一种双目视觉系统的运行方法与流程
本申请涉及双目视觉领域,具体涉及一种双目视觉系统的运行方法。
背景技术:
1、本部分旨在为权利要求书中陈述的本申请的实施方式提供背景或上下文。此处的描述不因为包括在本部分中就承认是已被公开的现有技术。
2、双目立体视觉(binocular stereo vision)是机器视觉的一种重要形式,它是基于视差原理并利用成像设备从不同的位置获取被测物体的两幅图像,通过计算图像对应点间的位置偏差,来获取物体三维几何信息的方法。
3、然而现有的双目立体视觉技术具有一些缺点,第一个缺点在于视差搜索范围有局限,无法随应用场景不同而动态调整视差搜索范围,如果视差搜索范围过小,会导致深度计算精度不足,或者特征点超出视差搜索范围后,计算错误;如果视差搜索范围过大,那么会导致计算时间增长,无法满足实时性、高帧率需求。第二个缺点在于目前双目立体视觉技术不具有对于图像感兴趣区域功能的支持,因此如果需要读取完整图像,对系统带宽占用会较高,并且不同场景下,需要不同的双目摄像模组(不同的基线长度和焦距),使得双目摄像模组通用性不强。
4、公开号为us10194135b2的专利文本公布了一种三维深度知觉装置和方法,该装置包括预处理模块、块匹配视差计算模块、深度计算模块、深度后处理模块在内的深度计算装置,然而该装置的预处理模块不具有视差搜索范围调整的功能。
技术实现思路
1、本申请的目的在于提供一种双目视觉系统的运行方法,能够动态调整视差搜索范围。
2、本申请公开了一种双目视觉系统的运行方法,包括:
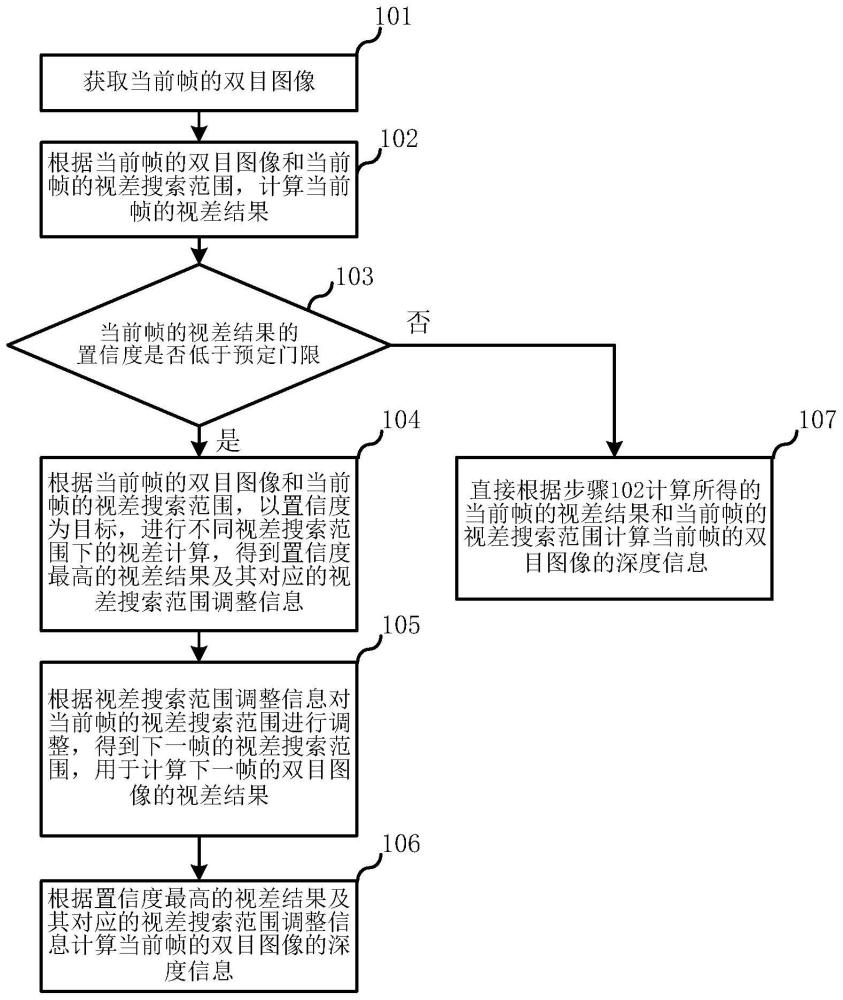
3、获取当前帧的双目图像;
4、根据所述当前帧的双目图像和当前帧的视差搜索范围,以置信度为目标,进行不同视差搜索范围下的视差计算,得到置信度最高的视差结果及其对应的视差搜索范围调整信息;
5、根据所述视差搜索范围调整信息对当前帧的视差搜索范围进行调整,得到下一帧的视差搜索范围,用于计算下一帧的双目图像的视差结果。
6、在一个优选例中,所述方法还包括:
7、根据所述置信度最高的视差结果及其对应的视差搜索范围调整信息计算所述当前帧的双目图像的深度信息。
8、在一个优选例中,所述进行不同视差搜索范围下的视差计算,进一步包括:
9、根据所述双目图像中目标物体的移动趋势确定不同的视差搜索范围。
10、在一个优选例中,所述根据所述视差搜索范围调整信息对当前帧的视差搜索范围进行调整,进一步包括:
11、获取双目视觉系统自身的移动信息;
12、根据所述移动信息和所述视差搜索范围调整信息对所述当前帧的视差搜索范围进行调整。
13、在一个优选例中,还包括:预先设定至少n个感兴趣区域,n为正整数;n个感兴趣区域的范围总和小于所述双目图像的范围;
14、所述获取当前帧的双目图像的步骤之后,还包括:
15、对所述当前帧的双目图像进行处理,去除所述n个感兴趣区域之外的局部图像。
16、在一个优选例中,所述获取当前帧的双目图像的步骤之后,还包括:
17、在近景模式下,通过自动调整感兴趣区域的位置,使得可检测范围靠近双目视觉系统的相机一侧的边界向相机一侧扩展。
18、在一个优选例中,所述获取当前帧的双目图像之后,还包括:
19、根据所述当前帧双目图像和当前帧的视差搜索范围计算当前帧的视差结果;
20、在所述当前帧的视差结果的置信度低于预定门限时,执行所述进行不同视差搜索范围下的视差计算的步骤。
21、在一个优选例中,根据用户通过输入设备输入的信息,设定视差范围调整模式。
22、本申请还公开了一种双目视觉系统,包括:
23、存储器,用于存储计算机可执行指令;以及,
24、处理器,与所述存储器耦合,用于在执行所述计算机可执行指令时实现如前文描述的方法中的步骤。
