一种基于标识物检测的目标区域判定方法与流程
1.本发明涉及目标检测识别技术领域,特别是涉及一种基于标识物检测的目标区域判定方法。
背景技术:
2.现有目标识别算法如区域入侵、离岗、人员清点等大部分均需要固定相机安装位置及角度以确定识别区域(即相机拍摄到的区域),当相机发生偏移需要重新对识别区域进行标注,这种传统的方法不仅耗费人力物力,而且通过人工方法调整相机拍摄到的识别区域,精确度也不够高。
3.伴随着信息化技术和图像处理方法的日益更新,急需寻找一种方法能够有效确定识别区域,只有这样,当相机发生运动时,其拍摄到的识别区域也能跟着一起更新。
技术实现要素:
4.本发明所要解决的技术问题是提供一种基于标识物检测的目标区域判定方法,能够借助标识物在一定位置及角度的变化范围内自动调整识别区域的位置。
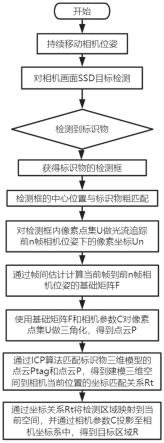
5.本发明解决其技术问题所采用的技术方案是:提供一种基于标识物检测的目标区域判定方法,包括:
6.步骤(1):在三维模型空间中建立标识物与目标区域的位置关系,所述目标区域为相机拍摄到的区域;
7.步骤(2):通过目标检测网络对相机在不同位姿下拍摄的n+1帧图像进行标识物检测,其中,第n+1帧图像带有完整的标识物,所述目标检测网络设置有用于检测标识物的检测框;
8.步骤(3):将第n+1帧图像的检测框中心与标识物进行匹配;
9.步骤(4):基于第n+1帧图像检测框内的像素点集u,获取前n帧相机在不同位姿下的像素坐标un;
10.步骤(5):根据所述像素点集u和像素坐标un,计算第n+1帧到前n帧相机位姿的基础矩阵f;
11.步骤(6):根据所述基础矩阵f和相机参数c对像素点集u进行三角化,得到点云p;其中,所述点云p对应实际空间中的标识物;
12.步骤(7):将标识物在三维模型空间的点云ptag和点云p进行匹配,得到三维模型空间与实际空间的坐标匹配关系rt;
13.步骤(8):根据所述坐标匹配关系rt将三维模型空间的检测区域映射到实际空间中,得到实际空间的检测区域,并通过相机参数c将实际空间的检测区域投影至相机坐标系中,得到目标区域r。
14.所述步骤(2)中的目标检测网络检测网络为ssd网络。
15.所述步骤(4)具体为:对第n+1帧图像检测框内像素点集u进行光流追踪,得到前n
帧相机在不同位姿下的像素坐标un。
16.所述步骤(7)通过icp算法将标识物在三维模型空间的点云ptag和点云p进行匹配,得到三维模型空间与实际空间的坐标匹配关系rt。
17.有益效果
18.由于采用了上述的技术方案,本发明与现有技术相比,具有以下的优点和积极效果:本发明提供的区域判定方法能够借助标识物在一定位置及角度的变化范围内自动调整识别区域的位置,本发明能够应用于机器人视觉等更灵活的可动相机场景。
附图说明
19.图1是本发明实施方式的方法流程图;
20.图2是本发明实施方式的三维模型空间标识物与目标区域的位置关系图。
具体实施方式
21.下面结合具体实施例,进一步阐述本发明。应理解,这些实施例仅用于说明本发明而不用于限制本发明的范围。此外应理解,在阅读了本发明讲授的内容之后,本领域技术人员可以对本发明作各种改动或修改,这些等价形式同样落于本申请所附权利要求书所限定的范围。
22.本发明的实施方式涉及一种基于标识物检测的目标区域判定方法,请参阅图1,包括:
23.步骤(1):在三维模型空间中建立标识物与目标区域r的位置关系,所述目标区域r为相机拍摄到的区域,详见图2;
24.步骤(2):通过目标检测网络对相机在不同位姿下拍摄的n+1帧图像进行标识物检测,其中,第n+1帧图像带有完整的标识物,所述目标检测网络设置有用于检测标识物的检测框;
25.所述步骤(2)中的目标检测网络检测网络为ssd网络,ssd网络的运行速度快,检测精度高,能够适用于实时图像检测;
26.步骤(3):将第n+1帧图像的检测框中心与标识物进行匹配;
27.步骤(4):基于第n+1帧图像检测框内的像素点集u,获取前n帧相机在不同位姿下的像素坐标un;其中,像素坐标un指前n帧中每一帧检测框的像素点集;
28.所述步骤(4)具体为:对第n+1帧图像检测框内像素点集u进行光流追踪,得到前n帧相机在不同位姿下的像素坐标un;
