一种基于3D点云的模板匹配方法与流程
本发明涉及计算机视觉相关,尤其涉及一种基于3d点云的模板匹配方法。
背景技术:
1、图像匹配问题是计算机视觉、图像处理领域中的基本问题。图像匹配是数字图像处理领域的一项重要研究,其在计算机视觉、航天航空遥感测量、景物制导、模式识别和医学图像处理等方面有着广泛的应用。模板匹配就是根据已知的模板图片在另一幅图中搜索类似模板的目标。
2、匹配算法可分为:基于灰度的图像匹配算法,基于特征的图像匹配算法。基于灰度的图像匹配算法直接利用图像的灰度信息进行匹配,通过像素对之间的某种相似性度量的全局最优化实现匹配,不需要进行图像分割和特征提取,可以避免由预处理造成的精度损失,但是这类方法匹配速度较慢,对灰度信息变化,光照变化,噪音等非常敏感,而且当目标物存在一定角度的旋转和缩放时无法匹配。
3、基于特征的图像匹配算法通常需要经过复杂的图像处理提取特征,通常在模板图像和目标图像之间提取旋转、平移、缩放等具有不变性的特征,这类算法的优点是:充分利用图像灰度特效和相关特性,有效的消除由于背景或者光照引起的误匹配,对图像的各种非本质变化(旋转、缩放、光照强度变化等) 不敏感,但是这类算法的缺点是:算法复杂、计算量大。
4、现有技术中的操作方法:
5、步骤(1):确定输入角度搜索范围,以中间角度值及搜索范围的首末两个角度为搜索角度,旋转搜索窗口分别进行灰度归一化互相关匹配,获得各自匹配值;
6、步骤(2):将角度间距缩小一倍定为新角度搜索范围,以步骤(1)中取得最大匹配值角度为中心,左右再取两个角度,旋转搜索窗口进行灰度归一化互相关匹配;
7、步骤(3):重新比较步骤(2)中三个角度进行匹配时的匹配值,取最大者为中心,角度间距继续缩小一半,左右取两个角度,旋转搜索窗口进行灰度归一化互相关匹配;
8、步骤(4):重复步骤(3),直到角度间距达到指定的精度,进行匹配,获得最后的匹配角度、匹配位置及匹配值。
9、上述方法的缺点:
10、1、角度搜索范围间隔较大,初始角度容易造成匹配错误。
11、2、基于灰度的模板匹配方法,当由光照变化等原因导致灰度变化较大时,会影响匹配结果。
12、有鉴于上述的缺陷,本设计人积极加以研究创新,以期创设一种基于3d点云的模板匹配方法,使其更具有产业上的利用价值。
技术实现思路
1、为解决上述技术问题,本发明的目的是提供一种基于3d点云的模板匹配方法。
2、为实现上述目的,本发明采用如下技术方案:
