深度估计模型优化与物体距离检测方法及相关设备与流程
本申请涉及图像检测,特别是指一种深度估计模型优化与物体距离检测方法及相关设备。
背景技术:
1、在对物体进行距离检测时,可以通过获取物体图像对应的深度图像来确定物体与摄像装置之间的距离。目前的机器学习算法难以获得准确的深度信息,预测距离与实际距离之间的误差较大。
技术实现思路
1、鉴于以上内容,有必要提供一种深度估计模型优化与物体距离检测方法及相关设备,能够使用雷达装置获得的准确深度信息对初始深度估计模型进行优化迭代,可以提高物体距离检测的准确性。
2、所述深度估计模型优化方法包括:
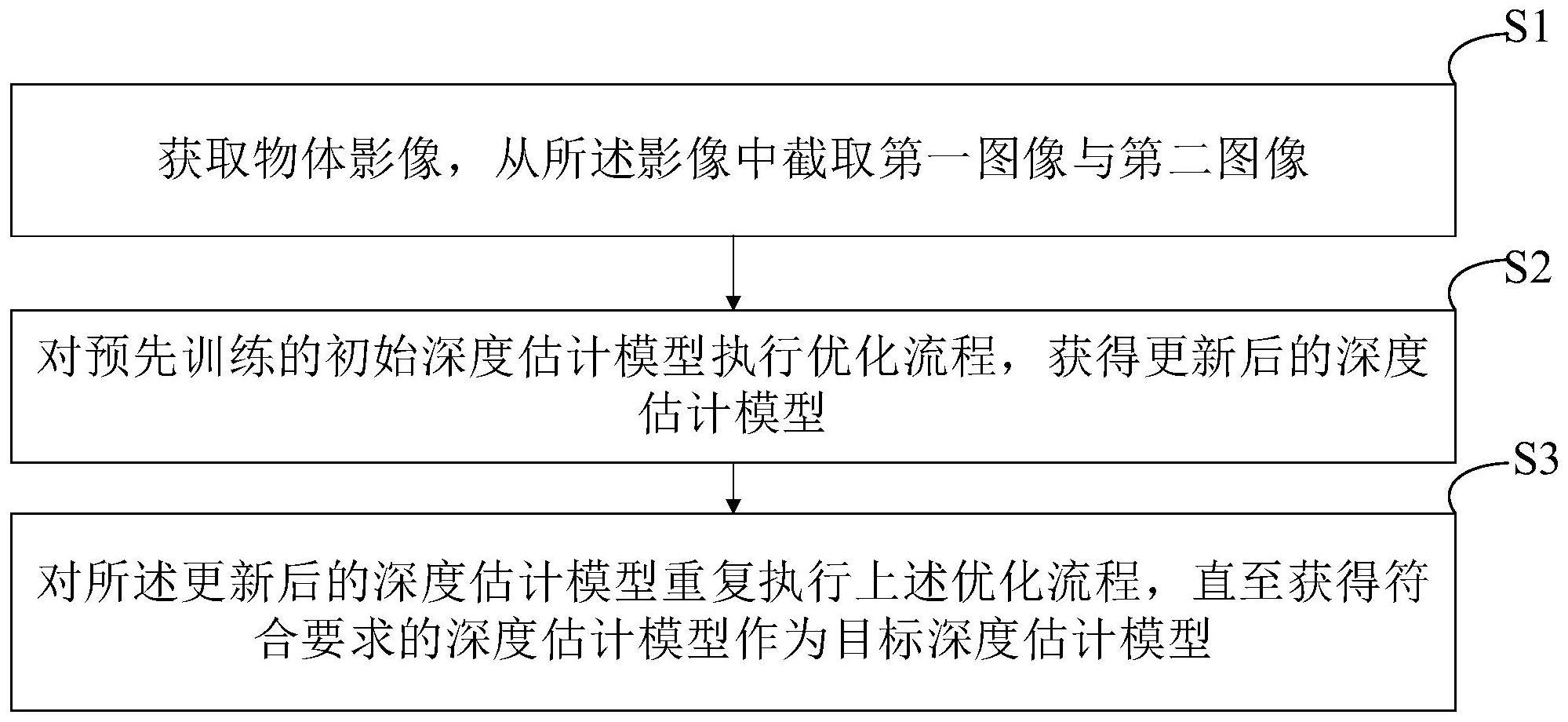
3、获取物体影像,从所述影像中截取第一图像与第二图像;
4、对预先训练的初始深度估计模型执行优化流程,获得更新后的深度估计模型,所述优化流程包括:
5、利用所述初始深度估计模型获得所述第一图像的第一深度图像:
6、获取所述第一图像中的每个像素点与所述第二图像中的每个像素点之间的对应关系;
7、对所述第一深度图像进行反向投影,获得所述第一图像的第三图像;
8、根据所述对应关系,将所述第三图像中的每个像素点的像素值更新为所述第二图像中对应的像素点的像素值,获得第四图像;
9、基于所述初始深度估计模型获取所述第一图像与所述第四图像之间的初始损失函数;
10、利用雷达装置分别获取所述第一图像与所述第四图像中每个像素点的深度值,基于所述深度值优化所述初始损失函数,获得更新后的损失函数;
11、利用所述更新后的损失函数优化所述初始深度估计模型,获得更新后的深度估计模型;
12、对所述更新后的深度估计模型重复执行上述优化流程,直至获得符合要求的深度估计模型作为目标深度估计模型。
13、可选地,所述获取物体影像,从所述影像中截取第一图像与第二图像包括:
14、利用摄像装置获取所述物体影像,从所述物体影像中获取所述物体的不同视角的两帧图像作为所述第一图像与所述第二图像。
15、可选地,所述获取所述第一图像中的像素点与所述第二图像中的像素点之间的对应关系包括:
16、计算所述第一图像与所述第二图像之间的位姿转换关系,根据所述位姿转换关系计算所述对应关系。
17、可选地,计算所述第一图像与所述第二图像之间的位姿转换关系包括:
18、利用图像特征点提取算法和图像特征匹配算法,获取预设数量对的匹配点,每对匹配点包括所述第一图像的特征点与所述第二图像中对应的特征点;
19、基于三角测量方法,利用所述预设数量对的匹配点,获得每个所述第一图像的特征点与每个所述第二图像中的特征点的三维空间坐标;
20、基于perspective-n-point算法,利用所述三维空间坐标计算获取所述物体影像的摄像装置拍摄所述第一图像时的第一相机位姿,以及所述摄像装置拍摄所述第二图像时的第二相机位姿;
21、根据所述第一相机位姿和所述第二相机位姿计算所述位姿转换关系。
22、可选地,基于所述初始深度估计模型获取所述第一图像与所述第四图像之间的损失函数包括:
23、将所述第四图像输入所述初始深度模型,获得所述第四图像的第四深度图像;
24、计算所述第一深度图像与所述第四深度图像中对应像素点之间的初始深度差值,基于所述初始深度差值构建所述损失函数,所述损失函数包括所述第一深度图像与所述第四深度图像的结构相似性。
25、可选地,所述基于所述深度值优化所述损失函数包括:
26、计算所述第一图像的每个像素点的深度值与所述第四图像中对应像素点的深度值之间的校准后的深度差值;
27、利用所述校准后的深度差值作为所述损失函数的优化目标对所述损失函数进行优化。
28、可选地,所述方法还包括:
