CBCT旋转半径的测量方法、装置、设备及存储介质与流程
本申请涉及医疗设备,尤其涉及一种cbct旋转半径的测量方法、装置、设备及存储介质。
背景技术:
1、锥形束电子计算机断层扫描(cone-beam-computed-tomography,简称cbct),由于其摆位灵活、操作方便、比螺旋ct的辐射剂量小,因此被广泛应用于多种手术中,比如辅助引导质子肿瘤治疗、影像导航机器人手术等。在将术前锥形束ct引入到手术过程中,确定cbct的内参是至关重要的,然而受cbct的使用过程以及其机械结构的特殊化影响,cbct的内参并不是固定不变的,并且cbct拍摄图像容易存在畸变。
2、目前在将术前用于病情诊断的锥形束ct图像用于规划手术方案并引入到手术导航过程中时,虽然cbct内参和图像畸变参数可以通过相机标定的方式来获取,但是对于cbct旋转中心和cbct旋转半径却没有已知方法来获得。然而,该参数对于cbct和其他模态融合来说却十分重要。因此,亟需一种能够快速、高效、便捷地获取cbct旋转半径的方案。
技术实现思路
1、有鉴于此,本申请实施例提供了一种cbct旋转半径的测量方法、装置、设备及存储介质,以解决现有技术存在的无法快速、高效、便捷地获得cbct旋转半径的问题。
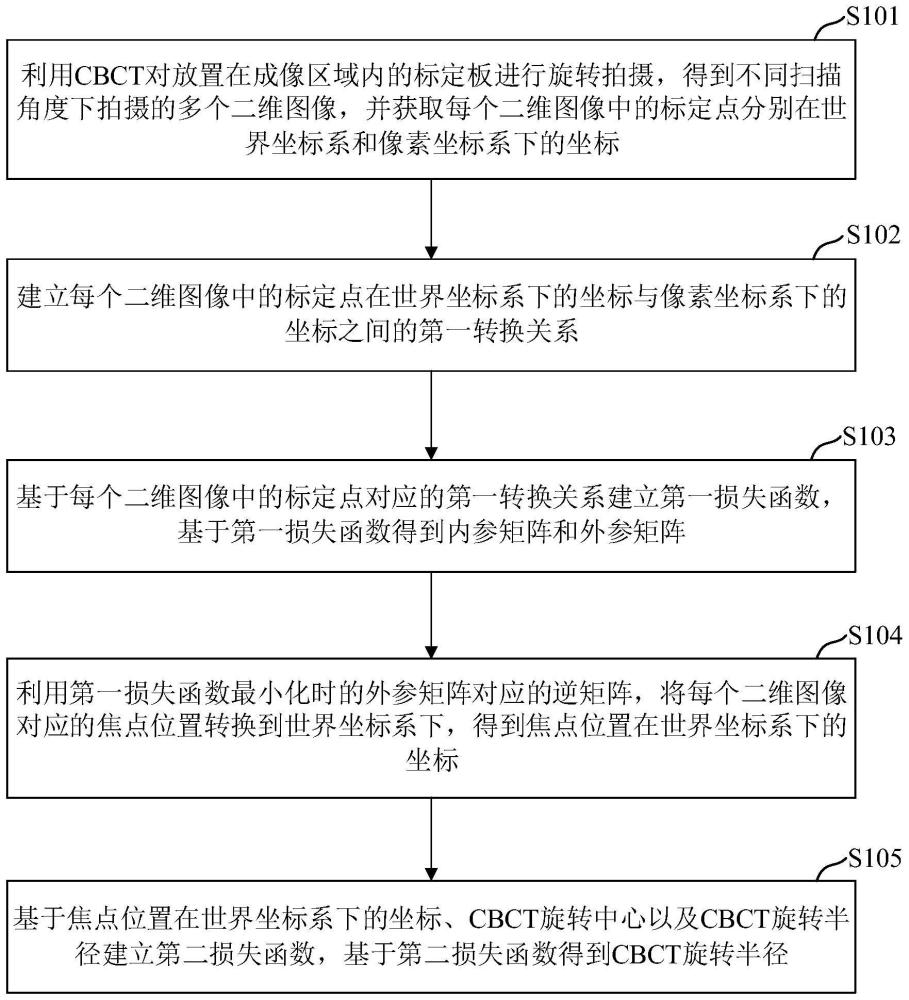
2、本申请实施例的第一方面,提供了一种cbct旋转半径的测量方法,包括:利用cbct对放置在成像区域内的标定板进行旋转拍摄,得到不同扫描角度下拍摄的多个二维图像,并获取每个二维图像中的标定点分别在世界坐标系和像素坐标系下的坐标;建立每个二维图像中的标定点在世界坐标系下的坐标与像素坐标系下的坐标之间的第一转换关系;基于每个二维图像中的标定点对应的第一转换关系建立第一损失函数,基于第一损失函数得到内参矩阵和外参矩阵;利用外参矩阵对应的逆矩阵,将每个二维图像对应的焦点位置转换到世界坐标系下,得到焦点位置在世界坐标系下的坐标;基于焦点位置在世界坐标系下的坐标、cbct旋转中心以及cbct旋转半径建立第二损失函数,基于第二损失函数得到cbct旋转半径。
3、本申请实施例的第二方面,提供了一种cbct旋转半径的测量装置,包括:拍摄模块,被配置为利用cbct对放置在成像区域内的标定板进行旋转拍摄,得到不同扫描角度下拍摄的多个二维图像,并获取每个二维图像中的标定点分别在世界坐标系和像素坐标系下的坐标;建立模块,被配置为建立每个二维图像中的标定点在世界坐标系下的坐标与像素坐标系下的坐标之间的第一转换关系;第一拟合模块,被配置为基于每个二维图像中的标定点对应的第一转换关系建立第一损失函数,基于第一损失函数得到内参矩阵和外参矩阵;转换模块,被配置为利用第一损失函数最小化时的外参矩阵对应的逆矩阵,将每个二维图像对应的焦点位置转换到世界坐标系下,得到焦点位置在世界坐标系下的坐标;第二拟合模块,被配置为基于焦点位置在世界坐标系下的坐标、cbct旋转中心以及cbct旋转半径建立第二损失函数,基于第二损失函数得到cbct旋转半径。
4、本申请实施例的第三方面,提供了一种电子设备,包括存储器,处理器及存储在存储器上并可在处理器上运行的计算机程序,处理器执行程序时实现上述方法的步骤。
5、本申请实施例的第四方面,提供了一种计算机可读存储介质,该计算机可读存储介质存储有计算机程序,该计算机程序被处理器执行时实现上述方法的步骤。
6、本申请实施例采用的上述至少一个技术方案能够达到以下有益效果:
7、通过利利用cbct对放置在成像区域内的标定板进行旋转拍摄,得到不同扫描角度下拍摄的多个二维图像,并获取每个二维图像中的标定点分别在世界坐标系和像素坐标系下的坐标;建立每个二维图像中的标定点在世界坐标系下的坐标与像素坐标系下的坐标之间的第一转换关系;基于每个二维图像中的标定点对应的第一转换关系建立第一损失函数,基于第一损失函数得到内参矩阵和外参矩阵;利用外参矩阵对应的逆矩阵,将每个二维图像对应的焦点位置转换到世界坐标系下,得到焦点位置在世界坐标系下的坐标;基于焦点位置在世界坐标系下的坐标、cbct旋转中心以及cbct旋转半径建立第二损失函数,基于第二损失函数得到cbct旋转半径。本申请利用cbct的内参和外参标定过程来直接测量得到cbct的旋转半径,不仅可以快速、高效、便捷地获得cbct旋转半径,而且经测量得到的cbct旋转半径精度高,测量结果的准确性高。
技术特征:
1.一种cbct旋转半径的测量方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述利用cbct对放置在成像区域内的标定板进行旋转拍摄,得到不同扫描角度下拍摄的多个二维图像,包括:
3.根据权利要求1所述的方法,其特征在于,所述建立每个所述二维图像中的标定点在所述世界坐标系下的坐标与在所述像素坐标系下的坐标之间的第一转换关系,包括:
4.根据权利要求3所述的方法,其特征在于,将所述第二转换关系、所述第三转换关系和所述第四转换关系进行整合得到所述第一转换关系,包括:
5.根据权利要求1所述的方法,其特征在于,将基于所述第一转换关系建立的所述第一损失函数表示为:
6.根据权利要求1所述的方法,其特征在于,将基于所述焦点位置在世界坐标系下的坐标、cbct旋转中心以及cbct旋转半径建立的所述第二损失函数表示为:
7.根据权利要求1所述的方法,其特征在于,基于所述焦点位置在世界坐标系下的坐标、cbct旋转中心以及cbct旋转半径建立第二损失函数,基于所述第二损失函数得到cbct旋转半径,包括:
8.一种cbct旋转半径的测量装置,其特征在于,包括:
9.一种电子设备,包括存储器,处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现权利要求1至7中任一项所述的方法。
10.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至7中任一项所述的方法。
技术总结
本申请提供了一种CBCT旋转半径的测量方法、装置、设备及存储介质。该方法包括:利用CBCT拍摄标定板得到多个二维图像,获取每个二维图像中的标定点在世界坐标系和像素坐标系下的坐标;建立标定点在世界坐标系下的坐标与像素坐标系下的坐标之间的第一转换关系;基于每个二维图像中的标定点对应的第一转换关系建立第一损失函数,得到内参矩阵和外参矩阵;利用外参矩阵对应的逆矩阵,将每个二维图像对应的焦点位置转换到世界坐标系下,得到焦点位置在世界坐标系下的坐标;基于焦点位置在世界坐标系下的坐标、CBCT旋转中心以及CBCT旋转半径建立第二损失函数,得到CBCT旋转半径。本申请可以快速、高效、便捷地获取CBCT旋转半径,提高CBCT旋转半径的测量精度。
技术研发人员:姜丽丽
受保护的技术使用者:北京天智航医疗科技股份有限公司
技术研发日:
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!