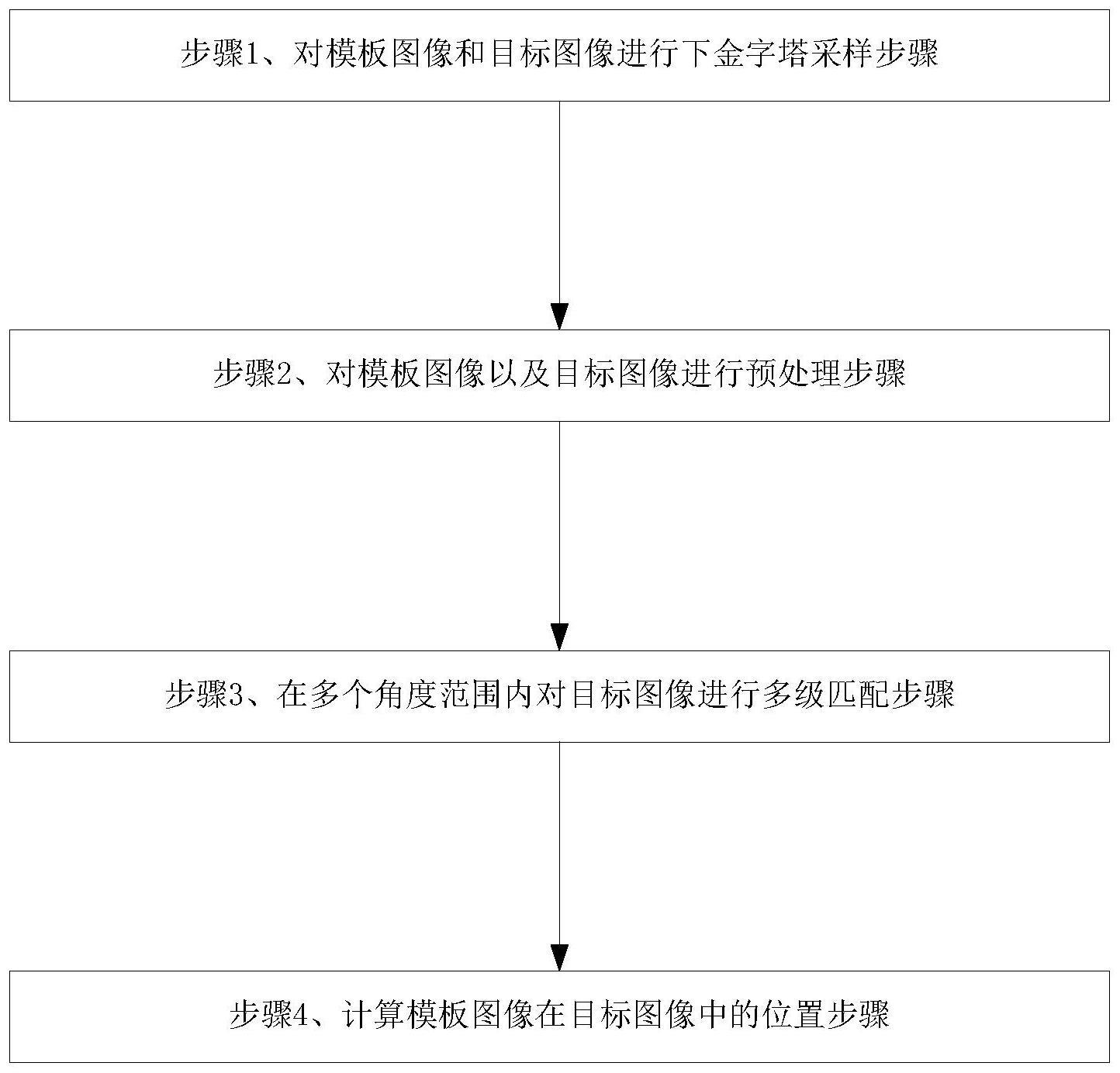
3、一种基于3d点云的模板匹配方法,依次包括以下步骤:
4、步骤1、对模板图像和目标图像进行下金字塔采样步骤;
5、步骤2、对模板图像以及目标图像进行预处理步骤;
6、步骤3、在多个角度范围内对目标图像进行多级匹配步骤;
7、步骤4、计算模板图像在目标图像中的位置步骤。
8、作为本发明的进一步改进,步骤1中,针对不同的需求,采用不同的采样图片以及设置若干个匹配精度进行匹配。
9、作为本发明的进一步改进,匹配精度包括1度、0.1度和0.01度。
10、作为本发明的进一步改进,步骤2中预处理步骤包括滤波和图像增强。
11、作为本发明的进一步改进,步骤3包括以下步骤:
12、步骤31、根据设定的旋转角度范围[a,b]对目标图像进行旋转,旋转中心为图像中心,角度间隔为1度,每次旋转之后,进行匹配,获得最佳匹配点与匹配度;比较每次旋转之后得到的匹配度,选择匹配度最高时对应的角度a1,若精度设置为1度,则将角度a1以及匹配点(x0,y0)输出,转入步骤4,否则,将角度a1带入步骤32;
13、步骤32、在角度范围[a1-0.5,a1+0.5]范围内继续进匹配,对目标图像进行旋转,旋转中心为图像中心,角度间隔为0.1度,进行匹配,获得最佳匹配点与匹配度;比较每次旋转之后得到的匹配度,选择匹配度最高时对应的角度a1,若精度设置为0.1度,则将角度a1以及匹配点(x0,y0)输出,转入步骤4,否则,将角度a1带入步骤33;
14、步骤33、在角度范围[a1-0.05,a1+0.05]范围内继续进匹配,对目标图像进行旋转,旋转中心为图像中心,角度间隔为0.01度,进行匹配,获得最佳匹配点与匹配度;比较每次旋转之后得到的匹配度,选择匹配度最高时对应的角度 a1以及匹配点(x0,y0)作为匹配结果输出,转入步骤4。
15、作为本发明的进一步改进,步骤31、步骤32和步骤33中均通过互相关归一化匹配算法进行匹配。
16、作为本发明的进一步改进,步骤4中,根据步骤3得到的匹配结果,计算模板图像在目标图像中的位置,则根据匹配结果计算得到目标图像中模板图片的左上角顶点坐标为:
17、x1=(x0-xc)*cos(a1)-(y0-yc)*sin(a1)+xc;
18、y1=(x0-xc)*sin(a1)+(y0-yc)*cos(a1)+yc;
19、其中,(xc,yc)为目标图像中心点坐标。
