星间通信约束下的卫星长期对日三轴指向姿态设计方法
本发明属于卫星姿态动力学与控制领域,具体涉及一种星间通信约束下的卫星长期对日三轴指向姿态设计方法。
背景技术:
1、姿态确定与控制是现代卫星所必须的平台功能,是保证卫星能源供给、热控稳定以及完成在轨任务的重要前提。卫星的对日指向控制是最基本的控制模式,其主要目的是维持卫星太阳帆板法向稳定的指向太阳,从而确保卫星能够获取充足的能源。考虑到对日指向是卫星在轨绝大部分时间所维持的姿态,且现代卫星一般采取三轴稳定的姿态控制方式,因此长期三轴稳定的对日指向姿态是卫星姿态控制设计过程中需要优先解决的重要问题。通常三轴稳定的对日指向姿态只有一个轴方向上的强约束,即太阳帆板法向方向要与太阳方向矢量平行。在多颗卫星编队飞行任务中,要求卫星之间保长期持续的通信链路,增加了卫星长期对日工作时的指向约束。同时,考虑到运行在低倾角轨道上的卫星,太阳方向矢量与卫星轨道面法向的相对关系存在正负极性变化,同样给长期稳定的对日姿态设计提出挑战。需要综合上述多种约束条件下,设计卫星长期稳定对日三轴指向姿态。
技术实现思路
1、本发明要解决的技术问题是:针对现有技术存在的上述问题,提供一种星间通信约束下的卫星长期对日三轴指向姿态设计方法,本发明能够在满足卫星太阳帆板法向指向太阳的基本条件下,同时保证空间编队卫星之间的通信指向要求,并可避免低倾角轨道上卫星受晒条件的极性变化影响,为卫星提供稳定安全的长期对日姿态。
2、为了解决上述技术问题,本发明所采用的技术方案是:
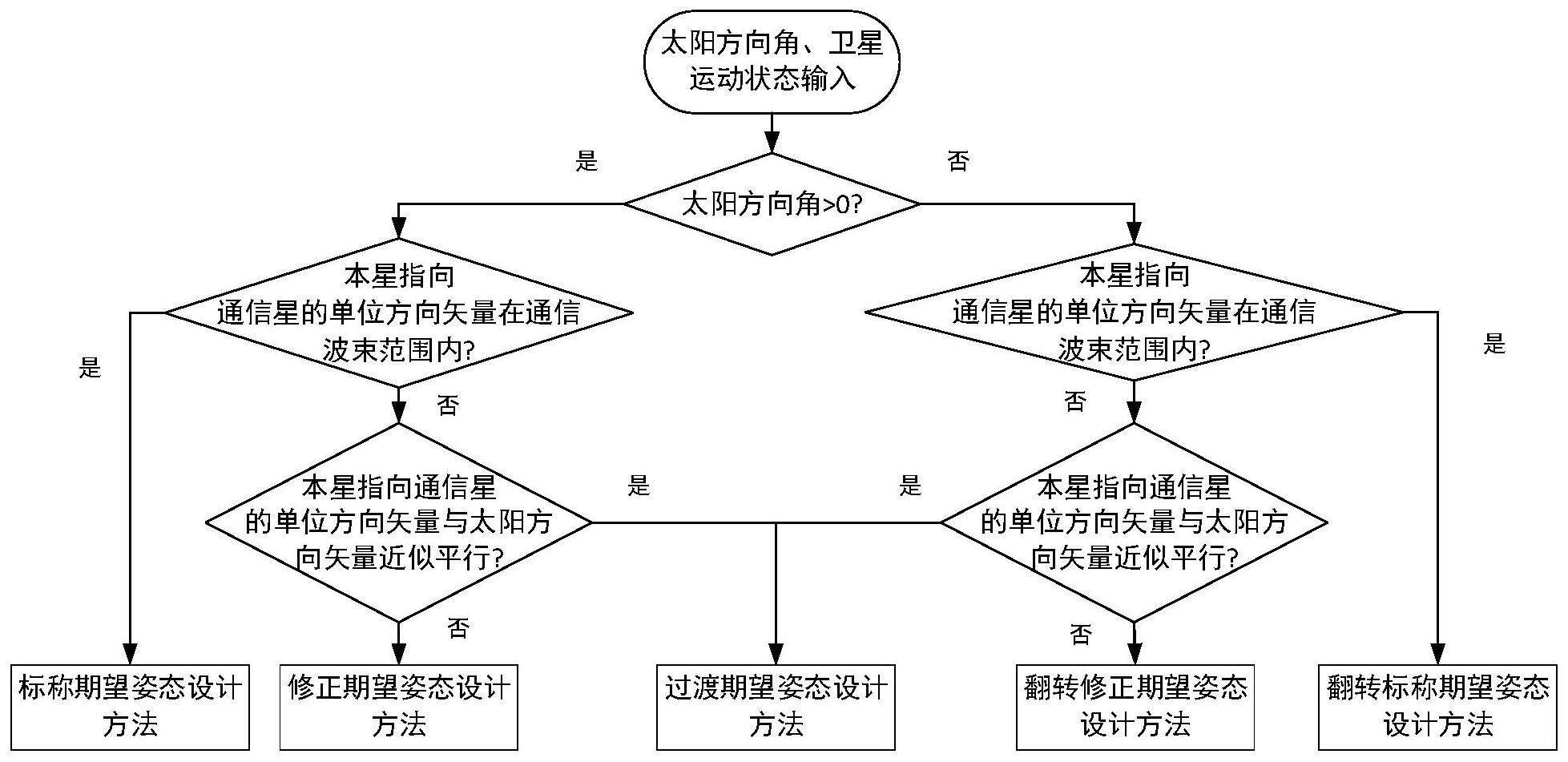
3、一种星间通信约束下的卫星长期对日三轴指向姿态设计方法,包括获取太阳方向角和卫星运动状态,在太阳方向角大于0、且卫星运动状态中本星指向星间通信星的单位方向矢量在星间通信波束覆盖范围内同时成立时,设计标称期望姿态m1作为当前的卫星期望姿态,且标称期望姿态m1的函数表达式为:
4、
5、上式中,m1为标称期望姿态,xb,yb和zb为卫星体坐标轴,且有:
6、
7、yb=-rs
8、
9、上式中,rs为太阳方向的单位矢量,ρ为本星指向星间通信星的单位方向矢量。
10、可选地,还包括在太阳方向角大于0、且卫星运动状态中本星指向星间通信星的单位方向矢量不在星间通信波束覆盖范围内、本星指向星间通信星的单位方向矢量与太阳方向的单位矢量不近似平行同时成立时,在标称期望姿态m1的基础上乘以第一修正矩阵δm2得到修正期望姿态m2作为当前的卫星期望姿态,其中第一修正矩阵δm2的函数表达式为:
11、δm2=rz(ν)
12、上式中,函数rz(ν)表示绕卫星zb旋转角度ν形成的转换矩阵,角度ν的计算公式为:
