一种海上风电场的动态微观布局方法、系统及设备与流程
本发明属于风力发电,具体涉及一种海上风电场的动态微观布局方法、系统及设备。
背景技术:
1、随着风电产业的快速发展,陆地风能资源逐步开发殆尽,海上风电已成为风电新增装机的重点。近海区风电装机主要以固定式海上风电机组为主,而从经济性角度考虑,漂浮式海上风电机组是深远海区风电装机的首选。与固定式海上风电机组以及陆地风电机组不同,漂浮式风电机组在浮式基础中引入了额外的自由度,大大增加了系统的不确定性和不稳定性。反过来,漂浮式风电机组也因浮式基础的额外自由度而更具灵活性,对其特性加以利用将大大推动漂浮式风电机组的快速大规划发展。
2、从理论上讲,利用浮式基础灵活性优势的方式之一是风电场微观布局。一般在对风电场进行风资源分析及宏观选址后,综合考虑尾流效应对风力机的影响,开展风电场微观布局工作。陆地风电场的微观布局较为简单,常选定单一工况、多个典型工况或依据全年平均风速谱分布,以整场风能利用率最大化目标对设计风电机组布局。陆地风电场前期的微观布局一定选定,则较难改变。而风电场风资源特性是随年、季节、月变化的,固定的微观布局对风资源特性变化的可适应性不足,易造成整场能量捕获损失。
技术实现思路
1、本发明的目的在于提供一种海上风电场的动态微观布局方法、系统及设备,解决了目前尚未有海上风电场的微观布局,造成整场能量捕获损失,本发明提供的动态微观布局方法用于提升微观布局对外界环境的可适应性,提升整场发电量。
2、为了达到上述目的,本发明采用的技术方案是:
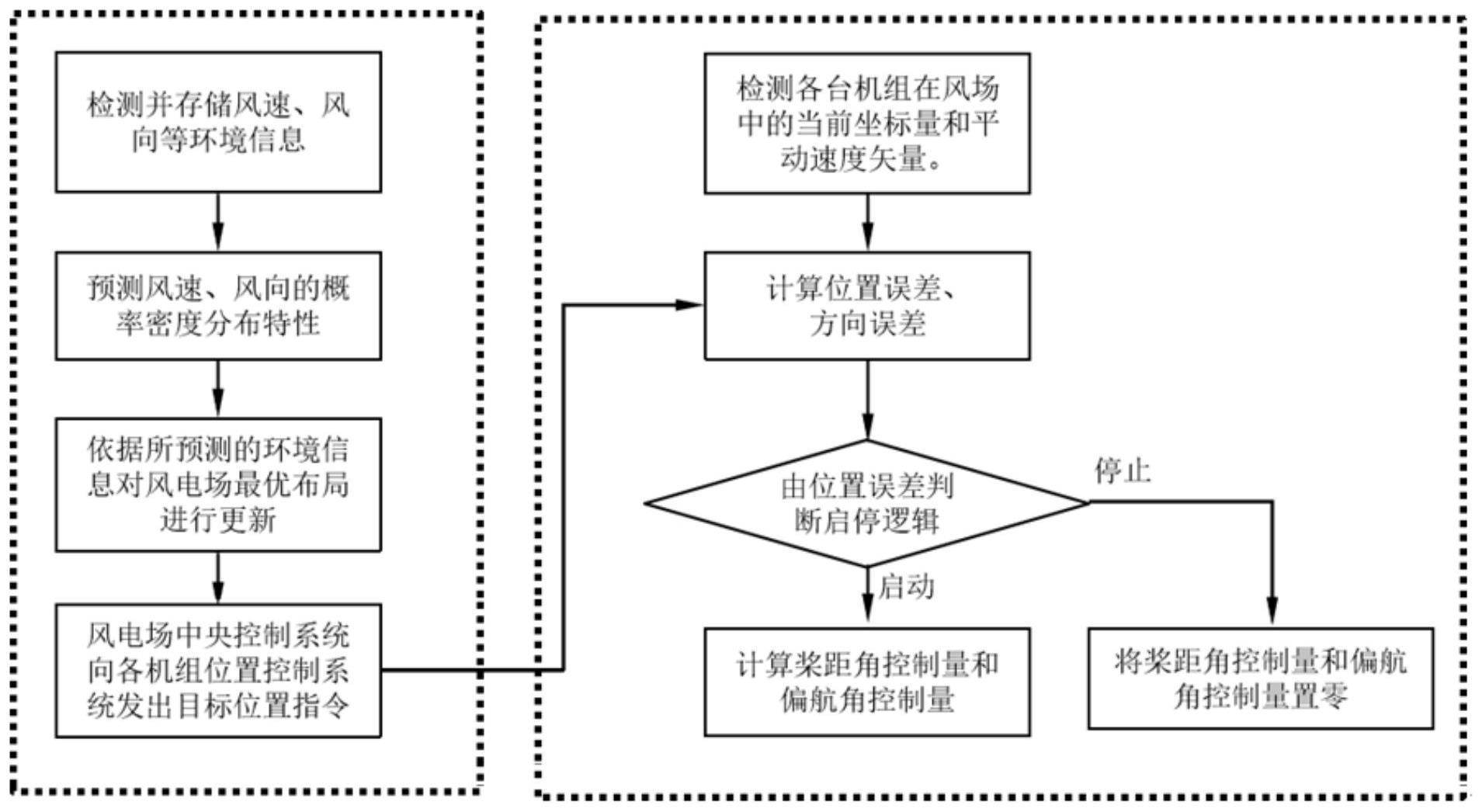
3、本发明提供的一种海上风电场的动态微观布局方法,包括以下步骤:
4、步骤1,获取待测海上风电场的风速信息和风向信息;
5、步骤2,基于步骤1中得到的风速信息和风向信息预测风速信息和风向信息的概率分布特性;
6、步骤3,根据步骤2中预测得到的概率分布特征对待测海上风电场的微观布局进行优化,得到待测海上风电场中每个机组的目标位置;
7、步骤4,获取待测海上风电场中每个机组的当前坐标和平动速度矢量;
8、步骤5,计算每个机组对应的位置误差和方向误差;
9、步骤6,根据得到的位置误差和方向误差对待测海上风电场进行动态微观布局。
10、优选地,步骤2中,基于步骤1中得到的风速信息和风向信息预测风速信息和风向信息的概率分布特性,具体方法是:
11、利用威布尔分布函数对风速信息和风向信息的概率密度分布进行拟合,得到尺度参数和形状参数;
12、利用得到的尺度参数和形状参数,结合预测算法对未来设定时间段内的风速和风向的威布尔分布规律进行预测,得到风速信息和风向信息的概率分布特性。
13、优选地,步骤3中,根据步骤2中预测得到的概率分布特征对待测海上风电场的微观布局进行优化,得到待测海上风电场中每个机组的目标位置,具体方法是:
14、基于步骤2中预测得到的概率分布特征,分别以全年、全季或全月整场风能利用量最大为优化目标;利用优化算法对待测海上风电场的微观布局进行优化,得到待测海上风电场中每个机组的目标位置。
