一种仪表读数的无电气连接采集方法与流程
本发明属于轨道交通智能运维领域,涉及一种仪表读数的无电气连接采集方法。
背景技术:
1、轨道交通运维巡检是典型的劳动密集型行业,主要依靠人工检查,手写记录各项信息,根据经验制订维修计划,定期开展检查。其弊端是检修强度大、效率低、人工成本高、受天窗点影响,难以适应大规模城市轨道交通网络的可持续发展需求。然而,目前由于城市轨道交通的迅速发展,列车数量急剧上升,运行工况日趋复杂,随之而来的是列车运营间隔缩短、结束运营时间延长,这给维护保障带来了极大的压力。
2、目前,现场仪表设备仍依靠人工巡检、手工记录上报的形式。人工巡检作业方式落后、自动化程度低、成本高、覆盖率低、人力不足、受天窗点影响,且缺乏数据的积累和互通,这与智能运维发展中所要实现的巡检全覆盖、故障智能自动识别,并能提供可行解决方案的愿景相差甚远。
技术实现思路
1、基于此,针对现有窘况,本发明提出一种仪表读数的无电气连接采集方法,代替人工巡检并让相关人员实时掌握道轨道交通仪表的状态信息。
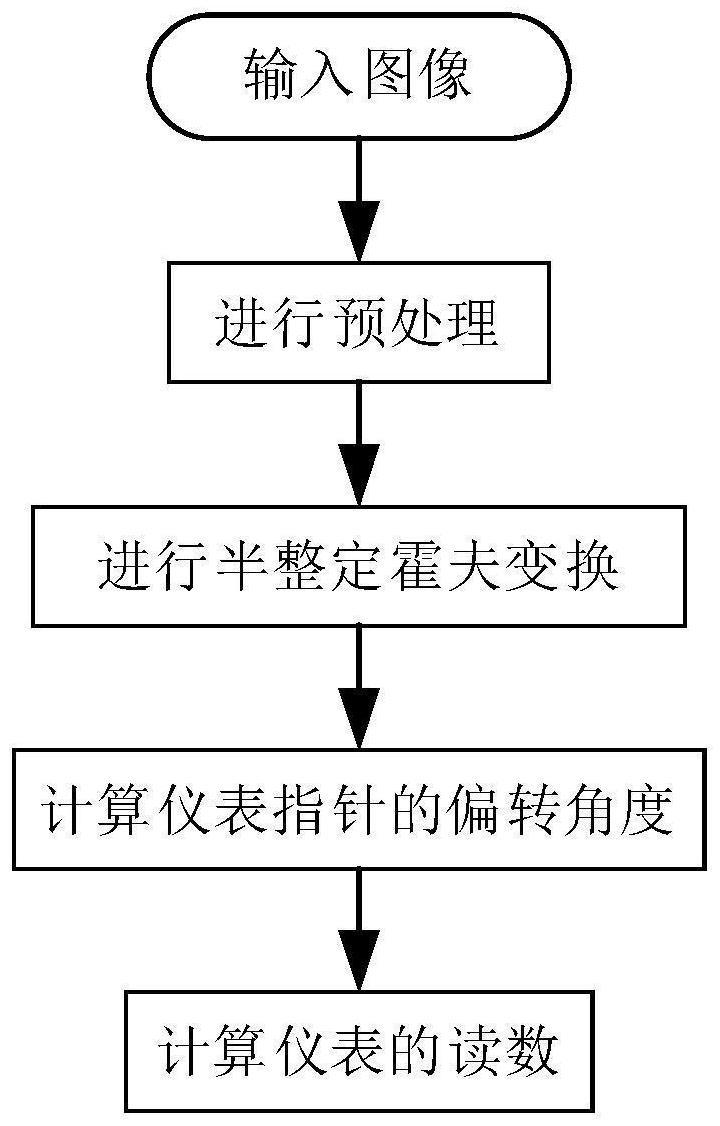
2、为了达到上述目的,本发明的解决方案是:采集仪表图像并预处理;对图像进行半整定霍夫变换,提取仪表指针;计算仪表指针的偏转角度,并计算该指针对应的仪表读数。
3、2、根据权利要求1所述的仪表读数的采集方法,其特征在于,所述步骤对图像进行半整定霍夫变换,提取仪表指针;具体包括以下步骤:
4、(a)在预处理后的图像中,人工选定唯一半整定点,并转换为霍夫空间的半整定方程,确定方程的容忍范围,形成半整定域;
5、(b)将预处理后图像中的边缘点转换至霍夫空间中,获得霍夫直线;
6、(c)遍历霍夫直线上的坐标,统计半整定域内的坐标频数,得到所有位于半整定域内的霍夫直线的交点;
7、(d)选取频数最高的两组坐标,分别计算各组坐标所代表的直线,并计算指针角度。
8、进一步地,所述步骤(a)中,在预处理后的图像中,人工选定唯一半整定点,并转换为霍夫空间的半整定方程,确定方程的容忍范围,形成半整定域,具体为:
9、仪表指针理论上始终绕着一点转动,选取该点作为唯一半整定点,选取该点在可容忍的半径内的圆为半整定域。预处理后,以半整定点作为坐标原点,该点水平向右为坐标轴的x轴,该点水平向下为坐标轴的y轴,记半整定点为(0,0),可容忍半径为d,则半整定域可表示为:
10、x2+y2≤d2
11、将半整定域的点(xi,yi)用极坐标表示,即:
