店或仓库的货架,以生成货架上的物品的库存,识别物品,辨识各物品的位置,并且读取各物品的条形码。
11、专利申请us2009021351a1描述了一种小型机器人车辆,该小型机器人车辆在通过商店或仓库的货架时,生成货架上物品的库存,从而以射频方式(或非接触地)读取贴附到物品的“智能标签”。
技术实现思路
1、本发明的目的是提供容纳按垂直堆布置的装配有应答器的充气轮胎的仓库的管理方法,该方法既没有上述缺点,同时容易且便宜地实现。
2、根据本发明,提供了根据所附权利要求书中所述的容纳按垂直堆布置的装配有应答器的充气轮胎的仓库的管理方法。
3、权利要求书描述了形成本说明书的整体部分的本发明的优选实施例。
技术特征:
1.一种用于管理仓库(1)的方法,所述仓库(1)用于容纳装配有应答器(7)的充气轮胎(2),并且所述方法包括用于将所述充气轮胎(2)以一个在另一个之上的方式进行堆叠以使得形成垂直堆的步骤,
2.根据权利要求1所述的方法,还包括以下步骤:
3.根据权利要求1或2所述的方法,还包括以下步骤:在对所述应答器(7)的读取期间,使所述自主引导机器人(8)自己转动,以使得确定所述天线(11)围绕垂直转动轴(16)的相应转动。
4.根据权利要求1至3中任一项所述的方法,其中,所述读取器装置(9)的所述天线(11)包括垂直定向的中央支撑件(12),所述中央支撑件(12)用于支撑以十字形布置且水平定向的四个单极(13)。
5.根据权利要求4所述的方法,其中,所述读取器组件(10)顺次激活所述四个单极(13),使得在各时刻单个单极(13)是活动的。
6.根据权利要求1至5中任一项所述的方法,还包括以下步骤:使用相同的传感器,特别是使用垂直向上定向的照相机,以确定所述自主引导机器人(8)在储存用的所述仓库(1)内的位置,并且在所述自主引导机器人(8)位于所述第一堆的充气轮胎(2)下面时确定所述第一堆的充气轮胎(2)的中央空腔(7)的位置。
7.根据权利要求1至6中任一项所述的方法,其中,至少一个支撑元件(3)安装在装备有轮子(26)的托架(25)中,并且使所述至少一个支撑元件(3)移动以移动相应的充气轮胎(2)。
8.根据权利要求7所述的方法,其中,将所述托架(25)推入集装箱或卡车中,以将相应的充气轮胎(2)装载到所述集装箱或所述卡车中。
