一种自动过滤晃动目标区域的抗干扰捕获高空抛物方法与流程
1.本发明涉及图像识别技术领域,具体地说,本发明涉及一种自动过滤晃动目标区域的抗干扰捕获高空抛物方法。
背景技术:
2.目前传统高空抛物都有绘制或者生成楼栋区域的方法,但仍然对摄像头的安装位置和内容有较高要求,不允许树木或其他植被等容易晃动的区域遮挡,虽然有一部分算法提出了目标过滤算法,实际应用中物体的晃动还是会严重干扰抛物跟踪算法从而影响整体的抛物监测效果。
技术实现要素:
3.为了克服现有技术的不足,本发明提供一种抗干扰的自动过滤晃动目标区域的抗干扰捕获高空抛物方法。
4.本发明解决其技术问题所采用的技术方案是:一种自动过滤晃动目标区域的抗干扰捕获高空抛物方法,其改进之处在于包括以下步骤:
5.s10.接入摄像头地址,抽取一张单帧图片并绘制识别区域;
6.s20.接入视频流,获取视频流中的每张单帧图片,裁剪得到识别区域后对图片使用前景建模算法,对建模mask进行生态学转换并生成目标识别框;
7.s30.根据目标识别框数量判断是否存在晃动区域,若存在晃动区域,初始化一个晃动区域mask和原mask,基于输入的mask连续统计一段时间前景和背景的数量,生成晃动的mask区域,对生成的晃动区域执行开闭运算等形态学操作,对靠近或者包裹的晃动区域进行合并,输出自动生成的晃动区域mask,使用生成的晃动区域mask屏蔽晃动区域后循环重复此步骤;
8.s40.为每一个目标识别框创建跟踪器,使用卡尔曼滤波创建速度模型,预测目标轨迹结果;
9.s50.使用预测轨迹结果和真实轨迹结果进行基于iou的匹配更新跟踪器,并输出结果,根据连续未匹配成功的帧数判断是否为干扰物,过滤掉判定为干扰物的目标识别框;
10.s60.将符合预测轨迹结果的目标识别框的轨迹结果绘制到图片和保存的视频中输出。
11.上述技术方案中所述步骤s20中对获取的每张单帧图片进行噪声去除、模糊去除、图片二值化和图像灰度操作。
12.上述技术方案中所述步骤s30中还需根据晃动区域的交集对连续的晃动区域进行过滤,排除杂草或树叶的干扰。
13.上述技术方案中所述步骤s60中轨迹生成包括以下步骤:
14.s601.输入跟踪结果;
15.s602.对相同的跟踪器建立轨迹模型;
16.s603.当长时间未更新轨迹的时候定义为轨迹结束;
17.s604.过滤轨迹数量不足和方向错误的轨迹;
18.s605.基于mse判断轨迹是否满足较小晃动,过滤部分蚊虫和飞鸟等不规则轨迹;
19.s606.将结果绘制到图片和保存的视频中输出。
20.上述技术方案中所述步骤s20中前景算法为gmm或vibe算法。
21.本发明的有益效果是:本发明在已有的绘制区域内,进行自动生成容易误报区域的算法,如风吹树叶晃动、树冠等等,通过mask的叠加,从根本上解决树木或其他物体在算法区域内晃动而引发的一系列性能上的降低,对抛物轨迹的捕捉有实质性的意义。
附图说明
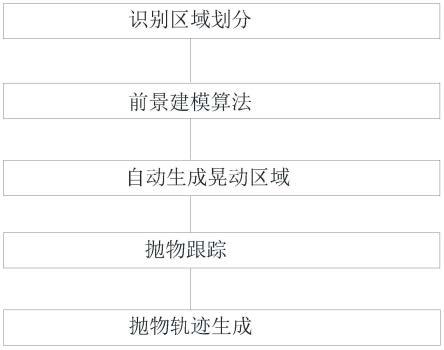
22.图1为本发明一种自动过滤晃动目标区域的抗干扰捕获高空抛物方法的流程图。
具体实施方式
23.下面结合附图和实施例对本发明进一步说明。
24.以下将结合实施例和附图对本发明的构思、具体结构及产生的技术效果进行清楚、完整地描述,以充分地理解本发明的目的、特征和效果。显然,所描述的实施例只是本发明的一部分实施例,而不是全部实施例,基于本发明的实施例,本领域的技术人员在不付出创造性劳动的前提下所获得的其他实施例,均属于本发明保护的范围。另外,专利中涉及到的所有联接/连接关系,并非单指构件直接相接,而是指可根据具体实施情况,通过添加或减少联接辅件,来组成更优的联接结构。本发明创造中的各个技术特征,在不互相矛盾冲突的前提下可以交互组合。
25.参照图1,如图所示,本发明提供了一种自动过滤晃动目标区域的抗干扰捕获高空抛物方法,包括以下步骤:
26.s10.接入摄像头地址,抽取一张单帧图片并绘制识别区域,对识别区域划分。
27.s20.接入视频流,获取视频流中的每张单帧图片,对获取的每张单帧图片进行噪声去除、模糊去除、图片二值化和图像灰度操作,裁剪得到识别区域后对图片使用前景建模算法,前景建模算法为vibe算法,对建模mask进行生态学转换并生成目标识别框。
28.s30.根据目标识别框数量判断是否存在晃动区域,若存在晃动区域,初始化一个晃动区域mask和原mask相同大小,用于生成和记录存在的晃动区域,基于输入的mask连续统计一段时间前景和背景的数量,生成晃动的mask区域,对生成的晃动区域执行开闭运算等形态学操作,对靠近或者包裹的晃动区域进行合并,根据晃动区域的交集对连续的晃动区域进行过滤,排除杂草或树叶的干扰,输出自动生成的晃动区域mask,使用生成的晃动区域mask屏蔽晃动区域后循环重复此步骤,循环更新晃动区域,可自动循环更新生成晃动区域。
