点云数据的参数化及地图构建方法与流程
本发明涉及地图构建方法,特别涉及一种点云数据的参数化及基于点云数据的地图构建方法。
背景技术:
1、在自动驾驶领域中,高精度地图(high definition map)可以包含语义信息。通过对于地图数据进行语义分割处理而生成的高精度语义地图(highdefinition semanticmap)例如包括车道线或灯杆等道路信息,可用于自动驾驶车辆定位及路径规划。因此,大规模构建高精度语义地图的技术对于自动驾驶技术的发展十分重要。
2、一般而言,构建语义地图以提供自动驾驶需求的方法主要有两种。第一种是基于激光雷达的方法,即通过传感器融合得到点云地图后,根据点云地图中各类语义元素的几何结构及反射强度,以人工的方式标注出语义地图。第二种是基于相机的方法,即通过语义分割,从相机采集的图片数据检测出语义元素。之后,利用相机的安装高度等信息估算出各帧语义元素的三维信息,并使用多传感器融合得到的相机位姿信息对各帧的语义观测进行融合,从而构建出全局的语义地图。在上述方法中,基于人工的方式对激光雷达所采集的点云数据进行标注虽然能满足高精度需求,然而人工的方式效率低下且成本高,不利于大规模的地图构建。此外,基于对相机采集的图片数据作语义分割的方案虽然可以实现语义地图的自动化构建,然而通过图片数据、位姿信息进行各种估算所得到的语义地图误差较大,不满足高精度的要求。
3、因此,如何自动化构建高精度语义地图,以同时满足高精度及高效率构建的要求,实为本领域技术人员亟待解决的技术问题。
技术实现思路
1、本发明实施例提供一种点云数据的参数化方法、装置、设备及存储介质,能够在地图构建的过程中,实现构建基于点云数据的语义地图的自动化,提高构建高精度语义地图的效率。
2、本发明实施例提供一种地图构建方法、装置、设备及存储介质,能够实现构建基于点云数据的语义地图的自动化,提高构建高精度语义地图的效率。
3、第一方面,本发明实施例提供一种点云数据的参数化方法,此点云数据的参数化方法包括:
4、对点云数据在空间坐标系中的多个三维数据点进行语义分割,得到至少一个语义对象,其中语义对象对应于多个语义三维数据点;
5、对多个语义三维数据点进行参数化拟合,得到表示与多个语义三维数据点对应的语义对象在空间坐标系中的空间几何参数。
6、第二方面,本发明实施例提供一种点云数据的参数化装置,此点云数据的参数化装置包括:
7、语义分割模块,用于对点云数据在空间坐标系中的多个三维数据点进行语义分割,得到至少一个语义对象,其中语义对象对应于多个语义三维数据点;
8、参数化拟合模块,用于对多个语义三维数据点进行参数化拟合,得到表示与多个语义三维数据点对应的语义对象在空间坐标系中的空间几何参数。
9、第三方面,本发明实施例提供一种地图构建方法,此地图构建方法包括:
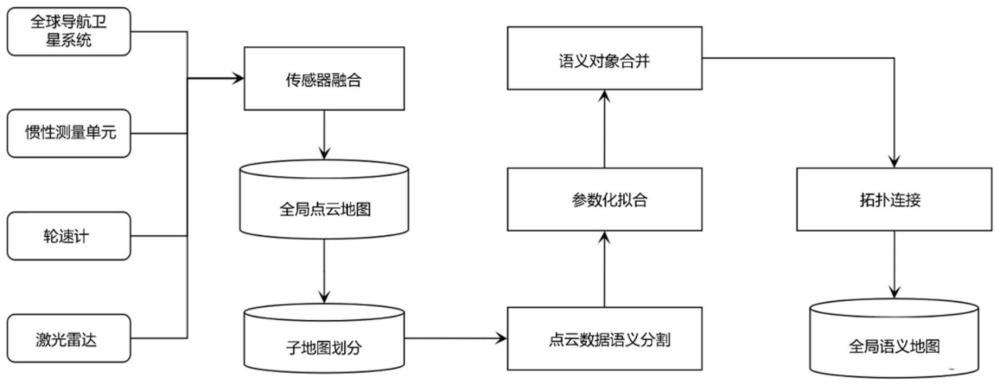
10、根据传感器数据构建点云地图,其中点云地图包括在空间坐标系中的点云数据;
11、对点云数据在空间坐标系中的多个三维数据点进行语义分割,得到至少一个语义对象,其中语义对象对应于多个语义三维数据点;
12、对多个语义三维数据点进行参数化拟合,得到表示与多个语义三维数据点对应的语义对象在空间坐标系中的空间几何参数;
13、根据至少一个语义对象的空间几何参数构建语义地图。
14、第四方面,本发明实施例提供一种地图构建装置,此地图构建装置包括:
15、点云地图构建模块,用于根据传感器数据构建点云地图,其中点云地图包括在空间坐标系中的点云数据;
16、语义分割模块,用于对点云数据在空间坐标系中的多个三维数据点进行语义分割,得到至少一个语义对象,其中语义对象对应于多个语义三维数据点;
