一种基于YOLO的油田作业现场自适应检测方法及系统
本发明属于计算机视觉领域和迁移学习领域,具体涉及一种基于yolov5的领域自适应目标检测方法及系统。
背景技术:
1、近年来,油田作业现场基本实现了视频监控的全覆盖,数字化油田建设进程不断加快,智能视频监控在油田作业现场的应用成为一个热点问题.普通监控摄像头主要用于对所发生事件的实时机械记录,只能实时显示监控画面以及视频录像保存,有时无法察觉安全危险,从而导致漏报现象的发生.而在危险发生时,能否及时发现和告警将直接关系到人身安全和财产安全.因此,应用智能化的视频监控技术识别和分析作业现场违章行为和安全隐患,快速对突发事件做出反应,从而减少对油田造成的损失显得极为重要.
2、虽然目标检测在基准数据集上取得了优异的性能,但其性能主要依赖大量的标注数据,并且要求训练数据和测试数据处于相同的分布。而在实际部署过程中,我们往往无法保证训练数据与真实部署环境处于相同的分布。所以,油田实际部署过程中面临着巨大的挑战.因为现实环境是非可控的,环境条件的变化、摄像机角度以及拍摄距离等都可能会导致域偏移,使训练好的模型无法达到预期效果,模型精度大幅度下降,从而阻碍模型在真实环境中的部署。而针对每一个环境重新收集和制作数据集往往要耗费巨大的人力物力,借助此系统可以减少数据标注花费的大量人力和物力,提升在新场景下模型检测精度提升油田作业现场管理效率,减少生产管理的成本,提升管理质量。
技术实现思路
1、本发明的目的是在于针对数据集标注繁琐费力,针对特点场景的模型难以直接应用到新场景。提供了一种基于yolov5的油田作业现场领域自适应目标检测方法及系统,在不需要额外人工标注的情况下,提升模型在新场景下的检测精度。
2、为了实现上述目的,本发明采用下述技术方案:
3、(1)收集制作油田现场目标检测数据集;
4、(2)构建域自适应yolov5目标检测模型;
5、(3)利用源域数据对模型进行训练优化;
6、(4)混合源域和目标域数据,实现领域知识的迁移;
7、(5)根据检测结果进行违归判定,并对检测结果进行展示和保存。
8、本发明进一步的改进在于,步骤(1)的具体实现步骤为:
9、(101)收集油田作业现场视频数据,抽帧转换为图片数据。
10、(102)源域数据集来自相机拍摄的油田作业现场图片。并通过labelimg标注工具对待检测目标进行了标注。
11、(103)目标域数据集来自油田作业现场实际摄像头视频,通过分帧工具将视频流数据转换图片数据,源域数据全部用于训练集,目标域数据按照8:2的比例随机划分为训练集与测试集。
12、本发明进一步的改进在于,步骤(2)的具体实现步骤为:
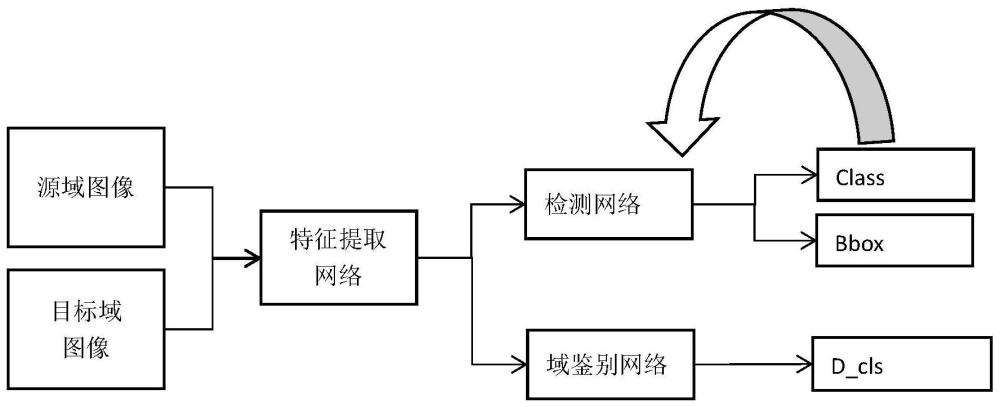
13、(201)构建原始yolov5网络;
14、(202)在主干网络后添加一个域鉴别分支。
15、(203)域鉴别分支对输入数据进行分类,并通过梯度反转层(grl)反转梯度方向,使模型能够学习到领域不变特征。
16、本发明进一步的改进在于,步骤(4)的具体实现步骤为:
17、(301)将数据集划分为已经完成标注的源域数据集和要部署场景下未进行标注的目标域数据集;
18、(302)使用pytorch深度学习框架构建域自适应yolov5检测模型;
19、(303)利用源域数据训练得到初始检测模型;预训练模型使用yolov5l.pt,在初始训练中仅使用源域数据,最大迭代次数设为8000;学习率初始化为0.01,第50轮将其降低到0.001,在第100轮将其降低到0.0001;动量设置为0.9,权重衰减为0.0001;
20、(304)利用检测模型对目标域数据进行预测;
21、(305)对检测网络和域鉴别网络进行训练优化;
22、(306)重复(304)、(305)直到模型收敛,得到最终检测模型。
23、进一步的,所述的基于yolov5的领域自适应目标检测方法,其特征在于,所述模型使用密集连接代替残差连接,不仅可以减少梯度消失问题的产生,同时,还可以起到正则化效果,防止过拟合。此外,损失函数除了yolov5的检测损失之外还添加了域分类损失:
24、l=ldet+λld
25、ldet=lcls+lobj+lbox
26、ld=dlog(p)+(1-d)log(1-p)