15、优选地,步骤5中,计算每个机组对应的位置误差和方向误差,具体方法是:
16、计算每个机组对应的平动速度矢量与x轴的夹角、当前坐标与目标位置之间的距离、以及当前坐标与目标坐标之间的位移矢量与x轴的夹角;
17、根据当前坐标与目标位置之间的距离计算每个机组的位置误差;
18、根据平动速度矢量与x轴的夹角、当前坐标与目标位置之间的位移矢量和当前坐标与x轴的夹角,计算每个机组的方向误差。
19、优选地,步骤6中,根据得到的位置误差和方向误差对待测海上风电场进行动态微观布局,具体方法是:
20、根据每个机组的位置误差判断每个机组的具体位置控制策略的启停;
21、当判断结果为开启时,计算每个机组对应的桨距角控制量和偏航角控制量,并控制每个机组运动到以目标位置为圆心、r1为半径的圆域内,其中,r1为预设阈值;
22、当判断结果为停止时,则将每个机组对应的桨距角控制量和偏航角控制量置为零,并控制每个机组的坐标位置不变。
23、优选地,根据每个机组的位置误差和方向误差判断每个机组的具体位置控制策略的启停,具体方法是:
24、若当前位置控制为启动状态,则当前位置控制策略从启动到关闭切换的逻辑量为:eβ≤r1;
25、若当前位置控制为关闭状态,则当前位置控制策略从关闭到启动切换的逻辑量为:eβ≥r2;
26、其中,r1和r2为预设阈值,且r1<r2。
27、本发明提供的一种海上风电场的动态微观布局系统,包括:
28、信息获取单元,用于获取待测海上风电场的风速信息和风向信息;
29、位置获取单元,用于基于得到的风速信息和风向信息预测风速信息和风向信息的概率分布特性;
30、根据预测得到的概率分布特征对待测海上风电场的微观布局进行优化,得到待测海上风电场中每个机组的目标位置;
31、参量计算单元,用于获取待测海上风电场中每个机组的当前坐标和平动速度矢量;
32、计算每个机组对应的位置误差和方向误差;
33、控制单元,用于根据得到的位置误差和方向误差对待测海上风电场进行动态微观布局。
34、本发明提供的一种海上风电场的动态微观布局设备,包括处理器、以及能够在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现所述方法的步骤。
35、与现有技术相比,本发明的有益效果是:
36、本发明提供的一种海上风电场的动态微观布局方法,所述方法可按年、季节或月等不同时间尺度对风电场的风电机组布局进行更新,可增强微观布局对外界环境的可适应性,提高整场发电量;所述方法基于威布尔分布的假设将风速、风向概率密度分布规律与尺度参数a、形状参数b对应起来,直接对尺度参数a和形状参数b进行预测,其精度比先预测风速、风向的时间序列再进行统计分析更加简单高效;所述方法按年、季或月等时间尺度进行动态布局更新,避免了频繁启动风场动态微观布局引起的变桨、偏航耗能及风能利用的损失;所述方法依据位置误差eβ的大小来判断是否启用或停止位置