9.一种自主引导机器人(8),其适用于实现根据权利要求1至8中任一项所述的方法,并且因此适用于自动辨识按堆布置的装配有应答器(7)的所述充气轮胎(2),所述自主引导机器人(8)包括:
10.根据权利要求9所述的自主引导机器人(8),其中,所述控制单元(24)被配置为:
11.根据权利要求9或10所述的自主引导机器人(8),其中,在对所述应答器(7)的读取期间,所述控制单元(24)被配置为使所述自主引导机器人(8)自己转动,以使得确定所述天线(11)围绕垂直转动轴(16)的相应转动。
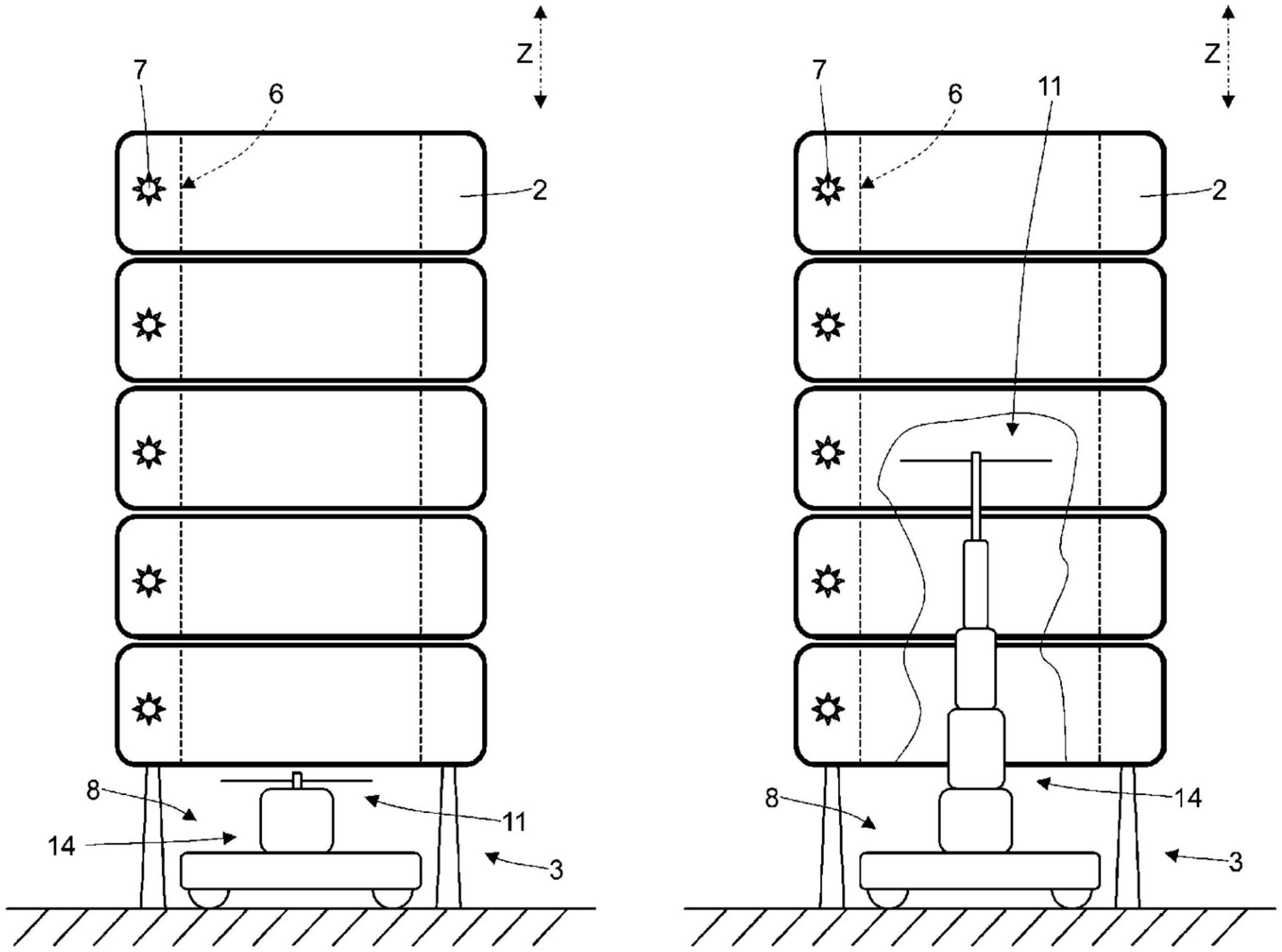
12.根据权利要求9至11中任一项所述的自主引导机器人(8),其中,所述天线(11)的所述移动单元(14)是伸缩的。
13.根据权利要求9至12中任一项所述的自主引导机器人(8),其中,所述读取器装置(9)的所述天线(11)包括垂直定向的中央支撑件(12),所述中央支撑件(12)用于支撑以十字形布置且水平定向的四个单极(13)。
14.根据权利要求13所述的自主引导机器人(8),其中,所述读取器组件(10)顺次激活所述四个单极(13),使得在各时刻单个单极(13)是活动的。
15.根据权利要求9至14中任一项所述的自主引导机器人(8),还包括至少一个传感器,特别是垂直向上定向的照相机,以确定所述自主引导机器人(8)在储存用的所述仓库(1)内的位置,并且在所述自主引导机器人(8)位于所述充气轮胎(2)的堆下面时确定该堆的充气轮胎(2)的中央空腔(7)的位置。
技术总结
自主引导机器人(8)用于自动辨识按堆布置的装配有应答器(7)的充气轮胎(2)。自主引导机器人(8)具有:主体(21),其能够在布置有充气轮胎(2)的堆的储存仓库(1)内独立地移动;读取器装置(9),其配备有读取器组件(10)和天线(11),并且能够读取应答器(7);移动单元(14),其安装在主体(21)上并支撑天线(11),并且用于使天线(11)相对于主体(21)在垂直方向(Z)上移动;以及控制单元(24)。
技术研发人员:F·艾齐娅
受保护的技术使用者:普利司通欧洲有限公司
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!