17、参数化拟合模块,用于对多个语义三维数据点进行参数化拟合,得到表示与多个语义三维数据点对应的语义对象在空间坐标系中的空间几何参数;
18、语义地图构建模块,用于根据至少一个语义对象的空间几何参数构建语义地图。
19、第五方面,本发明实施例提供了一种计算机设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,处理器执行计算机程序时实现如本发明实施例提供的点云数据的参数化方法。
20、第六方面,本发明实施例提供了一种计算机设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,处理器执行计算机程序时实现如本发明实施例提供的地图构建方法。
21、第七方面,本发明实施例提供了一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现如本发明实施例提供的点云数据的参数化方法。
22、第八方面,本发明实施例提供了一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现如本发明实施例提供的地图构建方法。
23、基于上述公开,由于对点云数据的多个三维数据点进行语义分割,得以获取对应于至少一个语义对象的多个语义三维数据点。此外,这些语义三维数据点进行参数化拟合,得到表示与这些语义三维数据点对应的语义对象在空间坐标系中的空间几何参数,实现语义对象的参数化拟合。这些空间几何参数可以用以构建语义向量地图,进而构建语义地图。因此,点云数据的参数化方案及地图构建方案能够在地图构建的过程中,自动化地构建基于点云数据的语义地图,提高构建高精度语义地图的效率。
技术特征:
1.一种点云数据的参数化方法,其特征在于,包括:
2.根据权利要求1的所述方法,其特征在于,所述至少一个语义对象包括地面,所述多个语义三维数据点包括多个地面语义数据点,对应于所述地面,所述对所述多个语义三维数据点进行参数化拟合,得到表示与所述多个语义三维数据点对应的所述语义对象在所述空间坐标系中的空间几何参数,包括:
3.根据权利要求2的所述方法,其特征在于,所述根据落入栅格区域的多个地面语义数据点定义所述二维栅格的多个顶点的多个高度值,包括:
4.根据权利要求2的所述方法,其特征在于,所述对所述多个语义三维数据点进行参数化拟合,得到表示与所述多个语义三维数据点对应的所述语义对象在所述空间坐标系中的空间几何参数,更包括:
5.根据权利要求4的所述方法,其特征在于,各采样地面语义数据点根据距离权重约束所述二维栅格中的各顶点的高度值,其中在所述栅格区域内的所述各采样地面语义数据点与顶点之间的距离负相关于所述距离权重,所述距离定义于与所述平面平行的方向上。
6.根据权利要求2的所述方法,其特征在于,在一个二维栅格中,一个顶点相邻的其他顶点定义为第一相邻顶点,且与所述顶点相邻的其他二维栅格中的其他顶点定义为第二相邻顶点,其中所述顶点的高度值约束所述第一相邻顶点及所述第二相邻顶点。
7.根据权利要求2的所述方法,其特征在于,所述至少一个语义对象更包括车道线,所述多个语义三维数据点更包括多个车道线语义数据点,对应于所述车道线,所述对所述多个语义三维数据点进行参数化拟合,得到表示与所述多个语义三维数据点对应的所述语义对象在所述空间坐标系中的空间几何参数,更包括:
8.根据权利要求7的所述方法,其特征在于,所述根据所述车道线投影拟合平面及所述多个车道线语义数据点,确定所述车道线的所述空间几何参数,包括:
9.根据权利要求8的所述方法,其特征在于,所述根据所述车道线投影拟合平面及所述多个车道线语义数据点,确定所述车道线的所述空间几何参数,更包括:
10.根据权利要求2的所述方法,其特征在于,所述至少一个语义对象更包括路牌,所述多个语义三维数据点更包括多个路牌语义数据点,对应于所述路牌,所述对所述多个语义三维数据点进行参数化拟合,得到表示与所述多个语义三维数据点对应的所述语义对象在所述空间坐标系中的空间几何参数,更包括:
11.根据权利要求10的所述方法,其特征在于,所述根据所述路牌投影拟合平面及所述多个路牌语义数据点,确定所述路牌的所述空间几何参数,包括:
12.根据权利要11的所述方法,其特征在于,所述根据所述路牌投影拟合平面及所述多个路牌语义数据点,确定所述路牌的所述空间几何参数,更包括:
13.根据权利要求1的所述方法,其特征在于,所述至少一个语义对象包括灯杆,所述多个语义三维数据点包括多个灯杆语义数据点,对应于所述灯杆,所述对所述多个语义三维数据点进行参数化拟合,得到表示与所述多个语义三维数据点对应的所述语义对象在所述空间坐标系中的空间几何参数,包括:
14.根据权利要求13的所述方法,其特征在于,所述根据所述多个灯杆语义数据点,确定所述灯杆的所述空间几何参数,包括:
15.根据权利要求14的所述方法,其特征在于,所述根据所述多个灯杆语义数据点,确定所述灯杆的所述空间几何参数,更包括:
16.一种地图构建方法,其特征在于,包括:
17.根据权利要求16的所述方法,其特征在于,所述根据传感器数据得到点云地图,其中所述点云地图包括在空间坐标系中的点云数据,包括:
18.根据权利要求17的所述方法,其特征在于,所述传感器数据由配置传感器且沿车道行驶的车辆所收集,且所述多个子地图为沿着所述车道的行驶方向划分,其中所述相邻的二个子地图包括第一子地图及第二子地图,所述第二子地图在所述重叠区域以外的区域具有当所述车辆行驶于所述第一子地图的所述车道时所收集的点云数据。
19.根据权利要求17的所述方法,其特征在于,所述各个子地图包括深度信息超过80米的点云数据。
20.根据权利要求17的所述方法,其特征在于,所述传感器数据由配置多个传感器的车辆所收集,所述多个传感器包括激光雷达及一个或多个以下传感器:全球导航卫星系统(global navigation satellite system,gnss)、惯性测量单元(inertial measurementunit,imu)、轮速计及图像采集装置。
21.根据权利要求17的所述方法,其特征在于,更包括:
22.根据权利要求16的所述方法,其特征在于,所述至少一个语义对象包括多个车道线,且所述根据所述至少一个语义对象的所述空间几何参数构建语义地图,包括:
23.一种点云数据的参数化装置,其特征在于,包括:
24.一种地图构建装置,其特征在于,包括:
25.一种计算机设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求1-22任一项所述的方法。
26.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行时实现如权利要求1-22任一项所述的方法。
技术总结
本发明公开一种点云数据的参数化方法、装置、设备及存储介质。该方法包括对点云数据在空间坐标系中的多个三维数据点进行语义分割,得到至少一个语义对象。语义对象对应于多个语义三维数据点。点云数据的参数化方法还包括对多个语义三维数据点进行参数化拟合,得到表示与多个语义三维数据点对应的语义对象在空间坐标系中的空间几何参数。另外,一种地图构建方法、装置、设备及存储介质亦被提出。通过采用上述技术方案,得以实现构建基于点云数据的语义地图的自动化,提高构建高精度语义地图的效率。
技术研发人员:刘光伟,周翯男,王乃岩
受保护的技术使用者:北京图森智途科技有限公司
技术研发日:
技术公布日:2024/3/17
- 还没有人留言评论。精彩留言会获得点赞!