一种车辆朝向识别和获取的方法与流程
1.本发明涉及车辆算法领域,更具体地说是,涉及一种车辆朝向识别和获取的方法。
背景技术:
2.无人驾驶应用场景下,自车周围的车辆的朝向信息对于决策和路径规划有着重要的作用。车辆的朝向信息能够辅助判断车辆的未来轨迹,并对自车的路径规划造成影响。目前有些无人驾驶车辆是基于激光雷达来判断车辆的朝向信息,但激光雷达价格昂贵,且易受干扰。由于图像中车辆的朝向可能有多种变化和角度,基于图像采集设备采集到的图像信息来判断车辆朝向信息是一个需要深入研究的问题。
3.相关技术中,通常对采集到的图像进行轮廓提取,检测车辆边缘线,根据车辆边缘线来获取车辆朝向信息。但这种方法易受背景信息干扰,提取车辆边缘线很不稳定,车辆朝向信息受此影响。此外,相关技术中还有通过训练卷积深度神经网络来直接获取车辆朝向信息,但这种方法计算耗时,难以保证实时性,且结果精度受训练数据影响很大。相关技术中还有通过检测车牌及车辆结构线来确定车辆朝向的方法,这种方法需依赖于车牌和车辆结构线检测结果,对于远距离车辆朝向判断受检测结果影响很大。
4.基于图像采集设备采集到的图像信息进行车辆朝向的判断是一个对像素级信息的提取,加工和处理的过程。如下图所示,由于车辆相对于自车的朝向信息受车辆方位角θ_ray和车辆自身旋转角θ_l影响,因此在需要在图像中提取有效信息来判断和计算。
技术实现要素:
5.本发明的目的是提供一种车辆朝向识别和获取的方法。
6.本发明要解决的是现有车辆朝向识别和获取方法存在的问题。
7.与现有技术相比,本发明技术方案及其有益效果如下:
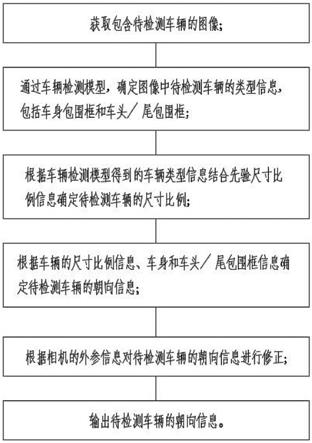
8.一种车辆朝向识别和获取的方法,包括:获取包含待检测车辆的图像;通过车辆检测模型,确定图像中待检测车辆的类型信息,包括车身包围框和车头/尾包围框;根据车辆检测模型得到的车辆类型信息结合先验尺寸比例信息确定待检测车辆的尺寸比例;根据车辆的尺寸比例信息、车身和车头/尾包围框信息确定待检测车辆的朝向信息;根据相机的外参信息对待检测车辆的朝向信息进行修正;输出待检测车辆的朝向信息。
9.作为进一步改进的,待检测车辆的朝向信息为待检测车辆相对于自车的朝向。
10.作为进一步改进的,待检测车辆的朝向信息为待检测车辆相对于图像采集设备的朝向。
11.作为进一步改进的,包含待检测车辆的图像是通过图像采集装置采集到的图像。
12.作为进一步改进的,图像采集装备位于自车前挡风玻璃内部。
13.作为进一步改进的,图像采集装备位于自车后视镜附近。
14.本发明的有益效果为:本方案计算简单,鲁棒性好,对检测模型要求低,能够适应不同的场景和路况,并且更为快速和可靠的确定车辆的朝向信息。
附图说明
15.图1是本发明实施例提供的一种车辆朝向识别和获取的方法示意图。
16.图2是本发明实施例提供的一种车辆朝向识别和获取的方法的第一计算示意图。
17.图3是本发明实施例提供的一种车辆朝向识别和获取的方法的第二计算示意图。
具体实施方式
18.为使本发明实施方式的目的、技术方案和优点更加清楚,下面将结合本发明实施方式中的附图,对本发明实施方式中的技术方案进行清楚、完整地描述,显然,所描述的实施方式是本发明一部分实施方式,而不是全部的实施方式。基于本发明中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本发明保护的范围。因此,以下对在附图中提供的本发明的实施方式的详细描述并非旨在限制要求保护的本发明的范围,而是仅仅表示本发明的选定实施方式。基于本发明中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本发明保护的范围。
19.在本发明的描述中,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
20.参照图1至图3所示,一种车辆朝向识别和获取的方法,包括:获取包含待检测车辆的图像;通过车辆检测模型,确定图像中待检测车辆的类型信息,包括车身包围框和车头/尾包围框;根据车辆检测模型得到的车辆类型信息结合先验尺寸比例信息确定待检测车辆的尺寸比例;根据车辆的尺寸比例信息、车身和车头/尾包围框信息确定待检测车辆的朝向信息;根据相机的外参信息对待检测车辆的朝向信息进行修正;输出待检测车辆的朝向信息。