25、本申请还公开了一种计算机可读存储介质,所述计算机可读存储介质中存储有计算机可执行指令,所述计算机可执行指令被处理器执行时实现如前文描述的方法中的步骤。
26、本申请的实施方式中,可以获得精确的视差结果并动态调整视差搜索范围,使得对于双目视频的视差搜索范围始终维持在合适的范围,既不会因为视差搜索范围过小而导致深度计算精度不足,也不会因为视差搜索范围过大而导致计算时间增长。
27、此外,可以根据双目图像中目标物体的移动趋势确定不同的视差搜索范围,从而可以更准确而快速地调整视差搜索范围。
28、此外,可以根据双目视觉系统自身的移动信息和视差搜索范围调整信息对当前帧的视差搜索范围进行调整,从而可以更准确地调整视差搜索范围。
29、此外,通过在双目视觉左侧相机获取的左图左侧和右侧相机获取的右图右侧去除相同宽度的像素点以调整roi区域的范围,从而调整可检测范围,最终实现近景范围扩展。
30、此外,通过预先定义roi区域,可以减少数据的传输量。
31、此外,本申请实施方式还具有多种不同应用场景的选择模式,互不冲突,用户可以根据自己的需要进行选择,还减少了对双目摄像头模组的使用限制。
32、上述
技术实现要素:
中公开的各个技术特征、在下文各个实施方式和例子中公开的各技术特征、以及附图中公开的各个技术特征,都可以自由地互相组合,从而构成各种新的技术方案(这些技术方案均应该视为在本说明书中已经记载),除非这种技术特征的组合在技术上是不可行的。例如,在一个例子中公开了特征a+b+c,在另一个例子中公开了特征a+b+d+e,而特征c和d是起到相同作用的等同技术手段,技术上只要择一使用即可,不可能同时采用,特征e技术上可以与特征c相组合,则,a+b+c+d的方案因技术不可行而应当不被视为已经记载,而a+b+c+e的方案应当视为已经被记载。
技术特征:
1.一种双目视觉系统的运行方法,其特征在于,包括:
2.如权利要求1所述的双目视觉系统的运行方法,其特征在于,所述方法还包括:
3.如权利要求1所述的双目视觉系统的运行方法,其特征在于,所述进行不同视差搜索范围下的视差计算,进一步包括:
4.如权利要求1所述的双目视觉系统的运行方法,其特征在于,所述根据所述视差搜索范围调整信息对当前帧的视差搜索范围进行调整,进一步包括:
5.如权利要求1所述的双目视觉系统的运行方法,其特征在于,还包括:预先设定至少n个感兴趣区域,n为正整数;n个感兴趣区域的范围总和小于所述双目图像的范围;
6.如权利要求1所述的双目视觉系统的运行方法,其特征在于,所述获取当前帧的双目图像的步骤之后,还包括:
7.如权利要求1-6中任意一项所述的双目视觉系统的运行方法,其特征在于,所述获取当前帧的双目图像之后,还包括:
8.如权利要求1-6中任意一项所述的双目视觉系统的运行方法,其特征在于,
9.一种双目视觉系统,其特征在于,包括:
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质中存储有计算机可执行指令,所述计算机可执行指令被处理器执行时实现如权利要求1至8中任意一项所述的方法中的步骤。
技术总结
本申请涉及双目视觉领域,公开了一种双目视觉系统的运行方法,可以动态调整视差搜索范围,并且帧率高延迟低。该方法包括:获取当前帧的双目图像;根据当前帧的双目图像和当前帧的视差搜索范围,以置信度为目标,进行不同视差搜索范围下的视差计算,得到置信度最高的视差结果及其对应的视差搜索范围调整信息;根据视差搜索范围调整信息对当前帧的视差搜索范围进行调整,得到下一帧的视差搜索范围,用于计算下一帧的双目图像的视差结果。
技术研发人员:董承梁
受保护的技术使用者:神顶科技(南京)有限公司
技术研发日:
技术公布日:2024/4/7
- 还没有人留言评论。精彩留言会获得点赞!