虚拟形象的控制方法、装置、设备及存储介质与流程
本公开实施例涉及计算机,尤其涉及一种虚拟形象的控制方法、装置、设备及存储介质。
背景技术:
1、随着虚拟现实(virtual reality,vr)技术的快速发展,用户通过佩戴vr设备体验虚拟世界已经成为比较常见的休闲娱乐方式。其中,通过佩戴vr设备来控制虚拟形象是其中一个重要的应用场景。现有技术中,在控制虚拟形象运动时,存在虚拟形象全身关节动作不自然的问题。
技术实现思路
1、本公开实施例提供一种虚拟形象的控制方法、装置、设备及存储介质,实现了对虚拟形象动作的控制,可以保证虚拟形象动作连贯自然,与用户实际动作保持基本一致。
2、第一方面,本公开实施例提供了一种虚拟形象的控制方法,包括:
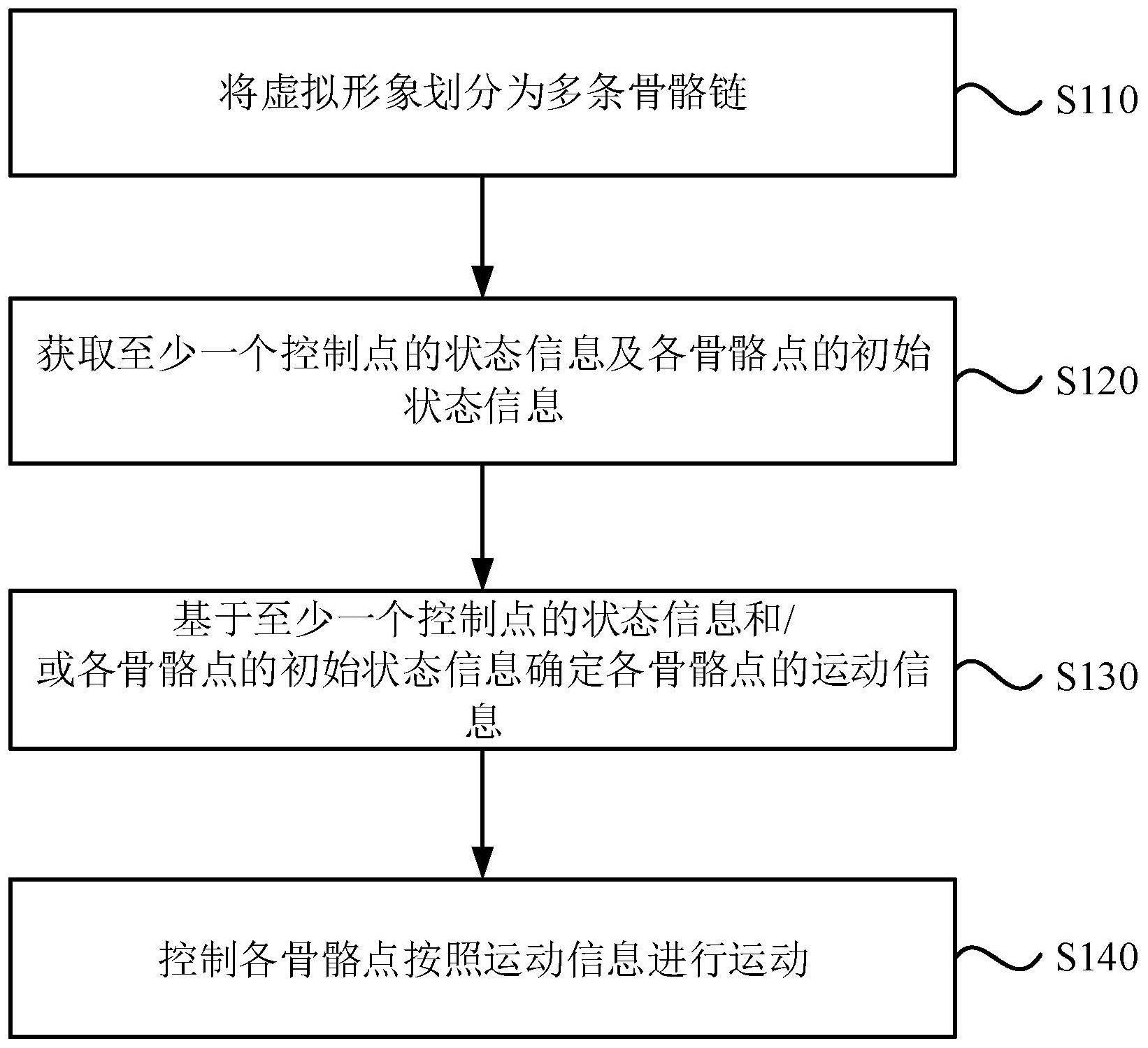
3、将虚拟形象划分为多条骨骼链;其中,每条骨骼链上包含多个骨骼点;
4、获取至少一个控制点的状态信息及各所述骨骼点的初始状态信息;其中,所述状态信息包括位置信息和朝向信息;
5、基于所述至少一个控制点的状态信息和/或所述各骨骼点的初始状态信息确定各所述骨骼点的运动信息;其中,所述运动信息包括平移信息和/或旋转信息;
6、控制各所述骨骼点按照所述运动信息进行运动。
7、第二方面,本公开实施例还提供了一种虚拟形象的控制装置,包括:
8、骨骼链划分模块,用于将虚拟形象划分为多条骨骼链;其中,每条骨骼链上包含多个骨骼点;
9、状态信息获取模块,用于获取至少一个控制点的状态信息及各所述骨骼点的初始状态信息;其中,所述状态信息包括位置信息和朝向信息;
10、运动信息确定模块,用于基于所述至少一个控制点的状态信息和/或所述各骨骼点的初始状态信息确定各所述骨骼点的运动信息;其中,所述运动信息包括平移信息和/或旋转信息;
11、控制模块,用于控制各所述骨骼点按照所述运动信息进行运动。
12、第三方面,本公开实施例还提供了一种电子设备,所述电子设备包括:
13、一个或多个处理装置;
14、存储装置,用于存储一个或多个程序;
15、当所述一个或多个程序被所述一个或多个处理装置执行,使得所述一个或多个处理装置实现如本公开实施例所述的虚拟形象的控制方法。
16、第四方面,本公开实施例还提供了一种计算机可读介质,其上存储有计算机程序,该程序被处理装置执行时实现如本公开实施例所述的虚拟形象的控制方法。
17、本公开实施例公开了一种虚拟形象的控制方法、装置、设备及存储介质。将虚拟形象划分为多条骨骼链;其中,每条骨骼链上包含多个骨骼点;获取至少一个控制点的状态信息及各骨骼点的初始状态信息;其中,状态信息包括位置信息和朝向信息;基于至少一个控制点的状态信息和/或各骨骼点的初始状态信息确定各骨骼点的运动信息;其中,运动信息包括平移信息和/或旋转信息;控制各骨骼点按照运动信息进行运动。本公开实施例提供的虚拟形象的控制方法,实现了对虚拟形象动作的控制,可以保证虚拟形象动作连贯自然,与用户实际动作保持基本一致。
技术特征:
1.一种虚拟形象的控制方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述骨骼链包括躯干骨骼链、两条手臂骨骼链及两条腿骨骼链;其中,所述躯干骨骼链包括头骨骼点及多个躯干骨骼点;手臂骨骼链包括肩膀骨骼点、大臂骨骼点、手肘骨骼点、小臂骨骼点及手腕骨骼点;腿骨骼链包括大腿骨骼点、膝盖骨骼点及脚踝骨骼点;所述控制点包括如下至少一项:手部控制点及头部控制点。