13、
14、上式中,η为本星指向星间通信星的单位方向矢量与太阳方向的单位矢量之间夹角,α为星间通信波束半锥角,且α<90°,δ为预设的偏差量。
15、可选地,还包括在太阳方向角大于0、且卫星运动状态中本星指向星间通信星的单位方向矢量不在星间通信波束覆盖范围内、本星指向星间通信星的单位方向矢量与太阳方向的单位矢量近似平行同时成立时,获取前一时刻的卫星长期对日三轴指向姿态作为过渡期望姿态,并将过渡期望姿态作为当前的卫星期望姿态。
16、可选地,还包括在太阳方向角小于等于0、且卫星运动状态中本星指向星间通信星的单位方向矢量在星间通信波束覆盖范围内同时成立时,在标称期望姿态m1的基础上通过极性调整得到翻转标称期望姿态m′1作为当前的卫星期望姿态。
17、可选地,翻转标称期望姿态m′1的函数表达式为:
18、
19、上式中,m′1为翻转标称期望姿态,xb,yb和zb为卫星体坐标轴,且有:
20、
21、yb=-rs
22、
23、上式中,rs为太阳方向的单位矢量,ρ为本星指向星间通信星的单位方向矢量。
24、可选地,还包括在太阳方向角小于等于0、且卫星运动状态中本星指向星间通信星的单位方向矢量不在星间通信波束覆盖范围内、本星指向星间通信星的单位方向矢量与太阳方向的单位矢量不近似平行同时成立时,在翻转标称期望姿态m′1的基础上乘以第二修正矩阵δm′2得到修正期望姿态m2作为当前的卫星期望姿态,其中第二修正矩阵δm′2的函数表达式为:
25、δm′2=rz(ν′)
26、上式中,函数rz(ν′)表示绕卫星zb旋转角度ν′形成的转换矩阵,角度ν′的计算公式为:
27、
28、上式中,η为本星指向星间通信星的单位方向矢量与太阳方向的单位矢量之间夹角,α为星间通信波束半锥角,且α<90°,δ为预设的偏差量。
29、可选地,还包括在太阳方向角小于等于0、且卫星运动状态中本星指向星间通信星的单位方向矢量不在星间通信波束覆盖范围内、本星指向星间通信星的单位方向矢量与太阳方向的单位矢量近似平行同时成立时,获取前一时刻的卫星长期对日三轴指向姿态作为过渡期望姿态,并将过渡期望姿态作为当前的卫星期望姿态。
30、可选地,在得到当前的卫星期望姿态之后还包括计算期望角速度ω*的步骤,且在太阳方向角大于0时,计算期望角速度ω*的函数表达式为:
31、
32、
33、
34、在太阳方向角小于等于0时,计算期望角速度ω*的函数表达式为:
35、
36、
37、
38、其中,xb,yb和zb为卫星体坐标轴,rs为太阳方向的单位矢量,ρ为本星指向星间通信星的单位方向矢量,为yb的微分,为rs的微分,为zb的微分。
