一种基于激光雷达与双目摄像头融合的3D目标检测方法及装置与流程
本发明涉及无人驾驶汽车感知,尤其涉及基于激光雷达与双目摄像头融合的3d目标检测方法及装置。
背景技术:
1、为缓解交通拥堵、减少能源消耗、提高驾驶安全,无人驾驶汽车已经成为近年来的研究热点。在无人驾驶汽车的研究中,使用合理的 3d目标检测方法快速而精确地检测出车辆行驶环境中的障碍物,可以为后续规划、决策和控制算法提供有力支持,是保证车辆安全行驶的前提。
2、目前,无人驾驶汽车上主要采用激光雷达、摄像头、毫米波雷达等作为环境感知传感器,车辆行驶场景越复杂,越需要采用在车上布置多个传感器的技术方案。通过对多个传感器的输出信息进行融合,来获得更加丰富准确的车辆行驶场景信息。比如,将激光雷达与摄像头的信息进行融合,不仅可以得到360°范围内的环境信息,还可以检测识别出目标的具体类型。基于深度学习的目标检测方法,是当前目标检测的研究热点,在视觉方面得到了很好的应用,并实现了大量落地。但由于激光雷达点云数据量大,具有无序性和无结构性,并不适合采用该方法进行3d目标检测。因此,需要提供一种合理的3d 目标检测方法,对激光雷达与摄像头融合后的信息进行目标检测。
技术实现思路
1、本发明针对现有3d目标检测技术存在的缺陷,提出一种基于激光雷达与双目摄像头融合的3d目标检测方法及装置,用于快速准确地检测出环境中的3d目标。
2、为实现上述目的,本发明提供的技术方案如下:
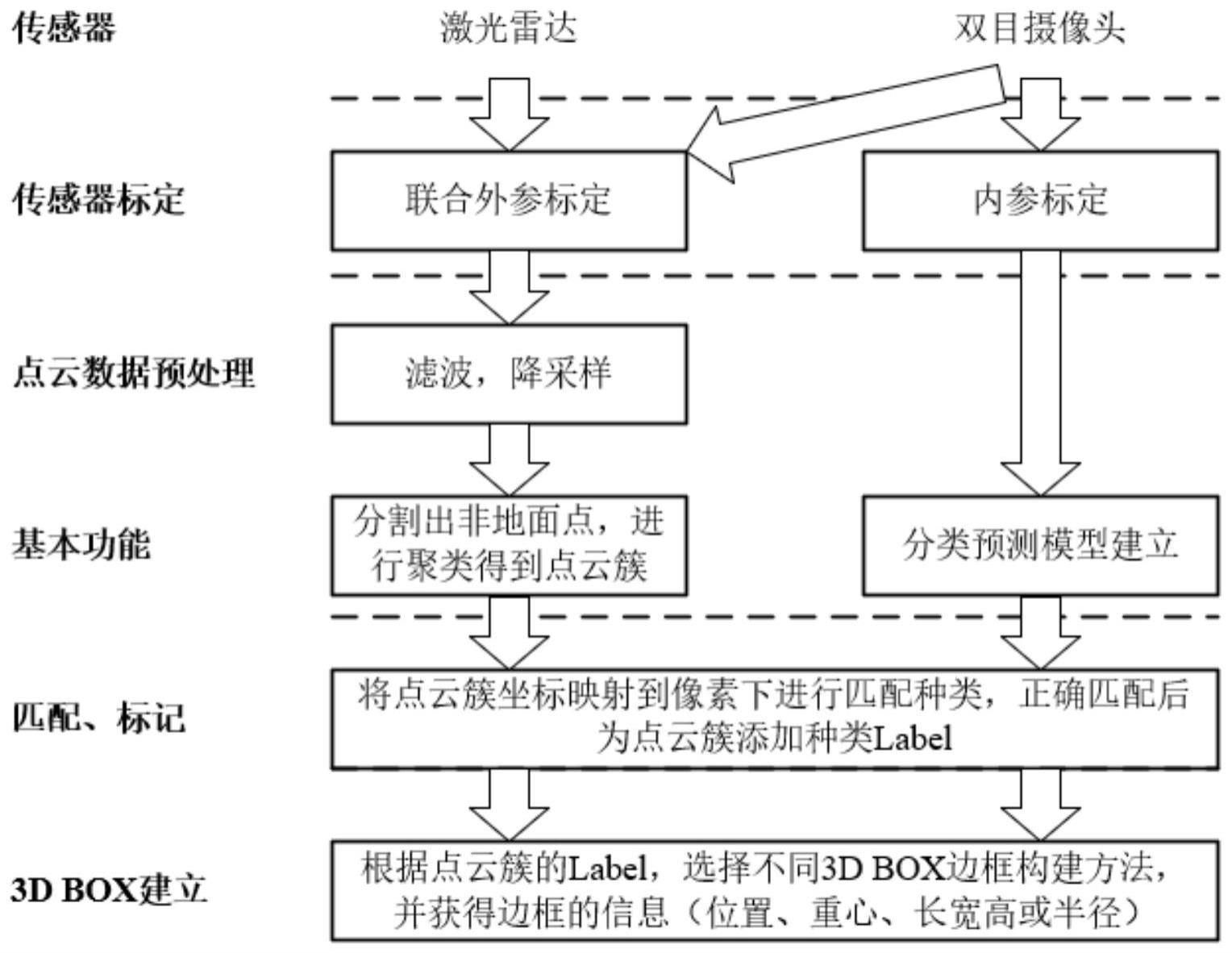
3、步骤a:对激光雷达与双目摄像头进行参数标定;
4、步骤b:对激光雷达点云数据进行预处理;
5、步骤c:对激光雷达点云进行地面分割、聚类;
6、步骤d:建立目标分类预测模型;
7、步骤e:进行3d目标匹配与检测。
8、进一步的,所述步骤a具体包括以下步骤:
9、步骤a1:获取激光雷达原始点云数据和双目摄像头原始rgb图像数据,并进行解析;
10、步骤a2:对双目摄像头进行内参标定,同时对激光雷达、双目摄像头进行外参联合标定,实现二者输出的数据在空间上和时间上的同步。并将标定后的点云数据转换成ros消息格式进行发布。
11、进一步的,所述步骤b具体包括以下步骤:
12、步骤b1:将ros消息格式的点云数据装换成pcl格式的点云数据;
13、步骤b2:采用roi方法对激光雷达点云进行筛选,提取出车辆行驶时的感兴趣区域;
14、步骤b3:采用voxelgrid方法对感兴趣区域的点云进行降采样处理,降低点云后续处理的计算量。
15、进一步的,所述步骤c具体包括以下步骤:
16、步骤c1:采用基于lpr的地平面拟合分割方法对点云数据进行地平面拟合,将点云分割成地面点云和非地面点云,避免地面点对位于地面上物体点集造成干扰。
17、步骤c2:采用欧几里得聚类方法对非地面点云进行聚类处理,分割出车辆、行人等单个障碍物点云簇,并将点云簇转换成ros消息格式进行发布。
18、进一步的,所述步骤d具体包括:采用yolov3网络来建立分类预测模型,可以快速地识别出障碍物目标的具体类别。
19、进一步的,所述步骤e具体包括以下步骤:
20、步骤e1:计算聚类得到的障碍物点云簇的位置坐标,然后将坐标值映射到2d像素中进行label匹配,并将正确匹配到的label标注到每个点云簇的属性中;
21、步骤e2:根据每个障碍物点云簇的label,选择不同的3d box 框建立方法对点云簇添加合适的边界框,边界框代表不可碰撞区域,后续路径规划和决策时,需考虑该区域,避免发生碰撞。
22、本发明提供一种基于激光雷达与双目摄像头融合的3d目标检测装置,该装置包括:
23、信息采集模块:包括1个32线激光雷达和1个双目摄像头,用于采集车辆行驶场景信息,包括车辆、行人、交通设施等信息。
24、传感器标定模块:对激光雷达和双目摄像头进行内参和外参标定,使二者输出的场景数据信息在时间和空间上同步,有利于后续的信息匹配,提高感知精度。
25、点云数据处理模块:对激光雷达原始点云数据进行roi提取和 voxelgrid滤波处理,去除噪声、降低点云后续处理的计算量;然后对点云进行地面分割处理,得到非地面点云,并对非地面点云进行聚类处理,得到分割后的障碍物点云簇。
26、分类预测模型建立模块:采用yolov3网络来建立分类预测模型,通过训练,可以快速对障碍物目标进行分类。
27、3d目标匹配与检测模块:计算障碍物点云簇的位置坐标,并将其映射到2d像素中进行label匹配,对每个点云簇标注相应的label 属性;根据每个点云簇标注的label,选择不同的3d box框建立方法对点云簇添加边界框,计算边界框的属性(包括坐标、长宽高或半径、航向等),并将边界框进行输出。
28、本发明提供了一种基于激光雷达与双目摄像头融合的3d目标检测方法及装置,该方法具有如下优点:
29、(1)本发明提出的3d目标检测方法充分考虑了点云和rgb图像的数据特征,根据深度学习与传统算法对数据处理的特征,采取传统算法对点云进行处理,处理的速度快、效率高,采取深度学习算法对rgb图像进行处理,目标识别精度高。
30、(2)本发明提出的3d目标检测方法结合了激光雷达和双目摄像头对行驶场景感知的优点,利用双目摄像头识别出目标类别,并将类别label标记给对应的障碍物点云簇,使得障碍物点云簇不仅具有三维、距离等信息,也具有种类信息,为后续决策提供了有力的信息支持。