27、进一步的,为了更好地实现源域知识向目标域知识的迁移,我们在域分类网络引入了额外的残差注意力模块。
28、本发明还提供了一种基于yolov5油田作业现场违章检测系统,其特征在于,包括用户管理模块,用于管理用户账号和设置用户权限;违规检测模块,用于对作业现场打手机、不穿工衣、不戴安全帽等违规行为进行检测;智能管理模块,用于保存和发送检测结果;信息管理模块,用于对检测结果、用户信息进行管理。
29、本发明至少具有如下有益的技术效果:
30、第一,在时间效率上,采用本发明可以通过比,自动实时识别和分析作业现场违章行为和安全隐患,快速对突发事件做出反应;
31、第二,在应用成本上,本发明使用计算机视觉与深度学习技术,通过服务器端连接生产作业现场现有的摄像头,通过轮询算法,一台计算机管理1000个摄像头,轮询一次大约五分钟,实现采油作业现场快速智能化检测。不必增加额外的标注成本,减少数据标注花费的大量人力和物力;
32、第三,在应用效果上,采用本发明可以针对实际应用场景,收集数据集对模型知识进行迁移而无需进行繁琐的数据标注,从而保证在新的场景下检测的性能。
33、此外,使用本发明可以记录违章摄像头编号、画面以及时间等信息,对违章行为进行展示和存储,方便后续的查找和存档。
34、本发明附加的方面和优点将在下面的描述中部分给出,这些将从下面的描述中变得明显,或通过本发明的实践了解到。
技术特征:
1.一种基于yolov5的领域自适应目标检测算法,其特征在于,在原有的数据集和cnn神经网络上,使用对抗性学习和self-training方法,学习源域和目标域的通用特征表示,同时在领域自适应阶段引入残差注意力模块,提高深度学习模型的迁移能力和实际场景下的精度。包括:
2.根据权利要求1所述的一种基于yolov5的领域自适应目标检测方法,其特征在于,所述目标检测数据集包括:
3.根据权利要求2所述的一种基于yolov5的领域自适应目标检测方法,其特征在于,所述域自适应模型包括:
4.根据权利要求3所述的一种基于yolov5的领域自适应目标检测方法,其特征在于,所述选取训练样本对目标检测模型进行训练及优化包括:
5.根据权利要求3所述的一种基于yolov5的油田作业现场领域自适应目标检测方法,其特征在于,预训练模型选择使用yolov5l.pt,在初始训练中仅使用源域数据,最大迭代次数设为8000;学习率初始化为0.01,到第50轮次将其降低到0.001,在第100轮次将其降低到0.0001;动量设置为0.9,权重衰减为0.0001;模型收敛以后加入目标域数据,继续迭代10000次。
6.根据权利要求2所述的一种基于yolov5的领域自适应目标检测方法,其特征在于,所述源域数据集包括待检测目标的包围框标签以及坐标的图像数据。目标域数据集仅包含图像数据。源域数据和目标域数据允许存在差异,如角度差异、相机距离差异、环境差异以及天气差异等。
7.根据权利要求3所述的一种基于yolov5的领域自适应目标检测方法,其特征在于,所述域鉴别网络具体实现原理为:
8.根据权利要求7所述的一种基于yolov5的领域自适应目标检测方法,其特征在于,所述梯度反转层将传入到grl的梯度取负,使得在grl前后的网络的训练目标是相反的。在接入grl以后,使特征提取器需要生成能够预测出正确标签的特征并且提取的特征需要尽可能无法判断出来自哪个任务域。
技术总结
本发明提出了一种在油田不同场景下基于YOLOv5的领域自适应目标检测算法。主要包括以下步骤:1、获取带有标注数据的源域数据集和不带标注的目标域数据集;2、修改YOLOv5模型结构,添加额外的域鉴别分支构建领域自适应模型。3、将源域和目标域数据一起进行训练,通过域鉴别分支对源域和目标域数据进行分类,然后进行梯度反转实现域混淆,学习域不变特征,同时采用self‑training的方法使模型学习到目标域的知识。本发明提供了一种基于self‑training和对抗性学习的端到端的领域自适应的实现方法,能够减少数据标注耗费的大量时间和精力,在不进行额外标注任务的情况下,减少域偏移造成的模型精度下降问题,使深度学习模型能够迁移到其它场景。
技术研发人员:童彦淇,梁鸿,张千,王子昊,梁其耀,马子镇,任洁,冯林霞
受保护的技术使用者:中国石油大学(华东)
技术研发日:
技术公布日:2024/2/1
- 还没有人留言评论。精彩留言会获得点赞!