信息处理方法、装置、电子设备及存储介质与流程
本申请涉及计算机,尤其涉及一种信息处理方法、装置、电子设备及存储介质。
背景技术:
1、目前众包设备品牌不一,且一般是鱼眼镜头,有较大畸变。为了得到较真实的图像或进行精准测距、三维重建等,会选择对相机内参进行标定,从而可以使用标定后的内参进行图像矫正、测距和三维重建等。但相关技术中一般直接使用众包设备采集的图像估计相机内参,导致内参估计不够精准,从而导致图像矫正、三维重建等效果欠佳。
技术实现思路
1、有鉴于上述存在的技术问题,本申请提出了信息处理方法、装置、电子设备及存储介质。
2、根据本申请的一方面,提供了一种信息处理方法,所述方法包括:
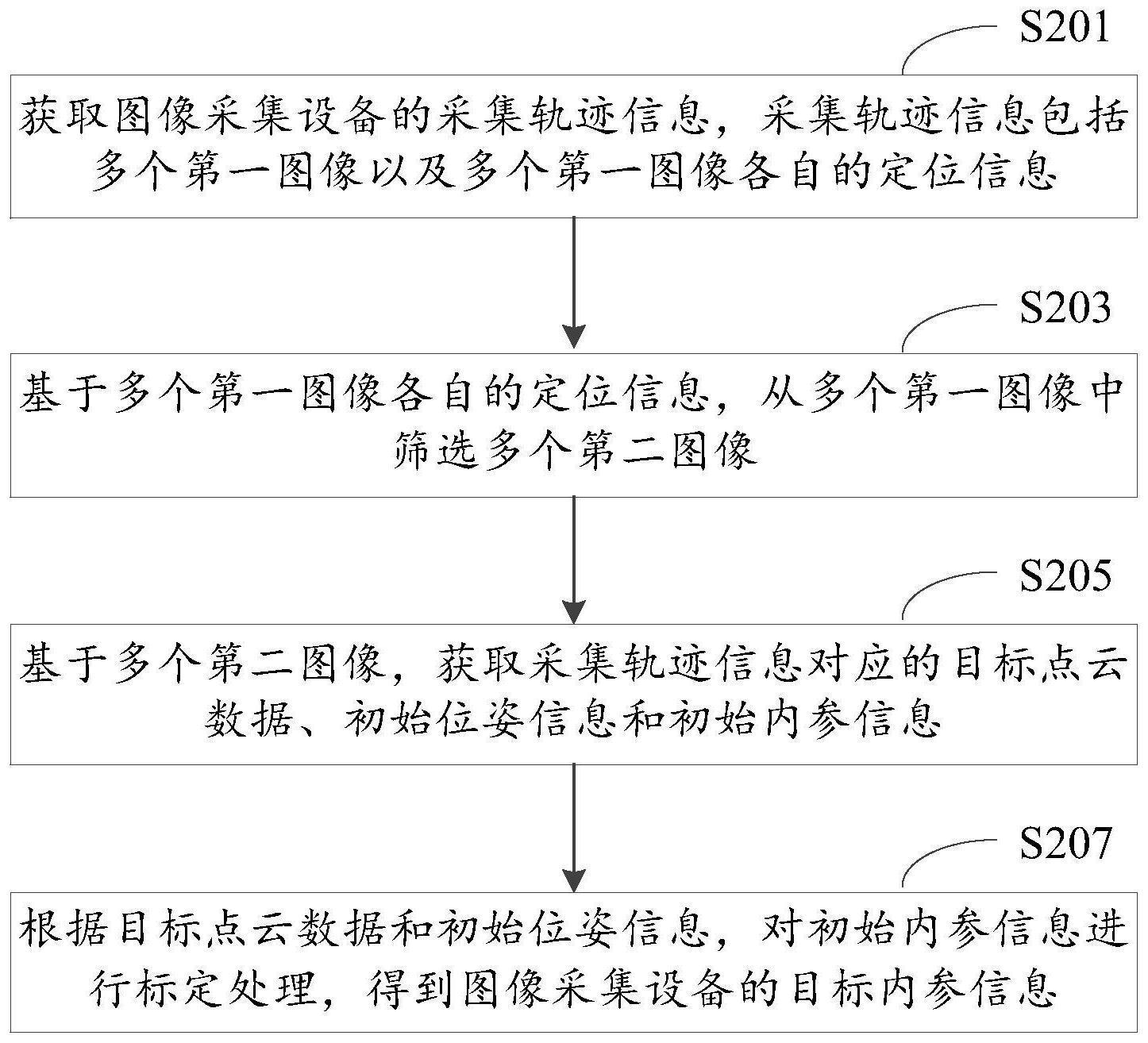
3、获取图像采集设备的采集轨迹信息,所述采集轨迹信息包括多个第一图像以及所述多个第一图像各自的定位信息;
4、基于多个第一图像各自的所述定位信息,从所述多个第一图像中筛选多个第二图像,所述多个第二图像的定位信息对应的轨迹角度变化信息大于角度阈值;
5、基于所述多个第二图像,获取所述采集轨迹信息对应的目标点云数据、初始位姿信息和初始内参信息;
6、根据所述目标点云数据和所述初始位姿信息,对所述初始内参信息进行标定处理,得到所述图像采集设备的目标内参信息。
7、根据本申请的另一方面,提供了一种信息处理装置,包括:
8、获取模块,用于获取图像采集设备的采集轨迹信息,所述采集轨迹信息包括多个第一图像以及所述多个第一图像各自的定位信息;
9、筛选模块,用于基于多个第一图像各自的所述定位信息,从所述多个第一图像中筛选多个第二图像,所述多个第二图像的定位信息对应的轨迹角度变化信息大于角度阈值;
10、三维恢复模块,用于基于所述多个第二图像,获取所述采集轨迹信息对应的目标点云数据、初始位姿信息和初始内参信息;
11、目标内参信息获取模块,用于根据所述目标点云数据和所述初始位姿信息,对所述初始内参信息进行标定处理,得到所述图像采集设备的目标内参信息。
12、根据本申请的另一方面,提供了一种电子设备,包括:处理器;用于存储处理器可执行指令的存储器;其中,所述处理器被配置为执行上述方法。
13、根据本申请的另一方面,提供了一种非易失性计算机可读存储介质,其上存储有计算机程序指令,其中,所述计算机程序指令被处理器执行时实现上述方法。
14、通过图像采集设备采集的多个第一图像以及多个第一图像各自的定位信息,从多个第一图像中筛选出轨迹角度变化信息大于角度阈值的多个第二图像,从而基于多个第二图像获取目标点云数据、初始位姿信息和初始内参信息,以及根据目标点云数据和初始位姿信息,对初始内参信息进行标定,由于多个第二图像的轨迹角度变化信息大于角度阈值,可以有效约束内参,从而可以提升内参标定的准确性,即可以实现自动且精准地标定内参的目的。