29.s40.为每一个目标识别框创建跟踪器,使用卡尔曼滤波创建速度模型,预测目标轨迹结果。
30.s50.使用预测轨迹结果和真实轨迹结果进行基于iou的匹配更新跟踪器,并输出结果,根据连续未匹配成功的帧数判断是否为干扰物,连续三帧未匹配成功即视为干扰物,过滤掉判定为干扰物的目标识别框。
31.s60.将符合预测轨迹结果的目标识别框的轨迹结果绘制到图片和保存的视频中输出。
32.通过mask的叠加,从根本上解决树木或其他物体在算法区域内晃动而引发的一系列性能上的降低。
33.对于步骤s60中轨迹生成包括以下步骤:
34.s601.输入跟踪结果。
35.s602.对相同的跟踪器建立轨迹模型。
36.s603.当长时间未更新轨迹的时候定义为轨迹结束。
37.s604.过滤轨迹数量不足和方向错误的轨迹。
38.s605.基于mse判断轨迹是否满足较小晃动,过滤部分蚊虫和飞鸟等不规则轨迹。
39.s606.将结果绘制到图片和保存的视频中输出。
40.根据跟踪结果绘制到图片和视频中输出,同时进一步对干扰物排除。
41.以上是对本发明的较佳实施进行了具体说明,但本发明创造并不限于所述实施例,熟悉本领域的技术人员在不违背本发明精神的前提下还可做出种种的等同变形或替换,这些等同的变形或替换均包含在本申请权利要求所限定的范围内。
技术特征:
1.一种自动过滤晃动目标区域的抗干扰捕获高空抛物方法,其特征在于包括以下步骤:s10.接入摄像头地址,抽取一张单帧图片并绘制识别区域;s20.接入视频流,获取视频流中的每张单帧图片,裁剪得到识别区域后对图片使用前景建模算法,对建模mask进行生态学转换并生成目标识别框;s30.根据目标识别框数量判断是否存在晃动区域,若存在晃动区域,初始化一个晃动区域mask和原mask,基于输入的mask连续统计一段时间前景和背景的数量,生成晃动的mask区域,对生成的晃动区域执行开闭运算等形态学操作,对靠近或者包裹的晃动区域进行合并,输出自动生成的晃动区域mask,使用生成的晃动区域mask屏蔽晃动区域后循环重复此步骤;s40.为每一个目标识别框创建跟踪器,使用卡尔曼滤波创建速度模型,预测目标轨迹结果;s50.使用预测轨迹结果和真实轨迹结果进行基于iou的匹配更新跟踪器,并输出结果,根据连续未匹配成功的帧数判断是否为干扰物,过滤掉判定为干扰物的目标识别框;s60.将符合预测轨迹结果的目标识别框的轨迹结果绘制到图片和保存的视频中输出。2.根据权利要求1所述的一种自动过滤晃动目标区域的抗干扰捕获高空抛物方法,其特征在于:所述步骤s20中对获取的每张单帧图片进行噪声去除、模糊去除、图片二值化和图像灰度操作。3.根据权利要求1所述的一种自动过滤晃动目标区域的抗干扰捕获高空抛物方法,其特征在于:所述步骤s30中还需根据晃动区域的交集对连续的晃动区域进行过滤,排除杂草或树叶的干扰。4.根据权利要求1所述的一种自动过滤晃动目标区域的抗干扰捕获高空抛物方法,其特征在于:所述步骤s60中轨迹生成包括以下步骤:s601.输入跟踪结果;s602.对相同的跟踪器建立轨迹模型;s603.当长时间未更新轨迹的时候定义为轨迹结束;s604.过滤轨迹数量不足和方向错误的轨迹;s605.基于mse判断轨迹是否满足较小晃动,过滤部分蚊虫和飞鸟等不规则轨迹;s606.将结果绘制到图片和保存的视频中输出。5.根据权利要求1所述的一种自动过滤晃动目标区域的抗干扰捕获高空抛物方法,其特征在于:所述步骤s20中前景算法为gmm或vibe算法。
技术总结
本发明公开了一种自动过滤晃动目标区域的抗干扰捕获高空抛物方法,包括以下步骤:S10.识别区域划分;S20.对划分的区域进行前景建模算法;S30.自动循环更新生成晃动区域并根据数量及合并交集的晃动区域排除干扰物;S40.对抛物进行跟踪;S50.生成抛物轨迹。通过对晃动区域的循环更新生成及排除干扰物,并根据抛物轨迹进一步排除干扰物的干扰,对抛物轨迹的捕捉有实质性的意义。捕捉有实质性的意义。捕捉有实质性的意义。
技术研发人员:林志坤 段立新 张神力
受保护的技术使用者:深圳天海宸光科技有限公司
技术研发日:2022.07.29
技术公布日:2022/12/1
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1