39、此外,本发明还提供一种星间通信约束下的卫星长期对日三轴指向姿态设计系统,包括相互连接的微处理器和存储器,该微处理器被编程或配置以执行所述星间通信约束下的卫星长期对日三轴指向姿态设计方法的步骤,或者该存储器中存储有被编程或配置以执行所述星间通信约束下的卫星长期对日三轴指向姿态设计方法的计算机程序。
40、此外,本发明还提供一种计算机可读存储介质,该计算机可读存储介质中存储有被编程或配置以执行所述星间通信约束下的卫星长期对日三轴指向姿态设计方法的计算机程序。
41、与现有技术相比,本发明技术方案具有下述有益效果:本发明能够在满足卫星太阳帆板法向指向太阳的基本条件下,同时保证空间编队卫星之间的通信指向要求,并可避免低倾角轨道上卫星受晒条件的极性变化影响,为卫星提供稳定安全的长期对日姿态,不仅能够保证卫星能源安全的姿态指向条件,还满足编队通信的连续性要求,同时还能确保了卫星稳定的受晒条件。
技术特征:
1.一种星间通信约束下的卫星长期对日三轴指向姿态设计方法,其特征在于,包括获取太阳方向角和卫星运动状态,在太阳方向角大于0、且卫星运动状态中本星指向星间通信星的单位方向矢量在星间通信波束覆盖范围内同时成立时,设计标称期望姿态m1作为当前的卫星期望姿态,且标称期望姿态m1的函数表达式为:
2.根据权利要求1所述的星间通信约束下的卫星长期对日三轴指向姿态设计方法,其特征在于,还包括在太阳方向角大于0、且卫星运动状态中本星指向星间通信星的单位方向矢量不在星间通信波束覆盖范围内、本星指向星间通信星的单位方向矢量与太阳方向的单位矢量不平行同时成立时,在标称期望姿态m1的左边乘以第一修正矩阵δm2得到修正期望姿态m2作为当前的卫星期望姿态,其中第一修正矩阵δm2的函数表达式为:
3.根据权利要求2所述的星间通信约束下的卫星长期对日三轴指向姿态设计方法,其特征在于,还包括在太阳方向角大于0、且卫星运动状态中本星指向星间通信星的单位方向矢量不在星间通信波束覆盖范围内、本星指向星间通信星的单位方向矢量与太阳方向的单位矢量平行同时成立时,获取前一时刻的卫星长期对日三轴指向姿态作为过渡期望姿态,并将过渡期望姿态作为当前的卫星期望姿态。
4.根据权利要求3所述的星间通信约束下的卫星长期对日三轴指向姿态设计方法,其特征在于,还包括在太阳方向角小于等于0、且卫星运动状态中本星指向星间通信星的单位方向矢量在星间通信波束覆盖范围内同时成立时,在标称期望姿态m1的基础上通过极性调整得到翻转标称期望姿态m′1作为当前的卫星期望姿态。
5.根据权利要求4所述的星间通信约束下的卫星长期对日三轴指向姿态设计方法,其特征在于,翻转标称期望姿态m′1的函数表达式为:
6.根据权利要求5所述的星间通信约束下的卫星长期对日三轴指向姿态设计方法,其特征在于,还包括在太阳方向角小于等于0、且卫星运动状态中本星指向星间通信星的单位方向矢量不在星间通信波束覆盖范围内、本星指向星间通信星的单位方向矢量与太阳方向的单位矢量不平行同时成立时,在翻转标称期望姿态m′1的左边乘以第二修正矩阵δm′2得到修正期望姿态m′2作为当前的卫星期望姿态,其中第二修正矩阵δm′2的函数表达式为:
7.根据权利要求6所述的星间通信约束下的卫星长期对日三轴指向姿态设计方法,其特征在于,还包括在太阳方向角小于等于0、且卫星运动状态中本星指向星间通信星的单位方向矢量不在星间通信波束覆盖范围内、本星指向星间通信星的单位方向矢量与太阳方向的单位矢量平行同时成立时,获取前一时刻的卫星长期对日三轴指向姿态作为过渡期望姿态,并将过渡期望姿态作为当前的卫星期望姿态。
8.根据权利要求1~7中任意一项所述的星间通信约束下的卫星长期对日三轴指向姿态设计方法,其特征在于,在得到当前的卫星期望姿态之后还包括计算期望角速度ω*的步骤,且在太阳方向角大于0时,计算期望角速度ω*的函数表达式为:
9.一种星间通信约束下的卫星长期对日三轴指向姿态设计系统,包括相互连接的微处理器和存储器,其特征在于,该微处理器被编程或配置以执行权利要求1~8中任意一项所述星间通信约束下的卫星长期对日三轴指向姿态设计方法,或者该存储器中存储有被编程或配置以执行权利要求1~8中任意一项所述星间通信约束下的卫星长期对日三轴指向姿态设计方法的计算机程序。
10.一种计算机可读存储介质,其特征在于,该计算机可读存储介质中存储有被编程或配置以执行权利要求1~8中任意一项所述星间通信约束下的卫星长期对日三轴指向姿态设计方法的计算机程序。
技术总结
本发明公开了一种星间通信约束下的卫星长期对日三轴指向姿态设计方法,包括综合考虑了对日指向、星间通信指向以及低倾角轨道下太阳光照条件剧烈变化的约束条件,提出了标称期望姿态设计方法、修正期望姿态设计方法、过渡期望姿态设计方法、翻转标称期望姿态设计方法和翻转修正期望姿态设计方法;并针对相应的期望姿态给出了操纵的期望角速率计算方法。本发明能够在满足卫星太阳帆板法向指向太阳的基本条件下,同时保证空间编队卫星之间的通信指向要求,并可避免低倾角轨道上卫星受晒条件的极性变化影响,为卫星提供稳定安全的长期对日姿态。
技术研发人员:张斌斌,季浩然,吴军
受保护的技术使用者:中国人民解放军国防科技大学
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!