21.本实施例中,待检测车辆的朝向信息为待检测车辆相对于自车的朝向。另一方面,待检测车辆的朝向信息也可以为待检测车辆相对于图像采集设备的朝向。
22.作为进一步改进的,包含待检测车辆的图像是通过图像采集装置采集到的图像。
23.图像采集装备位于自车前挡风玻璃内部。另一方面,图像采集装备也可以位于自车后视镜附近。
24.基于图像采集设备采集到的图像信息进行车辆朝向的判断是一个对像素级信息的提取,加工和处理的过程。如图2所示,由于车辆相对于自车的朝向信息受车辆方位角θ_ray和车辆自身旋转角θ_l影响,因此在需要在图像中提取有效信息来判断和计算。
25.车辆检测模型用于根据训练好的参数来推理确定图像中车辆的类别信息、待检测车辆在图像中的包围框,车头/尾包围框。待检测车辆的类别信息是用以确定待检测车辆的尺寸比例信息。待检测车辆在图像中的包围框,车头/尾包围框是采用矩形框来表示。
26.参照图3所示,待检测车辆在图像中的包围框,车头/尾包围框会在成像平面形成三个点(图中用a,c,b表示),而根据角度几何关系以及正弦定理,可得到如下公式:
27.28.其中l为待检测车辆的长度,w为待检测车辆的宽度,由此得到待检测车辆的长宽比信息。实际应用中,该长宽比信息可由待检测车辆类别信息结合该类型车辆先验尺寸比例信息确定。确定长宽比信息后代入公式。角度θ为待检测车辆与相机坐标系zc轴的夹角;角度aod为待检测车辆外侧包围框在图像上的左下点与相机视点形成的角度,该角度值可由车头/尾检测包围框在图像上a点的像素坐标信息与相机焦距通过三角函数计算得到;角度bod为待检测车辆靠近图像中心线侧的包围框在图像上的右下点与相机视点形成的角度,该角度值可由车身检测包围框在图像上b点的像素坐标信息与相机焦距通过三角函数计算得到。角度cod为待检测车辆车尾包围框在图像上的点与相机视点形成的角度,该角度值可由车头/尾检测包围框在图像上c点的像素坐标信息与相机焦距通过三角函数计算得到。将这些信息代入上述公式,可求解得到待检测车辆与相机zc轴的夹角。
29.得到待检测车辆相对于自车相机的朝向信息后,结合相机的外参信息,可以轻易求解得到待检测车辆相对于自车的朝向信息。
30.以上实施例仅用以解释说明本发明的技术方案而非对其限制。本领域技术人员应当理解,未脱离本发明精神和范围的任何修改和等同替换,均应落入本发明权利要求的保护范围中。
技术特征:
1.一种车辆朝向识别和获取的方法,其特征在于,包括:获取包含待检测车辆的图像;通过车辆检测模型,确定图像中待检测车辆的类型信息,包括车身包围框和车头/尾包围框;根据车辆检测模型得到的车辆类型信息结合先验尺寸比例信息确定待检测车辆的尺寸比例;根据车辆的尺寸比例信息、车身和车头/尾包围框信息确定待检测车辆的朝向信息;根据相机的外参信息对待检测车辆的朝向信息进行修正;输出待检测车辆的朝向信息。2.根据权利要求1所述的一种车辆朝向识别和获取的方法,其特征在于,待检测车辆的朝向信息为待检测车辆相对于自车的朝向。3.根据权利要求1所述的一种车辆朝向识别和获取的方法,其特征在于,待检测车辆的朝向信息为待检测车辆相对于图像采集设备的朝向。4.根据权利要求1所述的一种车辆朝向识别和获取的方法,其特征在于,包含待检测车辆的图像是通过图像采集装置采集到的图像。5.根据权利要求4所述的一种车辆朝向识别和获取的方法,其特征在于,图像采集装备位于自车前挡风玻璃内部。6.根据权利要求4所述的一种车辆朝向识别和获取的方法,其特征在于,图像采集装备位于自车后视镜附近。
技术总结
本发明提供了一种车辆朝向识别和获取的方法,包括:获取包含待检测车辆的图像;通过车辆检测模型,确定图像中待检测车辆的类型信息,包括车身包围框和车头/尾包围框;根据车辆检测模型得到的车辆类型信息结合先验尺寸比例信息确定待检测车辆的尺寸比例;根据车辆的尺寸比例信息、车身和车头/尾包围框信息确定待检测车辆的朝向信息;根据相机的外参信息对待检测车辆的朝向信息进行修正;输出待检测车辆的朝向信息。本方案计算简单,鲁棒性好,对检测模型要求低,能够适应不同的场景和路况,并且更为快速和可靠的确定车辆的朝向信息。且更为快速和可靠的确定车辆的朝向信息。且更为快速和可靠的确定车辆的朝向信息。
技术研发人员:徐彪 李勇 桂瀚洋 董健 刘飞龙
受保护的技术使用者:上海宏景智驾信息科技有限公司
技术研发日:2022.01.20
技术公布日:2022/5/17
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1