20、借由上述方案,本发明至少具有以下优点:
21、本发明可以有效的克服灰度信息变化、光照变化、旋转等对模板匹配结果的影响,给出精确的定位结果,精度较高;
22、本发明利用角度搜索策略解决匹配时图像存在旋转的问题,且初始搜索角度间隔较小,避免了初始角度匹配出现错误的问题;
23、本发明根据不同需求,可以设置不同的精度于匹配速度;
24、本发明利用3d点云图代替模板匹配中使用的灰度图,克服灰度信息变化、光照变化等对模板匹配结果的影响。
25、上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,并可依照说明书的内容予以实施,以下以本发明的较佳实施例并配合附图详细说明如后。
技术特征:
1.一种基于3d点云的模板匹配方法,其特征在于,依次包括以下步骤:
2.如权利要求1所述的一种基于3d点云的模板匹配方法,其特征在于,所述步骤1中,针对不同的需求,采用不同的采样图片以及设置若干个匹配精度进行匹配。
3.如权利要求2所述的一种基于3d点云的模板匹配方法,其特征在于,所述匹配精度包括1度、0.1度和0.01度。
4.如权利要求1所述的一种基于3d点云的模板匹配方法,其特征在于,所述步骤2中预处理步骤包括滤波和图像增强。
5.如权利要求1所述的一种基于3d点云的模板匹配方法,其特征在于,所述步骤3包括以下步骤:
6.如权利要求5所述的一种基于3d点云的模板匹配方法,其特征在于,所述步骤31、步骤32和步骤33中均通过互相关归一化匹配算法进行匹配。
7.如权利要求1所述的一种基于3d点云的模板匹配方法,其特征在于,所述步骤4中,根据步骤3得到的匹配结果,计算模板图像在目标图像中的位置,则根据匹配结果计算得到目标图像中模板图片的左上角顶点坐标为:
技术总结
本发明涉及一种基于3D点云的模板匹配方法,依次包括以下步骤:步骤1、对模板图像和目标图像进行下金字塔采样步骤;步骤2、对模板图像以及目标图像进行预处理步骤;步骤3、在多个角度范围内对目标图像进行多级匹配步骤;步骤4、计算模板图像在目标图像中的位置步骤。本发明可以有效的克服灰度信息变化、光照变化、旋转等对模板匹配结果的影响,给出精确的定位结果,精度较高。
技术研发人员:王磊,周坤,周剑
受保护的技术使用者:苏州深浅优视智能科技有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!