29.步骤(5):从所述像素坐标un中选取一帧图像的像素点集,并结合所述像素点集u,计算第n+1帧到前n帧相机位姿的基础矩阵f;
30.步骤(6):根据所述基础矩阵f和相机参数c(即相机内参矩阵)对像素点集u进行三角化,得到点云p,三角化为现有技术,此处不再赘述;其中,所述点云p对应实际空间中的标识物;
31.步骤(7):将标识物在三维模型空间的点云ptag和点云p进行匹配,得到三维模型空间(即相机在三维模型空间的位置)与实际空间(即相机当前位置)的坐标匹配关系rt;
32.所述步骤(7)通过icp算法将标识物在三维模型空间的点云ptag和点云p进行匹
配,得到三维模型空间与实际空间的坐标匹配关系rt;
33.步骤(8):根据所述坐标匹配关系rt将三维模型空间中的检测区域映射到实际空间中,得到实际空间的检测区域,并通过相机参数c将实际空间的检测区域投影至相机坐标系中,得到目标区域r,该目标区域r为相机拍摄的图像中的区域。
34.前述对本发明的具体示例性实施方案的描述是为了说明和例证的目的。这些描述并非想将本发明限定为所公开的精确形式,并且很显然,根据上述教导,可以进行很多改变和变化。对示例性实施例进行选择和描述的目的在于解释本发明的特定原理及其实际应用,从而使得本领域的技术人员能够实现并利用本发明的各种不同的示例性实施方案以及各种不同的选择和改变。本发明的范围意在由权利要求书及其等同形式所限定。
技术特征:
1.一种基于标识物检测的目标区域判定方法,其特征在于,包括:步骤(1):在三维模型空间中建立标识物与目标区域的位置关系,所述目标区域为相机拍摄到的区域;步骤(2):通过目标检测网络对相机在不同位姿下拍摄的n+1帧图像进行标识物检测,其中,第n+1帧图像带有完整的标识物,所述目标检测网络设置有用于检测标识物的检测框;步骤(3):将第n+1帧图像的检测框中心与标识物进行匹配;步骤(4):基于第n+1帧图像检测框内的像素点集u,获取前n帧相机在不同位姿下的像素坐标un;步骤(5):根据所述像素点集u和像素坐标un,计算第n+1帧到前n帧相机位姿的基础矩阵f;步骤(6):根据所述基础矩阵f和相机参数c对像素点集u进行三角化,得到点云p;其中,所述点云p对应实际空间中的标识物;步骤(7):将标识物在三维模型空间的点云ptag和点云p进行匹配,得到三维模型空间与实际空间的坐标匹配关系rt;步骤(8):根据所述坐标匹配关系rt将三维模型空间的检测区域映射到实际空间中,得到实际空间的检测区域,并通过相机参数c将实际空间的检测区域投影至相机坐标系中,得到目标区域r。2.根据权利要求1所述的基于标识物检测的目标区域判定方法,其特征在于,所述步骤(2)中的目标检测网络检测网络为ssd网络。3.根据权利要求1所述的基于标识物检测的目标区域判定方法,其特征在于,所述步骤(4)具体为:对第n+1帧图像检测框内像素点集u进行光流追踪,得到前n帧相机在不同位姿下的像素坐标un。4.根据权利要求1所述的基于标识物检测的目标区域判定方法,其特征在于,所述步骤(7)通过icp算法将标识物在三维模型空间的点云ptag和点云p进行匹配,得到三维模型空间与实际空间的坐标匹配关系rt。
技术总结
本发明涉及一种基于标识物检测的目标区域判定方法,包括:在三维模型空间中建立标识物与目标区域的位置关系;通过目标检测网络对n+1帧图像进行标识物检测;将第n+1帧图像的检测框中心与标识物进行匹配;基于像素点集U,获取前n帧相机的像素坐标Un;根据像素点集U和像素坐标Un,计算基础矩阵F;根据基础矩阵F和相机参数C对像素点集U进行三角化,得到点云P;将标识物在三维模型空间的点云Ptag和点云P进行匹配,坐标匹配关系Rt;根据坐标匹配关系Rt将三维模型空间的检测区域映射到实际空间中,并通过相机参数C将实际空间的检测区域投影至相机坐标系中,得到目标区域R。本发明能够借助标识物自动调整识别区域的位置。识物自动调整识别区域的位置。识物自动调整识别区域的位置。
技术研发人员:崔晓涛
受保护的技术使用者:上海檀索科技有限公司
技术研发日:2022.06.22
技术公布日:2022/9/15
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1