15、根据下面参考附图对示例性实施例的详细说明,本申请的其它特征及方面将变得清楚。
技术特征:
1.一种信息处理方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述基于多个第一图像各自的所述定位信息,从所述多个第一图像中筛选多个第二图像,包括:
3.根据权利要求1所述的方法,其特征在于,所述基于所述多个第二图像,获取所述采集轨迹信息对应的目标点云数据、初始位姿信息和初始内参信息,包括:
4.根据权利要求1所述的方法,其特征在于,所述采集轨迹信息为多个采集轨迹的信息;所述基于所述多个第二图像,获取所述采集轨迹信息对应的目标点云数据、初始位姿信息和初始内参信息,包括:
5.根据权利要求1-4任一项所述的方法,其特征在于,根据所述目标点云数据和所述初始位姿信息,对所述初始内参信息进行标定处理,得到所述图像采集设备的目标内参信息,包括:
6.根据权利要求5所述的方法,其特征在于,所述基于所述多个像素点偏差信息,对所述初始内参信息进行标定处理,得到所述目标内参信息,包括:
7.根据权利要求6所述的方法,其特征在于,所述基于所述累计偏差信息和所述累计偏差阈值,对所述初始内参信息进行更新,包括:
8.一种信息处理装置,其特征在于,包括:
9.一种电子设备,其特征在于,包括:
10.一种非易失性计算机可读存储介质,其上存储有计算机程序指令,其特征在于,所述计算机程序指令被处理器执行时实现权利要求1至7中任意一项所述的方法。
技术总结
本申请涉及一种信息处理方法、装置、电子设备及存储介质,可以应用于地图领域。该方法包括:获取图像采集设备的采集轨迹信息,所述采集轨迹信息包括多个第一图像以及所述多个第一图像各自的定位信息;基于多个第一图像各自的所述定位信息,从所述多个第一图像中筛选多个第二图像,所述多个第二图像的定位信息对应的轨迹角度变化信息大于角度阈值;基于所述多个第二图像,获取所述采集轨迹信息对应的目标点云数据、初始位姿信息和初始内参信息;根据所述目标点云数据和所述初始位姿信息,对所述初始内参信息进行标定处理,得到所述图像采集设备的目标内参信息。根据本申请的技术方案,可以提高目标内参信息的精度。
技术研发人员:王海川,唐逸之
受保护的技术使用者:腾讯科技(深圳)有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!