一种双目视觉的摄像机场景区域快速定位方法、存储介质及系统与流程
本方案涉及摄像头处理领域,尤其涉及一种双目视觉摄像机的调整方法。
背景技术:
1、全景摄像机与局部摄像机组成的双目摄像机系统中,全景摄像机拥有大范围视野,但观察局部场景时需要调用局部摄像机来获得局部详细信息,生产生活中往往需要手动控制局部摄像机在水平和垂直方向上运动,并调整其焦距,以获取目标区域的细节图像。这种方法效率较低,特别地当需要对多个区域进行定位时,将手动重复操作ptz摄像机云台,耗时耗力,因此需要一种能自动且快速定位目标场景的方法。
技术实现思路
1、为此,需要提供一种双目视觉的摄像机场景区域快速定位方法,能够节省计算量,提升视觉摄像机在场景中的自动快速定位能力。
2、为实现上述目的,发明人提供了一种双目视觉的摄像机场景区域快速定位方法,包括如下步骤:
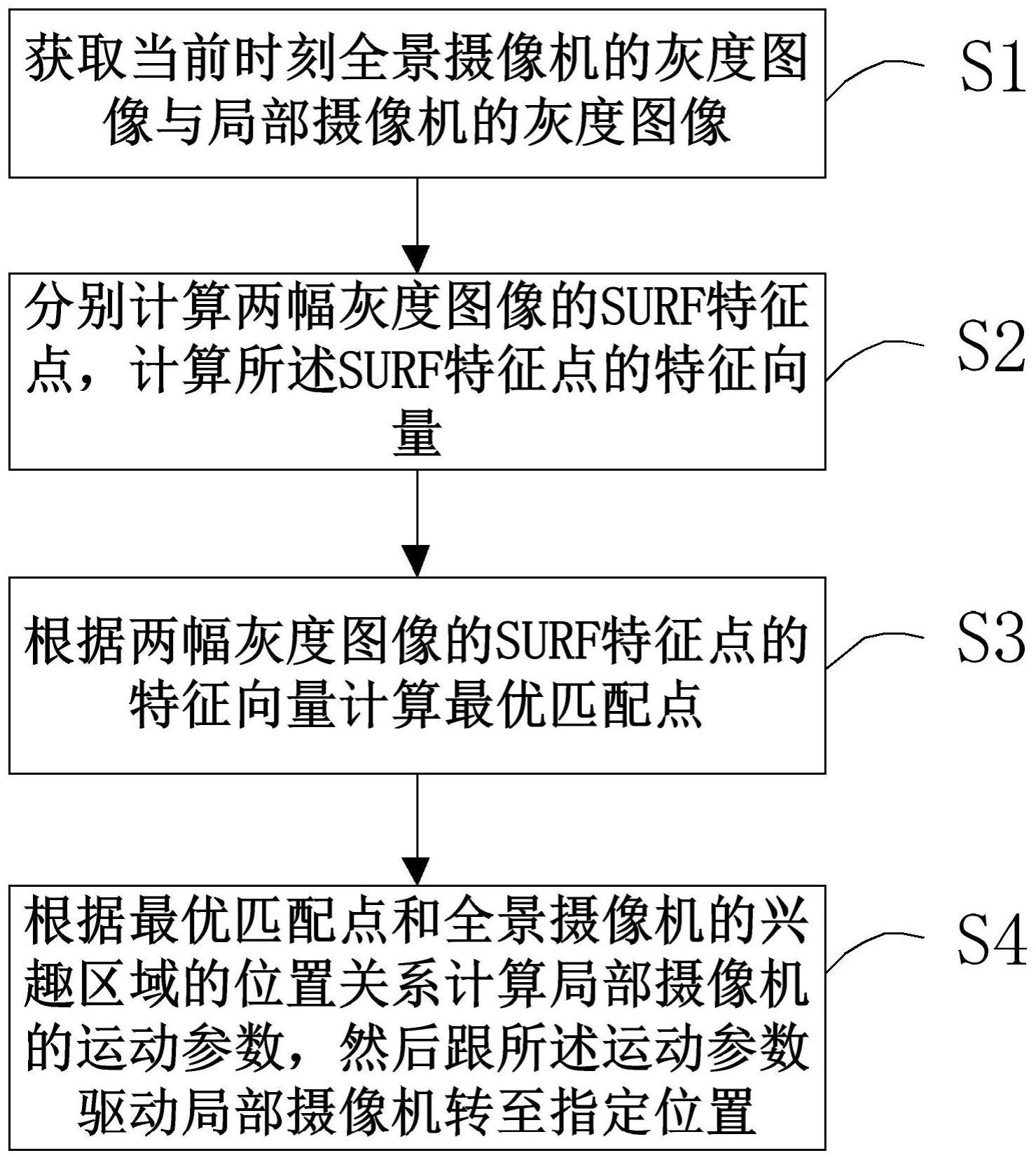
3、步骤s1,获取当前时刻全景摄像机的灰度图像与局部摄像机的灰度图像;
4、步骤s2,分别计算两幅灰度图像的surf特征点,计算所述surf特征点的特征向量;
5、步骤s3,根据两幅灰度图像的surf特征点的特征向量计算最优匹配点,
6、步骤s4,根据最优匹配点计算最优映射关系,根据所述最优映射关系、局部摄像机当前视点和全景摄像机的目标区域的中心点位置关系计算局部摄像机的运动参数,然后根据所述局部摄像机的运动参数驱动局部摄像机转至指定位置。
7、在一些具体的实施例中,根据两幅灰度图像的surf特征点的特征向量计算最优匹配点,具体包括步骤:
8、计算全景摄像机的灰度图像的第一特征点到局部摄像机的灰度图像中最佳匹配的特征点;还计算局部摄像机的灰度图像中的第二特征点到全景摄像机的灰度图像中最佳匹配的特征点,若所述第一特征点与所述第二特征点互为最佳匹配的特征点,则所述第一特征点与所述第二特征点结为匹配对;
9、在所有匹配对中挑选欧式距离最短的匹配对为最优匹配对,所述最优匹配对中全景摄像机的灰度图像的特征点为最优匹配点。
10、在一些具体的实施例中,所述步骤:“计算全景摄像机的灰度图像的第一特征点到局部摄像机的灰度图像中最佳匹配的特征点”还包括验证步骤:
11、计算全景摄像机的灰度图像的第一特征点到局部摄像机的灰度图像中次优匹配的特征点,若所述次优匹配的特征点的欧式距离与最佳匹配的特征点的欧式距离的差值小于预设值,则舍弃最佳匹配的特征点。
12、在一些具体的实施例中,所述步骤:“计算局部摄像机的灰度图像中的第二特征点到全景摄像机的灰度图像中最佳匹配的特征点”还包括验证步骤:
13、计算局部摄像机的灰度图像的第二特征点到全景摄像机的灰度图像中次优匹配的特征点,若所述次优匹配的特征点的欧式距离与最佳匹配的特征点的欧式距离的差值小于预设值,则舍弃最佳匹配的特征点。
14、在一些具体的实施例中,局部摄像机的运动参数包括驱动局部摄像机的云台的横坐标参数、纵坐标参数和局部摄像机机芯变倍参数。
15、在一些具体的实施例中,所述局部摄像机包括ptz摄像机。
16、在一些具体的实施例中,还包括步骤,分别以全景摄像机的灰度图像与局部摄像机的灰度图像的左下角为原点,图像的宽高方向为坐标轴,以像素为单位建立图像像素坐标系。
17、一种双目视觉的摄像机场景区域快速定位存储介质,存储有计算机程序,所述计算机程序在被运行时执行上述的双目视觉的摄像机场景区域快速定位方法。