12、xi=ρi cosθi,yi=ρi sinθi,ρi≤d
13、将该点转换至霍夫空间中,满足关系xi cosθ+yi sinθ=ρ,其中θ∈[0,2π),将极坐标带入得半整定域,
14、
15、其中,θi和θ取值无特异性,在区间[0,2π)任取即可。
16、进一步地,所述步骤(b)中,将预处理后图像中的边缘点转换至霍夫空间中,获得霍夫直线,具体为:
17、预处理后的图像为二值边缘图,边缘点处记为数值1,非边缘点处记为数值0。遍历二值边缘图中的数值为1的点,根据其像素坐标(xk,yk),转换至霍夫空间中,形成霍夫线簇:
18、xk cosθ+yk sinθ=ρ
19、其中,θ∈[0,2π),k∈[0,k],k为边缘点总数。
20、进一步地,所述步骤(c)中,遍历霍夫直线上的坐标,统计半整定域内的坐标频数,得到所有位于半整定域内的霍夫直线的交点,具体为:
21、根据θ∈[0,2π),k∈[0,k],对k和θ进行遍历,形成霍夫坐标(θk,ρk),将坐标带入半整定域方程中,即:
22、
23、遍历θ∈[0,2π),若不满足maxρi≤d,则舍去该边缘点。
24、进一步地,所述步骤(d)选取频数最高的两组坐标,分别计算各组坐标所代表的直线,并计算指针角度,具体为:
25、选定统计步长△ρ,以步长△ρ对ρ进行频数统计,统计出频数最高的两个霍夫坐标参数分组ρm和ρn,分别代表指针的两条边缘线。提取所述两个分组中的霍夫坐标(θm,k,ρm,k)和(θn,k,ρn,k),可知霍夫坐标在霍夫直线簇中的序号k,由此得到像素坐标(xk,yk)。统计各组像素坐标形成的角度,即仪表指针两条边缘线与x轴的夹角。对两个夹角的数值求平均值,即为仪表指针的偏转角度。根据偏转角和刻度数值的函数关系,求得指针对应的读数。
技术特征:
1.一种仪表读数的无电气连接采集方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的仪表读数的采集方法,其特征在于,所述步骤s2,对图像进行半整定霍夫变换,计算仪表指针的偏转角度;具体包括以下步骤:
技术总结
本发明涉及一种仪表读数的无电气连接采集方法,包括以下步骤:采集仪表图像并预处理;对图像进行半整定霍夫变换,计算仪表指针的偏转角度;计算该指针对应的仪表读数。
技术研发人员:邓辰鑫,薛腾辉,沈阳,惠青文,李柏松,张国光
受保护的技术使用者:上海泽高电子工程技术股份有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!