29、当所述更新后的损失函数收敛至预设的阈值范围时,确定所述更新后的深度估计模型符合要求。
30、所述物体距离检测方法包括:利用摄像装置获取物体图像,将所述物体图像输入至目标深度估计模型,所述目标深度估计模型为所述深度估计模型优化方法所获得;
31、从所述目标深度估计模型获得输出的深度图像,基于所述深度图像中每个像素点的像素值,确定所述物体与所述摄像装置的距离。
32、所述计算机可读存储介质存储有至少一个指令,所述至少一个指令被处理器执行时实现所述深度估计模型优化方法或所述物体距离检测方法。
33、所述计算机装置包括存储器和至少一个处理器,所述存储器中存储有至少一个指令,所述至少一个指令被所述至少一个处理器执行时实现所述深度估计模型优化方法或所述物体距离检测方法。
34、相较于现有技术,所述深度估计模型优化和物体距离检测方法及相关设备,能使用雷达装置获得的准确深度信息对初始深度估计模型的损失函数进行优化迭代,获得的目标深度估计模型可以提高物体距离检测的准确性,尤其是应用在智能驾驶领域时,可通过对距离的准确判定,有效提高用户驾驶车辆时的行车安全。
技术特征:
1.一种深度估计模型优化方法,应用于计算机装置,其特征在于,所述方法包括:
2.根据权利要求1所述的深度估计模型优化方法,其特征在于,所述获取物体影像,从所述影像中截取第一图像与第二图像包括:
3.根据权利要求1所述的深度估计模型优化方法,其特征在于,所述获取所述第一图像中的像素点与所述第二图像中的像素点之间的对应关系包括:
4.根据权利要求3所述的深度估计模型优化方法,其特征在于,计算所述第一图像与所述第二图像之间的位姿转换关系包括:
5.根据权利要求1所述的深度估计模型优化方法,其特征在于,基于所述初始深度估计模型获取所述第一图像与所述第四图像之间的损失函数包括:
6.根据权利要求5所述的深度估计模型优化方法,其特征在于,所述基于所述深度值优化所述损失函数包括:
7.根据权利要求1所述的深度估计模型优化方法,其特征在于,所述方法还包括:
8.一种物体距离检测方法,其特征在于,所述方法包括:
9.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有至少一个指令,所述至少一个指令被处理器执行时实现如权利要求1至7中任意一项所述的深度估计模型优化方法,或实现如权利要求8所述的物体距离检测方法。
10.一种计算机装置,其特征在于,该计算机装置包括存储器和至少一个处理器,所述存储器中存储有至少一个指令,所述至少一个指令被所述至少一个处理器执行时实现如权利要求1至7中任意一项所述的深度估计模型优化方法,或实现如权利要求8所述的物体距离检测方法。
技术总结
本申请提供一种深度估计模型优化和物体距离检测方法及相关设备,所述方法包括:利用初始深度估计模型获得第一图像的第一深度图像;获取第一图像中的每个像素点与第二图像中的每个像素点之间的对应关系;将第三图像中的像素值更新为第二图像中对应的像素点的像素值获得第四图像;基于初始深度估计模型获取第一图像与第四图像之间的初始损失函数;利用雷达装置获取所述第一图像与所述第四图像中每个像素点的深度值,基于深度值获得更新后的损失函数;利用更新后的损失函数优化初始深度估计模型,直至获得目标深度估计模型;将物体图像输入至目标深度估计模型,从目标深度估计模型获得输出的深度图像。本申请可以提高物体距离检测的准确性。
技术研发人员:刘宗玮,郭锦斌
受保护的技术使用者:鸿海精密工业股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!