18、一种双目视觉的摄像机场景区域快速定位系统,包括如上述的双目视觉的摄像机场景区域快速定位存储介质。
19、在一些具体的实施例中,还包括云台、局部摄像机和全景摄像机,所述全景摄像机与局部摄像机竖直上下安装,所述全景摄像机与所述局部摄像机光心近似重合。
20、区别于现有技术,上述技术方案通过两幅灰度图像的灰度进行比对,通过surf特征点寻找最优匹配点,再行自动调整局部摄像机到最优匹配点上的技术方案,最终达到快速定位局部摄像机的目标区域的技术效果。
技术特征:
1.一种双目视觉的摄像机场景区域快速定位方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的双目视觉的摄像机场景区域快速定位方法,其特征在于,根据两幅灰度图像的surf特征点的特征向量计算最优匹配点,具体包括步骤:
3.根据权利要求2所述的双目视觉的摄像机场景区域快速定位方法,其特征在于,所述步骤:“计算全景摄像机的灰度图像的第一特征点到局部摄像机的灰度图像中最佳匹配的特征点”还包括验证步骤:
4.根据权利要求2所述的双目视觉的摄像机场景区域快速定位方法,其特征在于,所述步骤:“计算局部摄像机的灰度图像中的第二特征点到全景摄像机的灰度图像中最佳匹配的特征点”还包括验证步骤:
5.根据权利要求4所述的双目视觉的摄像机场景区域快速定位方法,其特征在于,所述局部摄像机的运动参数包括驱动局部摄像机的云台的横坐标参数、纵坐标参数和局部摄像机机芯变倍参数。
6.根据权利要求1-5其中一项所述的双目视觉的摄像机场景区域快速定位方法,其特征在于,所述局部摄像机包括ptz摄像机。
7.根据权利要求1-5其中一项所述的双目视觉的摄像机场景区域快速定位方法,其特征在于,还包括步骤,分别以全景摄像机的灰度图像与局部摄像机的灰度图像的左下角为原点,图像的宽高方向为坐标轴,以像素为单位建立图像像素坐标系。
8.一种双目视觉的摄像机场景区域快速定位存储介质,其特征在于,存储有计算机程序,所述计算机程序在被运行时执行权利要求1-7其中一项所述的双目视觉的摄像机场景区域快速定位方法。
9.一种双目视觉的摄像机场景区域快速定位系统,其特征在于,包括如权利要求8所述的双目视觉的摄像机场景区域快速定位存储介质。
10.根据权利要求9所述的双目视觉的摄像机场景区域快速定位系统,其特征在于,还包括云台、局部摄像机和全景摄像机,所述全景摄像机与局部摄像机竖直上下安装,所述全景摄像机与所述局部摄像机光心近似重合。
技术总结
一种双目视觉的摄像机场景区域快速定位方法、存储介质及系统,其中方法包括如下步骤:步骤S1,获取当前时刻全景摄像机的灰度图像与局部摄像机的灰度图像;步骤S2,分别计算两幅灰度图像的SURF特征点,计算所述SURF特征点的特征向量;步骤S3,根据两幅灰度图像的SURF特征点的特征向量计算最优匹配点,步骤S4,根据最优匹配点和全景摄像机的目标区域的位置关系计算局部摄像机的运动参数,然后跟所述运动参数驱动局部摄像机转至指定位置。区别于现有技术,上述技术方案通过两幅灰度图像的灰度进行比对,通过SURF特征点寻找最优匹配点,再行自动调整局部摄像机到最优匹配点上的技术方案,最终达到快速定位局部摄像机的目标区域的技术效果。
技术研发人员:郑宏雄,林建强,郑维宏,田中敏,黄建雄,魏军福,高学田,蓝晏琪,陈州
受保护的技术使用者:福建星网物联信息系统有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!