3.根据权利要求2所述的方法,其特征在于,对于所述多个躯干骨骼点,基于所述至少一个控制点的状态信息和/或所述各骨骼点的初始状态信息确定各所述骨骼点的运动信息,包括:
4.根据权利要求3所述的方法,其特征在于,根据所述躯干旋转信息确定所述多个躯干骨骼点的第一旋转信息,包括:
5.根据权利要求2或4所述的方法,其特征在于,对于头部骨骼点,基于所述至少一个控制点的状态信息和/或所述各骨骼点的初始状态信息确定各所述骨骼点的运动信息,包括:
6.根据权利要求5所述的方法,其特征在于,在控制所述头部骨骼点按照所述头部骨骼点的运动信息进行运动之后,还包括:
7.根据权利要求2或4所述的方法,其特征在于,对于手臂骨骼链上的肩膀骨骼点,基于所述至少一个控制点的状态信息和/或所述各骨骼点的初始状态信息确定各所述骨骼点的运动信息,包括:
8.根据权利要求7所述的方法,其特征在于,基于所述手部控制点的位置信息和所述肩膀骨骼点的初始位置信息确定所述肩膀骨骼点的目标朝向,包括:
9.根据权利要求8所述的方法,其特征在于,在根据投影后的连线确定所述肩膀骨骼点绕所述全局坐标系三个轴的旋转角度之后,还包括:
10.根据权利要求8所述的方法,其特征在在于,在根据投影后的连线确定所述肩膀骨骼点绕所述全局坐标系三个轴的旋转角度之后,还包括:
11.根据权利要求7所述的方法,其特征在于,在控制所述肩膀骨骼点旋转至所述目标朝向之后,还包括:
12.根据权利要求11所述的方法,其特征在于,所述目标平面信息由法向信息表征,确定手臂的目标平面信息,包括:
13.根据权利要求12所述的方法,其特征在于,根据第一大臂方向、第二大臂方向、手肘初始朝向及手部控制点的朝向确定手肘目标朝向,包括:
14.根据权利要求11所述的方法,其特征在于,在控制所述手肘骨骼点移动至所述目标位置之后,还包括:
15.根据权利要求14所述的方法,其特征在在于,根据所述第三旋转信息控制手肘骨骼点、小臂骨骼点及手腕骨骼点进行旋转,包括:
16.根据权利要求2所述的方法,其特征在于,对于腿骨骼链,基于所述至少一个控制点的状态信息和/或所述各骨骼点的初始状态信息确定各所述骨骼点的运动信息,包括:
17.根据权利要求16所述的方法,其特征在于,
18.一种虚拟形象的控制装置,其特征在于,包括:
19.一种电子设备,其特征在于,所述电子设备包括:
20.一种计算机可读介质,其上存储有计算机程序,其特征在于,该程序被处理装置执行时实现如权利要求1-17中任一所述的虚拟形象的控制方法。
技术总结
本公开实施例公开了一种虚拟形象的控制方法、装置、设备及存储介质。将虚拟形象划分为多条骨骼链;其中,每条骨骼链上包含多个骨骼点;获取至少一个控制点的状态信息及各所述骨骼点的初始状态信息;其中,所述状态信息包括位置信息和朝向信息;基于所述至少一个控制点的状态信息和/或所述各骨骼点的初始状态信息确定各所述骨骼点的运动信息;其中,所述运动信息包括平移信息和/或旋转信息;控制各所述骨骼点按照所述运动信息进行运动。本公开实施例提供的虚拟形象的控制方法,实现了对虚拟形象动作的控制,可以保证虚拟形象动作连贯自然,与用户实际动作保持基本一致。
技术研发人员:李亦彤
受保护的技术使用者:北京字跳网络技术有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!