31、(3)本发明提出的3d目标检测方法在研究了几种3d box建立方法的优缺点和适用对象之后,根据label选择不同的3d box建立的方法,使建立的3d box的边框更加接近实际目标对象、更加精确,对后续目标跟踪具有明显优势。
技术特征:
1.一种基于激光雷达与双目摄像头融合的3d目标检测方法,其特征在于,所述方法包括以下步骤:
2.根据权利要求1所述的基于激光雷达与双目摄像头融合的3d目标检测方法,其特征在于,所述步骤a具体包括以下步骤:
3.根据权利要求2所述的基于激光雷达与双目摄像头融合的3d目标检测方法,其特征在于,所述步骤a2选择平面标定法,采用matlab工具箱stereocalibrator进行双目摄像头的内参重新标定,标定完成后会得到cameraparameters1、cameraparameters2、translationofcamera2等参数,然后在驱动包里更改这些参数,即可获得较为准确的三维坐标点和二维像素点之间的矩阵转换关系。
4.根据权利要求1所述的基于激光雷达与双目摄像头融合的3d目标检测方法,其特征在于,所述步骤b具体包括以下步骤:
5.根据权利要求1所述的基于激光雷达与双目摄像头融合的3d目标检测方法,其特征在于,所述步骤c具体包括以下步骤:
6.根据权利要求1所述的基于激光雷达与双目摄像头融合的3d目标检测方法,其特征在于,所述步骤d具体包括:采用yolov3网络来建立分类预测模型,可以快速地识别出障碍物目标的具体类别。
7.根据权利要求1所述的基于激光雷达与双目摄像头融合的3d目标检测方法,其特征在于,所述步骤e具体包括以下步骤:
8.一种基于激光雷达与双目摄像头融合的3d目标检测装置,其特征在于,包括:
技术总结
本发明公开一种基于激光雷达与双目摄像头融合的3D目标检测方法,包括以下步骤:步骤A:对激光雷达与双目摄像头进行参数标定;步骤B:对激光雷达点云数据进行预处理;步骤C:对激光雷达点云进行地面分割、聚类;步骤D:建立目标分类预测模型;步骤E:进行3D目标匹配与检测。该基于激光雷达与双目摄像头融合的3D目标检测方法可实现对行驶环境中的障碍物的快速、准确检测,并具备很强的通用性。本申请还公开了一种基于激光雷达与双目摄像头融合的3D目标检测装置,同具有上述有益效果。
技术研发人员:郑平平,刘一霏,任甜,张倩
受保护的技术使用者:陕西汽车集团股份有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!