控制策略,减少频繁位置控制过程引起的变桨、偏航耗能及风能利用的损失;所述方法以位置误差eβ的大小来建立位置控制启停缓冲区,减少了频繁启动和关闭切换位置控制过程;所述方法将机组的位置控制按位置误差控制和方向误差控制进行解耦,利用偏航控制能够改变推力方向,利用变桨控制改变推力大小,实现推力大小和方向解耦控制,进一步实现机组平动速度方向和大小的解耦控制;所述方法分别设计桨距角和偏航角pid控制器,桨距角控制环用于减少位置误差eβ,偏航角控制环用于消除方向误差eγ,最终使得机组运动到目标位置为圆心、r1为半径的圆域内。
技术特征:
1.一种海上风电场的动态微观布局方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种海上风电场的动态微观布局方法,其特征在于,步骤2中,基于步骤1中得到的风速信息和风向信息预测风速信息和风向信息的概率分布特性,具体方法是:
3.根据权利要求1所述的一种海上风电场的动态微观布局方法,其特征在于,步骤3中,根据步骤2中预测得到的概率分布特征对待测海上风电场的微观布局进行优化,得到待测海上风电场中每个机组的目标位置,具体方法是:
4.根据权利要求1所述的一种海上风电场的动态微观布局方法,其特征在于,步骤5中,计算每个机组对应的位置误差和方向误差,具体方法是:
5.根据权利要求4所述的一种海上风电场的动态微观布局方法,其特征在于,步骤6中,根据得到的位置误差和方向误差对待测海上风电场进行动态微观布局,具体方法是:
6.根据权利要求5所述的一种海上风电场的动态微观布局方法,其特征在于,根据每个机组的位置误差和方向误差判断每个机组的具体位置控制策略的启停,具体方法是:
7.一种海上风电场的动态微观布局系统,其特征在于,包括:
8.一种海上风电场的动态微观布局设备,其特征在于,包括处理器、以及能够在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求1-6中任一项所述方法的步骤。
技术总结
本发明提供的一种海上风电场的动态微观布局方法、系统及设备,包括以下步骤:步骤1,获取待测海上风电场的风速信息和风向信息;步骤2,基于步骤1中得到的风速信息和风向信息预测风速信息和风向信息的概率分布特性;步骤3,根据步骤2中预测得到的概率分布特征对待测海上风电场的微观布局进行优化,得到待测海上风电场中每个机组的目标位置;步骤4,获取待测海上风电场中每个机组的当前坐标和平动速度矢量;步骤5,计算每个机组对应的桨距角控制量和偏航角控制量;步骤6,根据得到的桨距角控制量和偏航角控制量对待测海上风电场进行动态微观布局;本发明可增强微观布局对外界环境的可适应性,提高整场发电量。
技术研发人员:许瑾,邓巍,刘艳贵,汪臻,王海明,王英丞,张育钧,张恩享,高建忠
受保护的技术使用者:西安热工研究院有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!